
Справедливости ради отметим, что, пожалуй, многих достижений и не было бы, если бы катеростроение не получило хорошую моторную базу. Возросли мощности подвесных моторов (за рубежом уже доступны моторы мощностью вплоть до 125—135 л. с.) и стационарных двигателей.
Благодаря применению угловых Z-образных колонок и повышению быстроходности двигателей существенно уменьшился вес стационарных установок. Если к началу шестидесятых годов средний удельный вес катерного бензинового двигателя мощностью около 150 л. с. составлял 5—6 кг/л. с. (без учета веса валопровода и руля), то сейчас вес колонки с двигателем такой же мощности в три-четыре раза меньше — всего 1,5 кг/л. с. А ведь для глиссирующего катера со 150-сильным двигателем экономия 500—600 кг нагрузки — это более 20% прироста скорости!
Примечательно, что раньше конструктор был озабочен чаще всего недостатком мощности двигательной установки для вывода катера на глиссирование. В качестве предельной нагрузки ему приходилось исходить из цифры 25 кг на каждую лошадиную силу мощности (при этом четвертая часть указанной предельной нагрузки приходилась на долю самого двигателя!). Теперь мощности возросли настолько, что не редкость и втрое меньшая нагрузка — 6—10 кг/л. с. В семидесятые годы все чаще обсуждается другая (хотя и не новая) проблема — реализации полной мощности механизмов катера на взволнованном море. Или, иными словами, как обеспечить способность катера идти на волне с возможно большей скоростью, приближающейся к его же скорости на тихой воде? По всей видимости, решение этой проблемы и станет главной задачей конструкторов на следующее десятилетие. Познакомимся же с ее существом и возможными путями ее конструктивного решения.
На практике любой водитель быстроходной лодки знает, что встреча с волной — это прежде всего удар носовой частью лодки о гребень. Когда же лодка рассечет волну, форштевень взлетает вверх или, как говорят те, кому приходится заниматься «скачками» по волнам не ради удовольствия, судно получает ускорение, направленное вверх. Чем выше скорость, тем сильнее удар, больше ускорение. А точнее, если вспомнить физику, сила удара прямо пропорциональна массе лодки и квадрату скорости.
Очевидно, что самые сильные удары лодка будет получать, идя навстречу волне — ведь тогда со скоростью хода лодки v складывается и скорость бега волны υв=1,25√λ, где λ — длина волны.
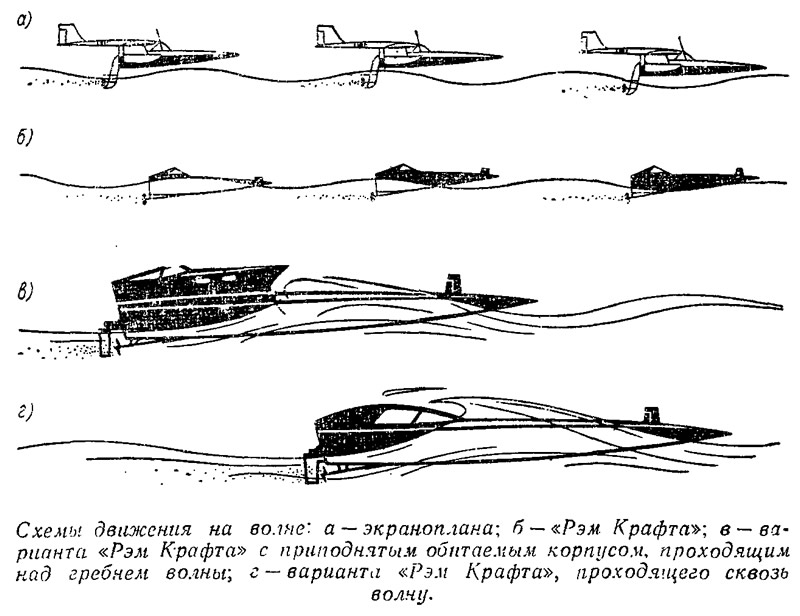
Пока длина волны мала, по сравнению с лодкой, ее корпус получает небольшие по величине, но часто повторяющиеся ускорения, качка незначительна. Такая картина характерна для короткой речной волны (рис. в), с которой глиссирующий катер легко справляется, если его корпус имеет в носу острые ватерлинии, большую килеватость шпангоутов и высоко поднятую скулу.
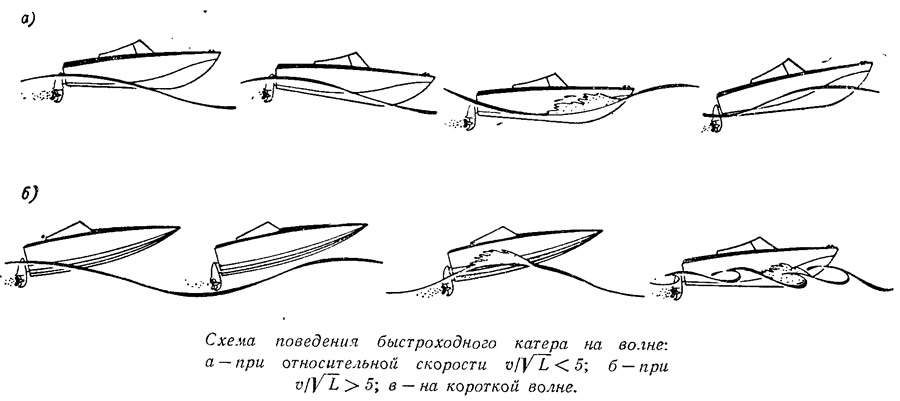
Иное дело, когда катер попадает на волну, длина которой больше, чем длина его корпуса. Так как такая волна имеет пологий склон, судно входит в нее сразу сравнительно большой площадью днища, получая мощный удар и большое ускорение. Гребень волны за доли секунды прокатывается под корпусом, и катер падает — носом или даже более плоской средней частью днища — на склон следующей волны. Этот, второй удар часто оказывается сильнее первого, так как к скорости встречи с волной добавляется еще и ускорение от качки катера (рис. а).
Однако и это — сравнительно легкая форма удара, характерная для средних скоростей υ/√L=4÷5 (45—60 км/час для десятиметрового катера). Действие удара направлено вверх, т. е. совпадает с направлением гидродинамической подъемной силы, благодаря которой катер глиссирует — скользит по воде с минимальной осадкой. При дальнейшем увеличении скорости сила удара уже в несколько раз превышает вес судна и легко выталкивает корпус целиком из воды (рис. б). Пролетев по инерции некоторое расстояние в воздухе, катер снова падает на воду. Ударные нагрузки и ускорения передаются на корпус и механизмы, неприятно воздействуют на экипаж и пассажиров; при этом возможны разрушения конструкций, срыв механизмов с фундаментов и другие аварии, о которых нередко упоминается в обзорах океанских гонок на моторных судах.
В зависимости от размеров волны и катера, обводов корпуса и скорости хода перегрузки могут достигать 10—20g (иногда сообщаются и более высокие цифры — до 25g). Напомним, что, говоря о перегрузках, мы имеем в виду отношение ускорения, получаемого центром тяжести катера, к ускорению свободно падающего тела (g=9,81 м/сек2) или, что то же самое, отношение силы удара к весу катера.
Вот эти-то перегрузки и заставляют снижать скорость катера при выходе на большую волну, вынуждают конструкторов и ученых непрерывно продолжать поиски новых обводов и даже новых типов быстроходных судов для открытого моря.
О том, что эти поиски небезуспешны, свидетельствуют хотя бы возросшие скорости катеров на океанских гоночных трассах, а также и то, что все больший процент от числа стартовавших катеров проходит дистанцию таких соревнований безаварийно. В 1961 г. победитель наиболее интересной традиционной океанской гонки по маршруту Каус — Торки показал среднюю скорость около 40 км/час; сейчас скорости призеров перевалили здесь за 100 км/час.
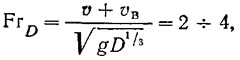
Сегодня ни у кого не вызывает сомнения, что гонки на волне (напомним — крупнейшие соревнования Каус — Торки — Каус и Майами — Нассау проводятся только при плохой погоде) стали исключительно привилегией катеров с сильно килеватыми обводами типа «глубокое V». Ведь еще при первых исследованиях явления удара глиссирующего корпуса о волну было установлено, что перегрузки на днище резко падают при увеличении угла внешней килеватости днища. И хотя изобретателем «глубокого V» считается американец Хант (1958 г.), справедливости ради отметим, что первый катер с обводами «моногедрон» при угле килеватости днища в кормовой части 28° был построен и испытан гораздо раньше — еще в 1912 г. Тем не менее, до последнего времени конструкторы придерживались традиционных обводов с плоским рабочим участком днища в корме.

Придерживались, пока всем не стало ясно, что при выходе в море и высокое гидродинамическое качество таких обводов, и повышение мощности двигателей бесполезны: все равно из-за сильных ударов о волну полную скорость поддерживать нельзя!
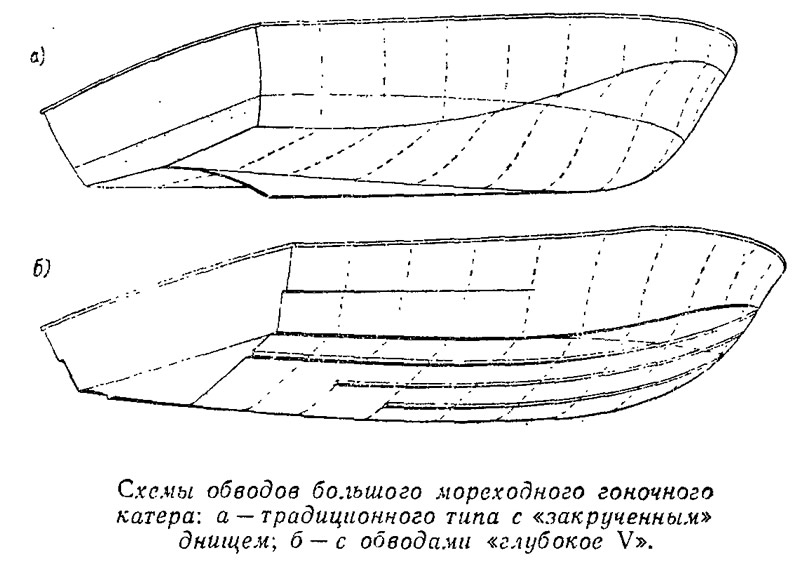
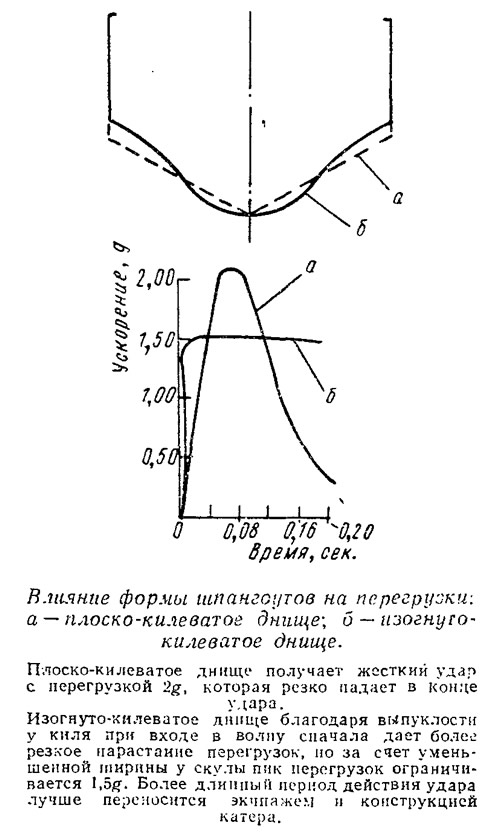
Эффект увеличения угла килеватости днища хорошо иллюстрируется приводимым графиком, построенным по результатам испытаний призматических глиссирующих моделей, соответствующих обводам типа «моногедрон» — с постоянной шириной по скуле и килеватостью от миделя до транца. Даже на сравнительно небольших скоростях:
при которых испытывались модели, увеличение килеватости днища с 5° до 20° обеспечивает снижение перегрузок с 15 до 6 g, или в 2,5 раза. Современные же катера ходят с более высокой относительной скоростью FrD=5÷8, когда перегрузки даже при обводах «глубокое V» (23°) достигают 20 g. Легко представить себе, что было бы в таких условиях с плоскодонным катером! Ведь килеватое — клиновидное днище входит в волну, испытывая со стороны воды гораздо меньшее сопротивление погружению, а само погружение происходит более плавно, что и уменьшает возникающие вертикальные ускорения.
Но тем не менее придется сделать вывод, что обводы типа «глубокое V» исчерпали свои возможности на спортивной арене и в семидесятые годы станут, по-видимому, достоянием уже серийных, «ширпотребовских» мореходных катеров. Дело в том, что днища многих высокоскоростных гоночных судов достигли килеватости 30—35° — дальше некуда!, а избавиться от гигантских скачков над водой и последующих падении на волну так и не удалось. Более того, такой характер движения попеременно то в воде (погружение), то в воздухе (полет) поставил перед конструкторами новые проблемы.
При взлете обнажаются движители и рули, прекращается действие упора винтов, двигатели начинают работать «в разнос», теряется контроль за лодкой. Нужно позаботиться о том, чтобы при последующем падении корпус катера, во-первых, вошел в поду с правильным дифферентом и без крена, а во-вторых, так, чтобы первыми коснулись воды гребные винты и рули. Правильный дифферент в момент вылета катера из воды задается при помощи «настраиваемых» на волну данного размера транцевых плит или балластных цистерн. Важное значение имеет п правильная аэродинамическая форма надводной части корпуса: большая площадь палубы в носу с сильным развалом бортов способствует максимальному смешению вперед точки приложения аэродинамической силы, действующей при полете, что и обеспечивает необходимый дифферент на корму в момент приводнения.
И все-таки, несмотря на успешное конструктивное решение этих и ряда других побочных проблем, скорость порядка 100 км/час при любом увеличении мощности пока остается предельной, сели речь идет о волне 1—5 баллов. Свои дальнейшие планы конструкторы скоростных катеров связывают уже не столько с совершенствованием известных форм корпуса, сколько с созданием новых типов судов, рассчитанных на то, чтобы парить над волной, или, наоборот, прорезать ее, не выходя в воздух.
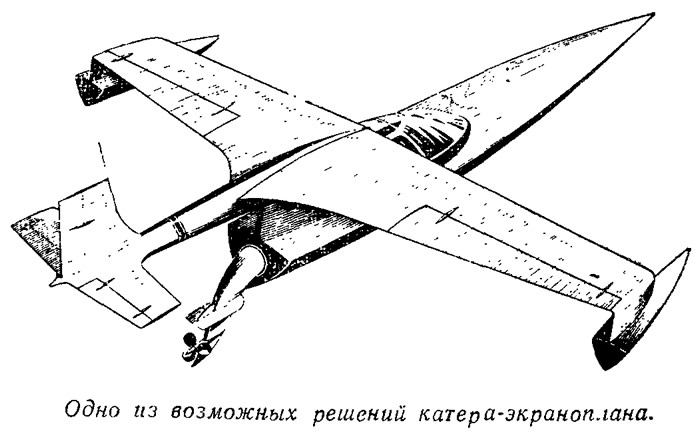
Первый из этих перспективных типов малых судов — «летающий катер», или экраноплан. Несущие плоскости, как у самолета, при разгоне поднимают экраноплан, и он летит на небольшой высоте, следуя профилю океанской волны. До основного корпуса будут доставать только гребни отдельных волн, которые корпус рассечет, как нож. Уточним, что в то же время экраноплан не должен отрываться далеко от воды — ведь приводить его в движение будут водяные гребные винты, расположенные на удлиненных колонках. Вряд ли конструкторы откажутся от водяных винтов в пользу воздушных, которые имеют меньший коэффициент полезного действия и очень большой диаметр, отличаются высокой тучностью при работе. Напомним, что водяной гребной винт создает максимальный упор 4—5 кг па каждую лошадиную силу мощности двигателя, а воздушный — всего 2—3 кг/л. с. Благодаря большему к. п. д. движителей, а также действию так называемого экранного эффекта катер-экраноплан потребует для движения со скоростью 120—150 км/час значительно меньшую мощность двигателя, чем самолет такого же веса.
Экранный эффект, т. е. существенное повышение давления воздуха на нижней поверхности крыла благодаря близости воды или мной экранирующей поверхности, проявляется при высоте полета, меньшей, чем хорда (ширина) профиля крыла. Отсюда можно сделать первый вывод, что действительно мореходный катер-экраноплан должен иметь большие размеры, чтобы хорда его крыла примерно вдвое превышала среднюю высоту расчетной волны. Другой вывод, усложняющий дело, заключается в том, что необходима достаточно чувствительная автоматическая система управления полетом по высоте, следящая за профилем волны; ведь экраноплан за секунду будет проходить 40—50 м, т. е. расстояние, равное длине большой волны. Но и без этого в создании катеров-экранопланов немало технических проблем, решение которых даже при современных темпах прогресса может занять все очередное десятилетие.
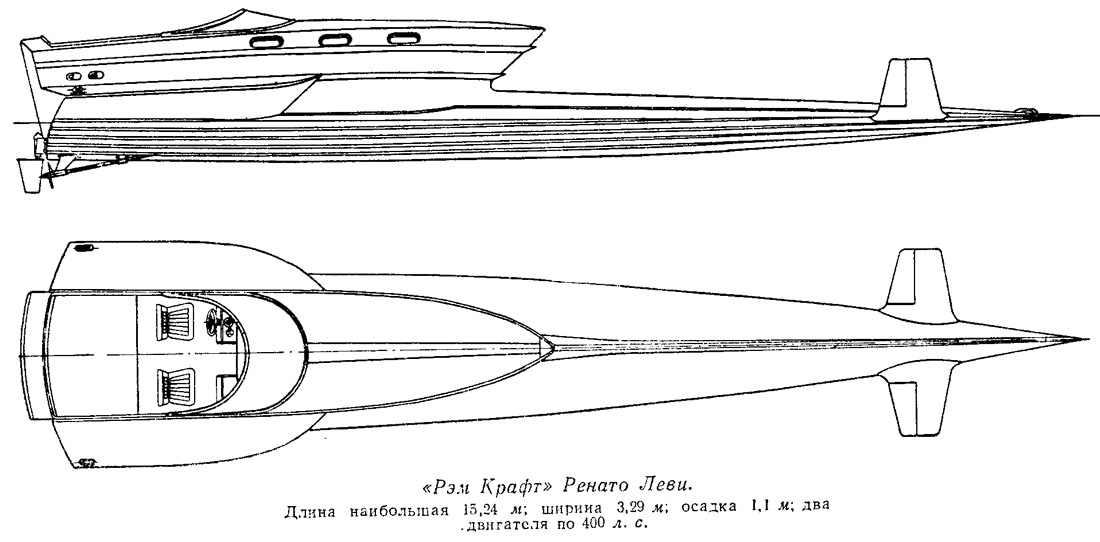
Более реальным представляется другой путь — развитие катеров, проходящих сквозь волну. Оригинальный проект судна подобного типа разработал известный итальянский конструктор скоростных катеров Ренаго Леви. По замыслу Леви, его «Рэм Крафт» не будет отрываться от воды даже при встрече с большой волной. Длинный, сильно заостренный нос катера «втыкается» в очередную волну и пронзает гребень, препятствуя выталкиванию судна из воды. В следующее мгновение уширенная кормовая часть корпуса, в которой расположены помещения для экипажа и пассажиров, встречается с уже разбитым носовой частью гребнем. Это «жилой» корпус может быть спроектирован и так, чтобы он оставался над гребнем волны или, наоборот, гребень свободно перекатывался через него.
Благодаря острому н узкому носу перегрузки при ударе о волну сравнительно невелики и плавно нарастают во времени. Сила ударов в кормовой части катера снижается за счет повышенной до 26° килеватости днища у транца.

Для движения «Рэм Крафта» потребуется, конечно, гораздо большая мощность двигателя, чем для полета экраноплана. Носовой «таран», не участвующий в создании подъемной силы, часто будет оказываться целиком под водой,, что увеличивает сопротивление движению; много энергии будет затрачиваться и на то, чтобы разбить гребень волны. Но, несмотря па это, Леви надеется, что даже располагая современными — «сегодняшними» техническими средствами, можно создать катер с расчетной скоростью до 200 км/час.
Как и быстроходные суда других типов, «Рэм Крафт» должен быть снабжен управляющей системой, обеспечивающей оптимальное положение корпуса к моменту встречи с волной. Для грубой дифферентовки катер предполагается снабдить балластной цистерной в средней части; более точно настраивать судно па таран волны будут небольшие подводные крылья с регулируемым углом атаки, расположенные в носовой части. Эти же крылья не дадут носу погружаться в воду, когда «Рэм» будет ее догонять, идя по ветру.
Мы уже отметили, что «Рэм Крафт» имеет необычно узкий корпус; отношение его длины к ширине L/B=7, в то время как у большинства современных глиссирующих катеров это отношение лежит в пределах 2,5—5,0. Легко сообразить, что чем уже корпус, тем меньше и его площадь, ударяющаяся о волну, тем плавнее нарастают перегрузки. В качестве примера можно привести такие данные: при угле килеватости днища 20° узкий катер (L/B=7) получает в 2,7 раза меньшие по величине перегрузки, чем широкий (L/B=5). Однако уменьшение ширины при обычной однокорпусной конструкции катера, имеющего к тому же повышенную килеватость днища, приводит к резкому уменьшению остойчивости. При косом или боковом курсе по отношению к бегу воли остойчивость узкого судна может оказаться недостаточной. Недаром Репато Леви предусмотрел на своем «Рэме» уширение корпуса у транца. Но, пожалуй, эффективнее другой путь — соединить два еще более узких корпуса в катамаран.
Для гонщиков, выступающих не в открытом море, а на закрытых трассах (на таких соревнованиях, как «Шесть часов Парижа» и др.), шестидесятые годы стали «эрой катамаранов». Ряд убедительных побед над однокорпусными катерами в крупнейших гонках, а также результаты исследований гидродинамики катамаранов свидетельствуют о больших возможностях судов этого типа.
Известно, что на широком корпусе обычного катера гидродинамическая подъемная сила достаточной величины (при глиссировании она практически равна весу судна) достигается при меньшей мощности двигателя и меньшем угле атаки, чем на узком. Эта сила выталкивает легкое гоночное судно из воды даже раньше, чем будет использована полная мощность мотора. Однако в этом случае движение его будет неустойчивым, он «шлепает» носом по воде (дельфинирует) и не развивает максимальной скорости. Узкие корпуса катамарана, наоборот, сначала требуют повышенной затраты мощности, но зато потом устойчиво глиссируют на более высокой скорости и с большим углом атаки. Кроме того, придавая мостику соответствующий аэродинамический профиль, можно «прижимать» нос катамарана к воде, еще дальше (т. е. до более высокой скорости) оттягивая момент достижения максимальной подъемной силы.
Можно ожидать, что большие глиссирующие катамараны благодаря повышенной остойчивости и малым перегрузкам при ходе на волне (разумеется, при условии, что днище мостика не касается воды) найдут применение не только на закрытых водоемах, но и в море. По мнению конструкторов, занимающихся проектированием морских катеров, для этого должны быть решены три основные задачи:
- 1) размещение механизмов, оборудования и жилых помещений в узких корпусах (при L/Bкорп=7÷12);
- 2) обеспечение прочности соединительного мостика, подвергающегося большим изгибающим и скручивающим динамическим нагрузкам;
- 3) отработка аэродинамики судна.
На скоростях, превышающих 100 км/час, на поверхностях соединительного мостика под действием встречного потока воздуха образуется солидная подъемная сила. В случае внезапного увеличения угла атаки, например, при ударе волны, эта сила может привести к отрыву катамарана от воды и даже опрокидыванию. Поэтому на сравнительно легких скоростных катамаранах площадь мостика будет, очевидно, сведена до минимума или ему придадут специальную профилировку для нейтрализации — гашения аэродинамической подъемной силы, что делается уже и сейчас на некоторых гоночных катамаранах для предотвращения опасного взлета.
На тяжелых судах мостик, наоборот, необходимо использовать для частичной разгрузки корпусов и уменьшения их сопротивления, т. е. создавать на мостике подъемную силу.

В одном из американских «перспективных проектов», условно рассчитанном на реализацию к 1990 г., под мостик 20-метровой двухкорпусной моторной яхты предполагается нагнетать воздух. Пространство между корпусами спереди и сзади будет закрыто гибкими ограждениями и благодаря местному повышению давления воздуха под мостом катамаран поднимется на 1 м, что наполовину уменьшит осадку. На создание воздушной подушки предполагается затрачивать 250 из 2000 л. с. мощности двух газовых турбин, работающих на гребные винты.
Говоря о тяжелых глиссирующих судах, следует упомянуть и о новых модификациях реданных обводов как средстве снижения перегрузок при умеренной мощности механизмов. Поперечный редан, как известно, позволяет распределить возникающее на днище гидродинамическое давление на две площадки — у редана и близ транца. Благодаря этому повышается гидродинамическое качество (так как удлинение b/l каждой из этих площадок становится ближе к оптимальному, чем одной общей), уменьшается смоченная поверхность днища, центр тяжести катера может быть расположен ближе в нос. Следовательно, корпус с поперечным реданом может быть сделан уже (с соотношением L/В=6÷8), но с тем же гидродинамическим качеством, что и широкий. А ведь уменьшение ширины в сочетании с повышенной килеватостью обеспечивает более комфортабельный ход на волне.
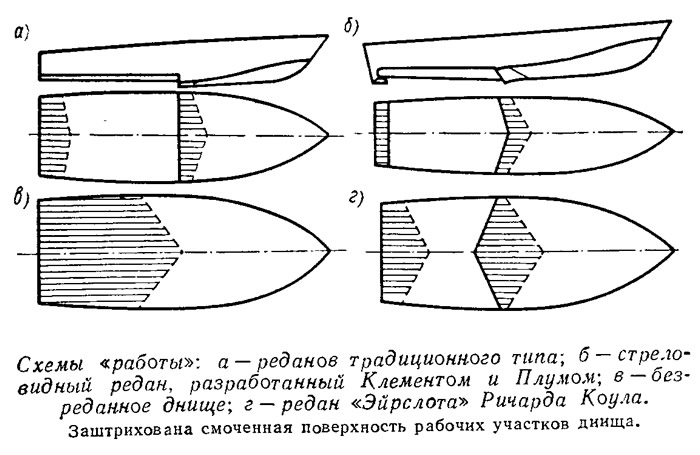
Ранее — еще 30—50 лет назад — реданные обводы заслужили прочную репутацию немореходных, так как днище у редана, расположенного посередине корпуса, выполнялось совершенно плоским, редан имел большую высоту (равную обычно 1/20 ширины днища), что вызывало повышение ходового дифферента на корму, отсутствовали устройства для регулирования дифферента в зависимости от погодных условий. Ясно, что такие реданные катера испытывали очень сильные удары о встречную волну даже при малой ее высоте.

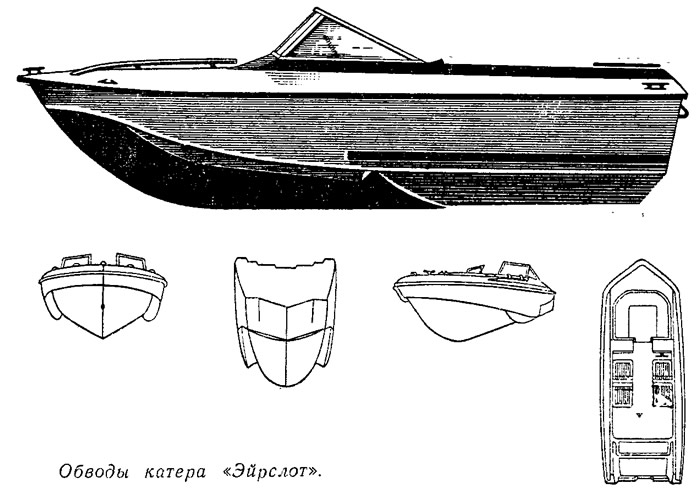
Одна из многообещающих модификаций современных реданных обводов «Эйрслот» создана американцем Ричардом Коулом — изобретателем обводов типа «кафедрал» (1958 г.). На килеватом днище (около 20°) его катера имеется невысокий «поперечный» редан, расположенный, однако, не перпендикулярно ДП, а в виде треугольника-клина (в плане), развернутого вершиной в корму. Такое расположение более эффективно, так как реданы на бортовых половинах днища становятся перпендикулярными потоку воды, обтекающему килеватое днище не вдоль ДП, а наискось, к скуле. Кроме того, удар о волну происходит меньшей площадью, чем на катерах с поперечными реданами старого типа. Для свободного прохода воздуха в зареданную область бортовые спонсоны обрываются близ редана.
Фирма «Уэллкрафт», выпускающая катера с такими обводами днища (длина корпуса от 4,8 до 7,5 м; двигатели мощностью 125—250 л. с.), рекламирует их, очевидно, не без оснований как «самые спокойные на волне».
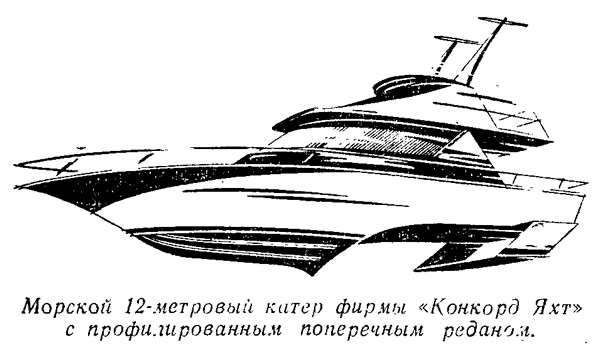
В перспективном проекте американского катера фирмы «Конкорд яхт» развита идея профилированного стреловидного редана, разработанного в Тейлоровском опытовом бассейне Клементом и Плумом. Они использовали давно известный эффект продольной профилировки вогнутого глиссирующего днища: в точке встречи с водой угол атаки мал, поэтому, в отличие от плоской пластины, здесь не получается удара и брызг, не нарушается плавное течение воды. Благодаря продольному изгибу днища, из-за ускорения потока возникает центробежная сила, сглаживающая пик давления на границе встречи с водой и дающая дополнительный прирост подъемной силы (по данным испытании — примерно па 35%). Другой эффект от продольной профилировки редана — намного увеличивается длина зареданной воздушной полости, уменьшается смоченная поверхность.
Высота стреловидного редана, применяемого на днище с килеватостью 12—20°, примерно вдвое меньше обычного, однако обязательным дополнением к редане должно служить какое-либо устройство для регулировки дифферента. В данном проекте это — суперкавитирующее подводное крыло, установленное у транца. Оно песет 12—14% веса катера, остальное приходится уже на долю самого редана. Хорда крыла около 800 мм; в кормовую кромку его встроены элероны, изменяя угол наклона которых можно регулировать подъемную силу крыла, а следовательно, глубину его погружения и общий дифферент катера. Вертикальные стойки имеют рули поворота, используемые на малой скорости, когда крыло погружено о воду.

Две газовые турбины мощностью по 500 л. с. с водометными движителями выведут этот 12-метровый катер на глиссирование со скоростью 90 км/час — конструкторы рассчитывают получить гидродинамическое качество катера более 10 (напомним, что на глиссирующих катерах обычного типа оно равно 4—6).
Важно отметить, что стреловидная форма редана значительно снижает перегрузки на волне, поскольку площадь (и сила) гидродинамического удара нарастает, начиная с вершины редана, не так резко, внезапно, а в течение некоторого, хотя и небольшого периода времени.
В этом обзоре мы познакомились только с одной — важнейшей проблемой дальнейшего развития быстроходных катеров, проблемой повышения их мореходности, ибо под этим сейчас понимается способность катера поддерживать проектную скорость на волнении. В семидесятые годы судостроители будут работать и над принципиально новыми путями повышения скорости судов — применением воздушной смазки, полимеров, дальнейшим совершенствованием судов па подводных крыльях и воздушной подушке. Однако если говорить обо всем этом применительно к малым катерам, то они еще далеки от пробы своих возможностей в открытом море.