
Однако еще в 1985 г. я заявил, а в 1987—1988 г. получил два авторских свидетельства на детские игрушки — модели подводных аппаратов, действующие по описанному в обзоре принципу. Это подводные планеры, движущиеся за счет управляемой балластной системы и развитых несущих поверхностей.
Кстати, утверждение, что «никакого движителя на этом аппарате нет», — некорректно: движителем служат те самые «развитые несущие поверхности».
Не сомневаюсь, что принцип подводного планирования может быть использован для движения автономных подводных научно-исследовательских, геолого-разведочных и прогулочных аппаратов, причем, не исключено, что и с экономическими преимуществами, по сравнению с традиционными двигателями-движителями.
Из закона сохранения энергии следует, что для перемены знака балласта на глубине для подводного планера (это дает ему возможность пройти некоторое расстояние) надо затратить столько же работы, сколько и для перемещения традиционного подводного аппарата на то же расстояние с той же скоростью за счет работы гребного винта. Но традиционному аппарату надо также погрузиться на ту же глубину и всплыть на поверхность, т. е. израсходовать еще столько же энергии на перемену знака балласта. Отсюда следует, что при однократном погружении подводный планер вдвое экономичнее.
Если учесть, что КПД гребного винта существенно ниже пропульсивного КПД крыла в режиме планирования (за счет меньших относительных скоростей и меньшей турбулизации потока), то выигрыш будет еще выше.
Японцами на модели планера длиной 1,5 м достигнута скорость планирования 7 узлов. Аппарат больших размеров будет иметь и большую скорость планирования («длина бежит!»).
Для построенных автономных подводных научно-исследовательских аппаратов длиной 4—8 м характерна крейсерская скорость 1,5—3 узла. Следовательно, подводный планер аналогичных размеров будет в 3—5 раз быстроходнее!
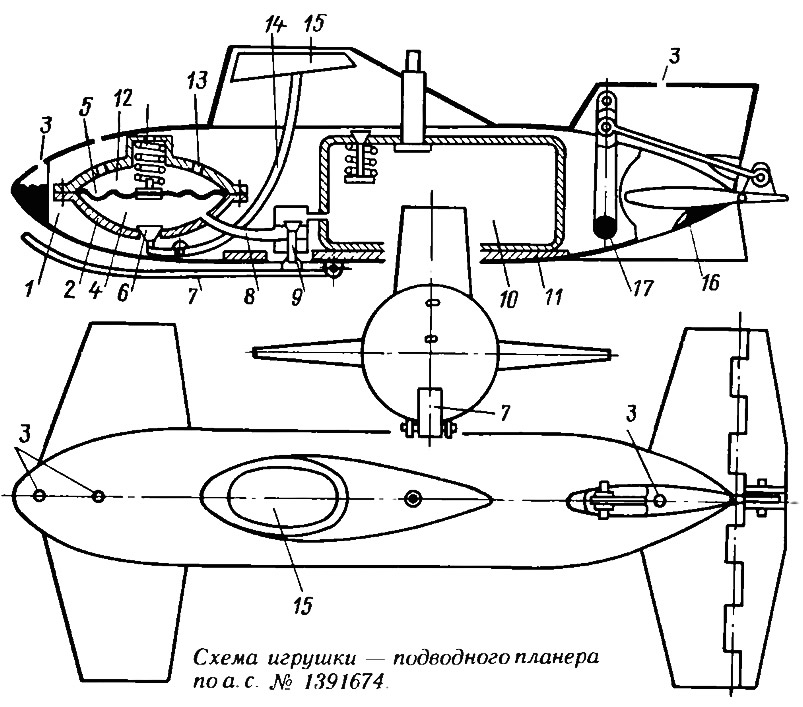
Игрушка представляет собой самоходную модель научно-исследовательского аппарата. Нажатие на рычаг 7 (или касание им дна) открывает клапан 9. Сжатый воздух из баллона 10 по трубке 8 поступает в воздушную полость 4 камеры 2, выгибая вверх подпружиненную диафрагму 5, он выдавливает воду из полости 12 через отверстия 13 Происходит «продувка балластной цистерны» аппарат начинает всплывать.
Как только «рубка» покажется из воды, поплавок 15 станет играть роль груза на конце двуплечего рычага 14 и откроет клапан 6, стравливающий воздух из воздушной полости 4. Мембрана займет прежнее нижнее положение - аппарат «примет балласт» Обозначены: 3 отверстия для заполнения водой «легкого корпуса» 1; 11 плита основания; 16 — груз для точной дифферентовки; 17 — грузик маятниковой системы автоматической перекладки горизонтального руля.
Спроектированная автором игрушка длиной 540 мм и весом 1,7 кг за один цикл погружение — всплытие при глубине бассейна 1,5 м проходит расстояние по прямой 10 м. При емкости расходной цистерны 1 л (начальное давление 2 кгс/см2) одной зарядки хватает на 10 таких циклов.
Г. В. Сарин считает вполне реальным создание одноместного автономного прогулочного аппарата-планера длиной 3,5—4 м и водоизмещением около 1 т с глубиной погружения около 10 м.
Комментирует специалист
Сначала два небольших замечания. Первое: принцип подводного планирования известен, разумеется, давно. Еще в конце прошлого века им предполагал воспользоваться профессор Н. Е. Жуковский для организации пересылки почты с одного берега Женевского озера на другой с помощью подводного планера. Второе: все-таки вряд ли корректно считать движителем несущие поверхности, так как в этом случае понятие движителя расширяется до включения в него любой части судна, участвующей в движении.
Теперь, собственно, о самом планере.
Идея подводного планера, в этом я с вами согласен, является очень привлекательной и уже нашла применение: например, в устройстве параванов, траловых досок, якорей (см. «КиЯ» №133) и т. п. Явно неиспользованной и перспективной является область применения этой идеи для создания игрушек, что подтверждается вашими работами и авторскими свидетельствами.
Теперь об использовании идеи подводного планера для создания автономных подводных аппаратов. Если подобный аппарат, кроме режима планирования, будет способен двигаться и горизонтально, т. е. будет иметь еще и движитель, например гребной винт, то возражений против такого аппарата в принципе нет. Если у аппарата никаких движителей не будет, то отсутствие возможности двигаться горизонтально для него будет существенным недостатком, хотя, например, в случае туристского варианта, предназначенного для движения в режиме ныряния (погружение — всплытие — смена пассажиров), неспособность перемещаться горизонтально может оказаться не таким уж существенным недостатком.
Кстати, в упомянутом случае простота конструкции, отсутствие подвижных частей, а также двигателя (при наличии баллонов со сжатым газом) может сделать подобный проект конкурентоспособным по сравнению с обычной компоновкой подобного аппарата.
Однако, при этом нельзя согласиться с вашим утверждением, что для подводного планера надо затратить столько же работы, сколько для перемещения традиционного подводного аппарата на то же расстояние с той же скоростью за счет работы гребного винта. Изменение силы плавучести требует, например при всплытии, продувки сжатым воздухом балластных цистерн, а для набивки баллонов сжатым воздухом требуется использование компрессора, т. е. затраты энергии. Таким образом (так как КПД компрессора существенно ниже 100%) утверждать, что энергетически подводный планер окажется эффективнее подводного аппарата с гребным винтом, нельзя. КПД компрессора плюс потери в балластной системе надо определять с учетом особенностей конкретного проекта, но ориентировочно КПД компрессора вряд ли окажется выше 0,6, а с учетом потерь в балластной системе — не выше 0,5—0,6, что делает целесообразным использование идеи подводного планера только в специальных случаях, например, в рассмотренном выше случае ныряющего туристского подводного аппарата или для игрушек.
В заключение хочу привести один результат, относящийся к обсуждаемой проблеме. Оказывается, угол наклона траектории планирования к горизонтальной плоскости, обеспечивающий максимум скорости горизонтального перемещения аппарата, равен примерно 35°, а точнее, arcsin(1/√
При этом проекция скорости аппарата на горизонтальную плоскость Vгор определяется формулой:
если в нее подставить значение α = 35°.
В указанной формуле приняты следующие обозначения:
Y — модуль вертикальной силы плавучести, который считается постоянным в процессе рассматриваемого режима движения;
ρ — плотность жидкости;
Сх — коэффициент сопротивления движению аппарата вдоль траектории с учетом всех видов сопротивления, в том числе и индуктивного;
Ω — смоченная поверхность аппарата;
α — угол наклона траектории, которая считается прямолинейной, к горизонтальной плоскости.
Приведенный выше результат получен путем нахождения максимума по α от функции cosα√
Важно отметить, что качество планера, т. е. отношение силы, перпендикулярной к траектории, к силе сопротивления, обязательно равно 1/tgα (в случае α=35° качество равно всего 1,413). Если качество увеличивать, то α будет уменьшаться, а дальность горизонтального движения при заданной потере высоты (или глубины при всплытии) будет увеличиваться.