
Вопросы навигационного использования искусственных спутников Земли приобрели практический смысл с запуском первого советского ИСЗ 4 октября 1957 г. Проведенные вскоре после этого исследования показали принципиальную возможность определения координат судна — обсервации — по наблюдениям ИСЗ при помощи радиотехнических средств, получила развитие новая отрасль навигации как общей науки о судовождении— спутниковая навигация.
Теперь уже можно сказать, что использование ИСЗ открыло новую страницу в истории мореплавания. СНС сочетают в себе высокие эксплуатационные качества, недоступные для систем радионавигации (РНС) и тем более — традиционных астрономических методов навигации. СНС способны обеспечить глобальность действия, т. е. гарантируют удовлетворяющую современным требованиям точность обсервации при нахождении судна в любом районе Мирового океана, а не в определенной ограниченной его области, как существующие РНС. Так, РНС «Лоран-А» дает возможность навигационных определений только в северной части океана (дальность действия 2500 миль), а РНС «Декка» (1200 миль) по существу является системой местного значения. Точность обсервации по СНС практически одинакова во всей рабочей зоне — на всей поверхности Земли и, по крайней мере, в несколько раз выше, чем при использовании РНС дальнего действия (тем более — традиционных астрономических определений, которые, кстати сказать, и в наши дни — в начале 70-х годов обеспечивают 30% всех обсерваций). Важно отметить исключительно высокую надежность СНС, поскольку возможность их использования практически не зависит ни от гидрометеоусловий, ни от времени суток, ни от времени года. Наконец, применение СНС позволяет полностью автоматизировать весь процесс получения, обработки и выдачи навигационной информации в судовых условиях, в том числе и в условиях малого прогулочного судна.
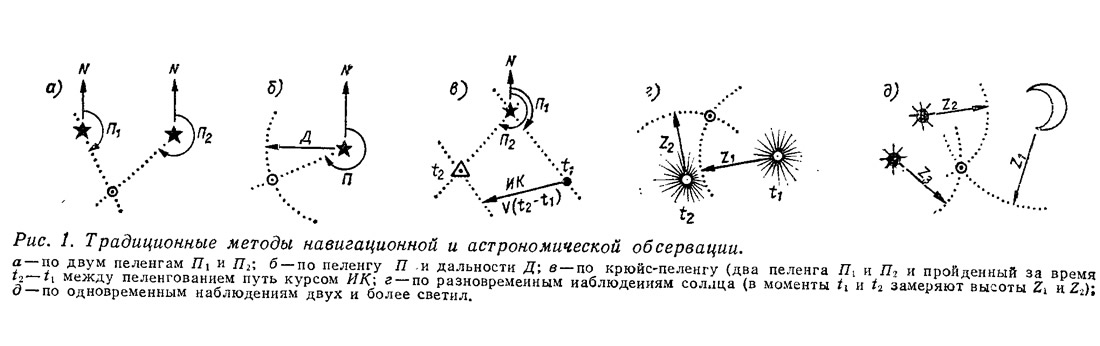
Процесс навигационной обсервации по любому из традиционных методов (рис. 1) можно разделить на три этапа:
- 1) измерение навигационных параметров (пеленгов, расстояний, углов и т. п.), связывающих судно с навигационным ориентиром (например, маяком или небесным светилом), определяющих их взаимное положение;
- 2) определение местоположения самого навигационного ориентира (земных ориентиров — на картах; звезд, Солнца и планет — по морскому астрономическому ежегоднику);
- 3) определение собственно координат судна графическим или аналитическим методами.
Изолиния навигационного параметра на земной поверхности называется линией положения; она представляет собой геометрическое место точек, в каждой из которых величина данного параметра одинакова.
Измерение одного навигационного параметра дает основание считать, что наблюдатель в этот момент находится в какой-то одной из множества точек соответствующей линии положения. Точка же пересечения на земной поверхности двух линий положения — в случае измерения значений двух параметров — и будет являться обсервованной точкой.
Рассмотрим случай определения места по двум пеленгам (см. рис. 1, а). Первый этап решения этой навигационной задачи включает измерение двух навигационных параметров — горизонтальных углов, т. е. П1 и П2, и исправление измеренных значений поправкой компаса. Второй этап сводится к отысканию на карте навигационных ориентиров (скажем, двух маяков), которые были использованы при взятии этих двух пеленгов. Третий этап заключается в графическом построении на карте линий положения для обоих параметров П1 и П2 и отыскании точки их пересечения. Такова же последовательность операций и при использовании любых других методов обсервации. Однако методы обсерваций могут различаться по количеству используемых навигационных ориентиров и составу навигационных параметров; измерения могут осуществляться как одновременно (см. рис. 1, а, б, д), так и в разное время (см. рис. 1, в, г); навигационные ориентиры могут быть неподвижными (см. рис. 1, а—в) или перемещающимися за время между измерениями (см. рис. 1, г).
Все сказанное полностью относится и к СНС, в которых в качестве навигационных ориентиров используются навигационные спутники — НИСЗ. В принципе, применяемые в СНС методы наиболее близки к традиционному способу астрономической обсервации по разновременным наблюдениям одного и того же перемещающегося небесного светила (см. рис. 1, г). Однако НИСЗ, в отличие от небесных светил, меняет свое положение относительно наблюдателя очень быстро, пролетая «видимую» часть горизонта за 10—16 мин (при высоте орбиты порядка 1000 км). Это не недостаток, как может показаться на первый взгляд, а важное достоинство; обеспечивается значительное изменение измеряемого навигационного параметра за короткое время одного прохождения, вполне достаточное для надежной обсервации. (При астрономической же обсервации по одному светилу, как известно, для получения надежного определения места необходимо, чтобы линии положения пересекались под углом не менее 30°, а на такое перемещение светила требуется не менее 2—4 ч.)
В существующих СНС обсервация обычно производится по наблюдениям одного быстро движущегося по околоземной орбите НИСЗ; при этом последовательно измеряется множество значений одного и того же навигационного параметра. Однако, по аналогии с традиционными методами обсервации с одновременным получением нескольких линий положения, можно предположить возможность использования СНС, в которых одновременно измеряются либо несколько разных навигационных параметров (например, дальность, азимут, угловая высота) с применением одного НИСЗ, либо несколько значений одного и того же навигационного параметра, но с применением нескольких НИСЗ. Очевидно, что во всех случаях принципиального различия между традиционными методами обсервации и методами спутниковой навигации нет.
Особенности реализации трех основных этапов обсервации в СНС определяются видом используемых навигационных параметров, а также применяемыми методами измерений и обработки информации. Из этих трех этапов в СНС лишь второй — определение координат НИСЗ в моменты измерений навигационных параметров — представляет новую для судовождения задачу. Принципиальной основой для ее решения является закономерный характер движения НИСЗ вокруг Земли, в связи с чем координаты его на любой момент времени могут прогнозироваться с заданной точностью. Однако орбита НИСЗ нестабильна из-за тормозящего влияния атмосферы (хотя она и разрежена), неравномерности распределения массы Земли, притяжения Луны, Солнца и т.д. Вследствие этого прогнозирование координат НИСЗ производится лишь на короткое время (порядка суток), а элементы орбиты непрерывно уточняются путем систематических наблюдений за НИСЗ.
Наблюдение за движением спутника с целью траекторных измерений и радиоконтроля за работой бортовых систем выполняется наземными станциями слежения (СС), расположенными в полосе движения НИСЗ (рис. 2). Полученные данные передаются в координационно-вычислительный центр (КВЦ), где производится прогнозирование движения НИСЗ с последующей передачей предвычисленных его координат (эфемерид) через станции ввода (СВ) на спутник. На борту НИСЗ имеются приемо-передающая аппаратура и блок памяти, в который поступает принятая от СВ в виде кодированных радиосигналов информация.
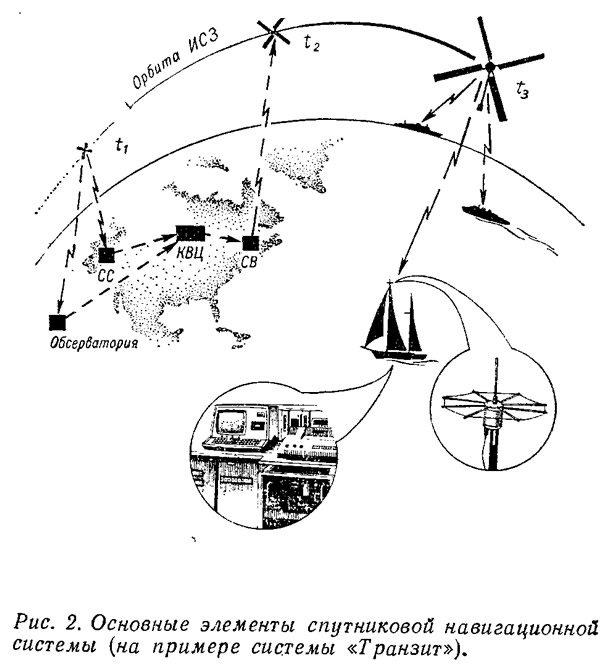
Периодически эти денные передаются с НИСЗ потребителям — на судовые приемоиндикаторы; они вводятся в ЦВМ и по ним автоматически вычисляются эфемериды спутника — координаты навигационного ориентира — уже конкретно на моменты измерений навигационных параметров.
Имеющаяся на судне специальная радионавигационная аппаратура позволяет решать задачу первого этапа (определяет соответствующие навигационные параметры), а вычислительное устройство — задачу третьего этапа (по заданной программе обрабатывает как принятую с НИСЗ эфемеридную информацию, так и измерения параметров, выдает обсервованные координаты).
В зависимости от того, какие параметры положения НИСЗ измеряются, различают, например, дальномер-ный, угломерно-дальномерный, разностно-дальномерный, радиально-скоростной и другие методы определения места судна в СНС.
Каждое измеренное значение навигационного параметра образует в пространстве некоторую поверхность, которую называют поверхностью положения данного параметра. Например, можно считать, что все наблюдатели, измерившие одновременно одинаковое значение дальности Д до одного и того же навигационного ориентира — НИСЗ, находятся в этот момент на поверхности сферы радиуса Д с центром в НИСЗ. Ясно, что различным значениям одного и того же параметра соответствует семейство поверхностей положения одинакового вида (например, для дальностей — семейство концентрических сфер).
Условию одновременного нахождения наблюдателя на поверхности положения измеренного навигационного параметра и на поверхности Земли соответствует геометрическое место точек, называемое, как мы уже знаем, изолинией данного параметра. Положение судна на поверхности Земли однозначно определяется как координаты точки пересечения двух поверхностей положения, соответствующих измеряемым навигационным параметрам, с поверхностью Земли или, другими словами, как координаты точки пересечения двух изолиний данного параметра.
Для получения двух пересекающихся изолиний при использовании одного НИСЗ, как реализовано в существующих СНС, достаточно либо одновременно измерить два разных навигационных параметра, либо в разное время измерить два значения одного навигационного параметра (случай, подобный обсервации по крюйс-пеленгу).
Информация об изображении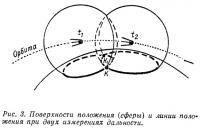
Рис. 3. Поверхности положения и линии положения при двух измерениях дальности
Так, при использовании дальномерного метода в качестве навигационного параметра используются дальности, измеряемые существующими радиотехническими средствами с точностью до единиц метров. Необходимо в разные моменты времени произвести измерения не менее двух расстояний между судном и НИСЗ (рис. 3). Измеренным в моменты t1 и t2 дальностям соответствуют две сферические поверхности положения, центры которых совпадают с координатами положения НИСЗ в эти моменты. При этом место судна определяется как точка пересечения двух полученных сферических поверхностей положения с третьей — поверхностью Земли. Неоднозначность обсервации, т. е. наличие двух с геометрической точки зрения равноценных точек К и K1 — следствие непрямолинейности линий положения. Для исключения этой неоднозначности практически необходимо привлекать какую-то дополнительную информацию о положении судна (например, использовать счислимые координаты).
Рис. 3. Поверхности положения и линии положения при двух измерениях дальности
Наиболее широкое применение получил разностно-дальномерный метод, основанный на измерении скорости сближения НИСЗ и наблюдателя с использованием эффекта Допплера и поэтому нередко называемый также допплеровским.
Эффект Допплера заключается в том, что при взаимном перемещении источника и приемника излучения частота принимаемых колебаний f отличается от частоты излучаемых колебаний f0, причем разность частот Δf (допплеровское смещение частоты) пропорциональна относительной скорости перемещения:

где r(t) — текущее значение расстояния между приемником и передатчиком;
λ — длина рабочей волны.
Информация об изображении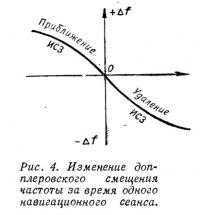
Рис. 4. Изменение допплеровского смещения частоты за время навигационного сеанса
При приближении приемника к источнику колебаний за единицу времени будет приниматься большее, а при удалении — меньшее число волн, чем на неподвижном приемнике. В первом случае f>f0, а во втором f<f0.
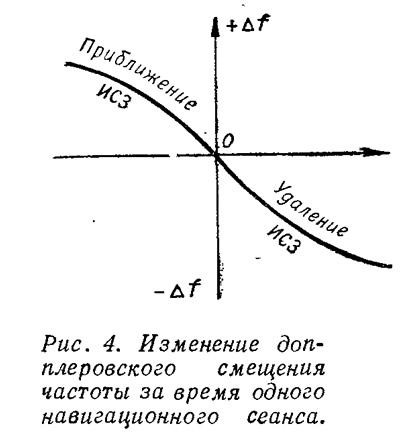
Рис. 4. Изменение допплеровского смещения частоты за время навигационного сеанса
Следствием эффекта Допплера будет то, что неподвижный наблюдатель на Земле принимает с движущегося НИСЗ колебания частоты f, отличающейся от излучаемой частоты f0. Судовой приемник фиксирует допплеровское смещение частоты Δf путем выделения частоты биений между частотой принятого сигнала и опорной частотой судового генератора эталонных колебаний. Во время движения НИСЗ допплеровское смещение частоты непрерывно изменяется (рис. 4) от положительного значения к отрицательному, принимая нулевое значение в момент наибольшего приближения к наблюдателю.
Периодические измерения допплеровского смещения частоты позволяют определить скорость изменения дальности, или радиальную скорость

Поверхность положения для каждой измеренной радиальной скорости представляет собой конус, вершина которого совпадает с положением НИСЗ в момент измерения, ось — с вектором его скорости, а образующая — с линией, соединяющей точку местоположения наблюдателя и НИСЗ (рис. 5). По мере приближения НИСЗ к наблюдателю радиальная скорость, оставаясь отрицательной, убывает по значению, угол Θ при вершине конуса увеличивается, конус «разворачивается». В момент максимального приближения НИСЗ к наблюдателю vr=0, а Θ=90°, т. е. конус вырождается в плоскость. Затем радиальная скорость становится положительной, а Θ>90°, конус «выворачивается наизнанку».

Поскольку наблюдатель находится на поверхности Земли, его место надо искать на кривой, по которой поверхность этого конуса пересекается с поверхностью Земли (в пределах зоны видимости). Эту кривую (изолинию) называют изодопой, поскольку она характеризуется постоянством допплеровского смещения частоты (Δf=const) и соответственно — постоянством радиальной скорости сближения с НИСЗ.
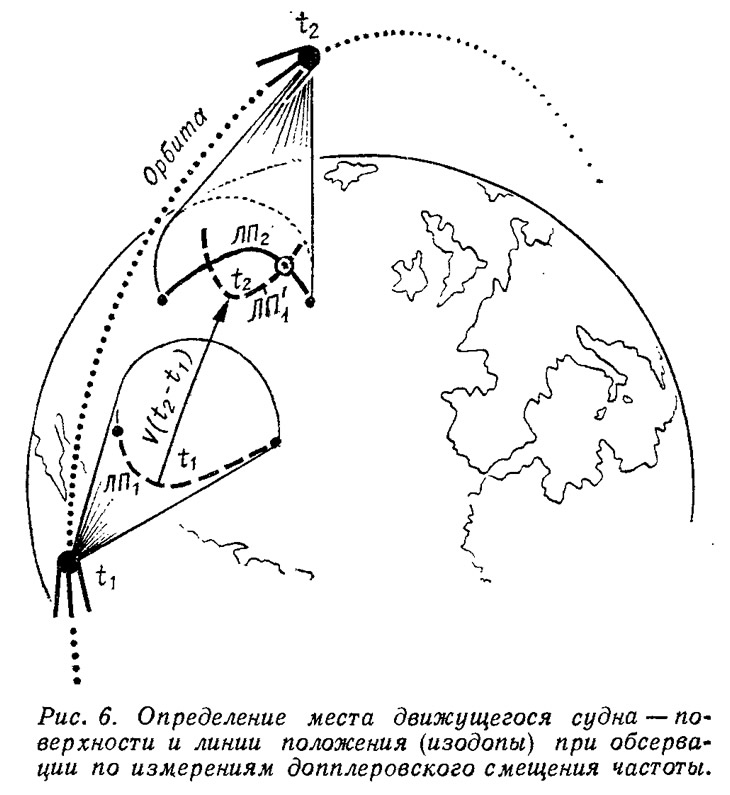
Перемещение спутника приводит к перемещению зоны видимости и соответствующих ей изодоп (рис. 6). Для определения места требуется иметь по крайней мере две изодопы, из которых вторая (ЛП2) может быть получена через несколько минут после первой (ЛП1). При этом задача приведения результатов измерений навигационного параметра к одному моменту времени (например, к моменту последнего измерения, подобно приведению к одному зениту — в мореходной астрономии, либо крюйс-пеленгу) решается традиционным в судовождении методом: параллельным переносом первой линии положения ЛП1 на величину пути, пройденного судном за время между измерениями t1 и t2. В результате координаты судна на момент t2 определятся точкой пересечения смещенной — строго параллельно — изодопы ЛП'1 и изодопы ЛП2. Неоднозначность решения разрешается при помощи счисления.
Положение точки пересечения нескольких изодоп, построенных в принятой системе координат для нескольких положений НИСЗ, является обсервованным местоположением судна. Поскольку пространственные кривые, соответствующие изодопам, точно описываются определенным математическим уравнением, можно свести задачу к решению системы уравнений. Таким образом практически остается запрограммировать решение функциональной зависимости между известным положением навигационного ориентира — НИСЗ, измеренными навигационными параметрами (скорость изменения дальности, дальность) и координатами судна с учетом дополнительно вводимых данных о его перемещении. Судовое вычислительное устройство автоматически выполняет расчеты и выдает информацию на световое табло или телетайп.
В качестве примера рассмотрим американскую СНС «Транзит», являющуюся глобальной всепогодной системой определения места судна по измерениям допплеровского сдвига частоты на одном прохождении НИСЗ в зоне радиовидимости потребителя.
Система состоит из нескольких НИСЗ, наземной системы обеспечения и судовой аппаратуры. В настоящее время на околоземных орбитах находится шесть спутников системы, запущенных в период с 1967 по 1973 г. с полигона ракетной базы Ванденберг. Каждый из НИСЗ выведен на круговую полярную орбиту высотой порядка 1000 км. Сам спутник представляет собой восьмиугольную призму весом 56 кг, имеющую 45 см в поперечнике и 30 см в высоту. На четырех его гранях расположены панели солнечных элементов, которые раскрываются после отделения последней четвертой ступени ракеты-носителя «Скаут». В верхней его части выдвигается 30-метровая штанга с грузом на конце для гравитационной стабилизации.
Наземный комплекс системы состоит из четырех станций слежения, станций ввода (закладки) информации на НИСЗ, вычислительного центра (ВЦ) и морской обсерватории, расположенных на территории США и связанных между собой высокоскоростными линиями связи. На ВЦ поступают информация, принятая СС от спутников, и сигналы времени от обсерватории, периодически производится вычисление орбиты для каждого НИСЗ и прогнозирование его положения на каждую четную минуту на ближайшие 16 ч. (Можно отметить, что выполняющая более 500 000 операций в секунду ЦВМ затрачивает на эти расчеты около 2,5 ч).
СВ хранит поступающие из ВЦ данные до момента появления спутника в зоне радиовидимости, а после устойчивого захвата его сигнала за несколько секунд производит считывание всех данных из запоминающего устройства (ЗУ) и передачу их на спутник. На НИСЗ эта информация записывается в ЗУ, после чего непрерывно в течение 16 ч передается потребителям с уточнением параметров орбиты каждые 2 мин.
Принятые с НИСЗ параметры орбиты, сигналы точного времени и сигналы непрерывного излучения ведущей частоты через антенно-фидерное устройство поступают в приемное устройство, где происходит предварительная обработка данных и их ввод в вычислительное устройство. При этом для выделения допплеровских сигналов с генератора опорной частоты в приемник подаются колебания стандартной частоты высокой стабильности. ВУ по заданной программе определяет навигационные параметры положения НИСЗ в моменты измерений и рассчитывает координаты места судна в море. Полученные результаты выводятся на пульт отображения и регистрации навигационной информации. Обслуживание судовой аппаратуры не требует специальной подготовки оператора.
СНС «Транзит» обеспечивает определение места судна каждые 40—70 мин (при очередном прохождении НИСЗ) с точностью от 100 до 300 м в зависимости от модификации аппаратуры. В промежутках между обсервациями та же аппаратура и так же автоматически непрерывно выдает текущие координаты, решая задачу счисления пути судна по вводимым данным указателей курса и скорости.
Судовая аппаратура СНС «Транзит» выпускается рядом фирм в США, Канаде, Англии, Франции, Японии и Норвегии. Большой интерес с точки зрения использования на малых судах представляет модель «МХ-1102» (рис. 7) фирмы «Магнавокс» (США), демонстрировавшаяся в октябре 1976 г. на международной выставке «Судоавтоматика-76» в Ленинграде. Вес установки (габариты 43X42Х35 см) вместе с антенной составляет 38 кг, предельная ошибка указания координат 300 м (номинальная точность — 0,1 мили). Потребляемая мощность — 150 Вт. Стоимость этой модели на внешнем рынке 30 тыс. долл.

Для использования на малых судах в США выпускается и упрощенный вариант аппаратуры — «Транзим» (габариты 42X42X14 см; вес 15 кг).
Вопрос о том, выгодно ли использовать СНС при сравнительно высокой стоимости аппаратуры, уже не ставится. Подсчитано, например, что применение СНС позволяет только за счет повышения точности судовождения экономить более 0,5% времени нахождения в плавании. При современной эффективности использования транспортного флота, когда судно находится в море в среднем 215 суток в году, это равносильно экономии стоимости суточной эксплуатации судна с грузом. Иными словами, уже этого достаточно, чтобы судовая аппаратура окупалась за первый год работы. Началось интенсивное оборудование судов аппаратурой СНС: к исходу 1976 г. она была установлена уже более чем на 1500 судах мирового флота, в том числе на ряде больших крейсерских яхт.
Возможность передачи через спутники различной информации делает реальным создание системы централизованного управления действиями флота, а также системы поиска и спасения аварийных судов в море.
У нас в стране — в Министерстве морского флота СССР — образовано Всесоюзное объединение «Морсвязьспутник», на которое возложено обеспечение технической эксплуатации спутников как для связи с судами в море, так и для навигации.