
В реальных условиях эксплуатации встречается несколько значений нагрузки и положений центра тяжести (ЦТ), поэтому оптимальная ширина глиссирования будет изменяться в широких пределах, вплоть до максимальной ширины днища по скуле. Определение этой величины необходимо еще в процессе разработки проекта катера, чтобы заранее рассчитать ширину установки продольных реданов, уступов или других брызгоотсекающих кромок, обеспечивающих отрыв потока от поверхности днища, не участвующей в создании гидродинамической силы поддержания.
Для прямого решения поставленной задачи использование известных расчетных методов затруднительно из-за необходимости выполнения ряда последовательных приближений, так как скорость и ширина глиссирования заранее неизвестны.1
Форма смоченной поверхности современных остроскулых корпусов на режиме глиссирования, как известно, близка к призматической, т. е. имеет почти постоянную ширину и килеватость при наличии прямых линий батоксов. Угол килеватости обычно задается конструктивно, поскольку его выбор связан с определенным компромиссом, обусловленным стремлением получить более высокое гидродинамическое качество на тихой воде и одновременно обеспечить надлежащую мореходность с минимальными ударными перегрузками при движении на волнении. Кроме того, наличие килеватости благоприятно сказывается на управляемости и поворотливости катера.
Результаты испытаний, выполненных в опытовых бассейнах с плоско-килеватыми призматическими поверхностями, могут использоваться для гидродинамического расчета глиссирующих корпусов.
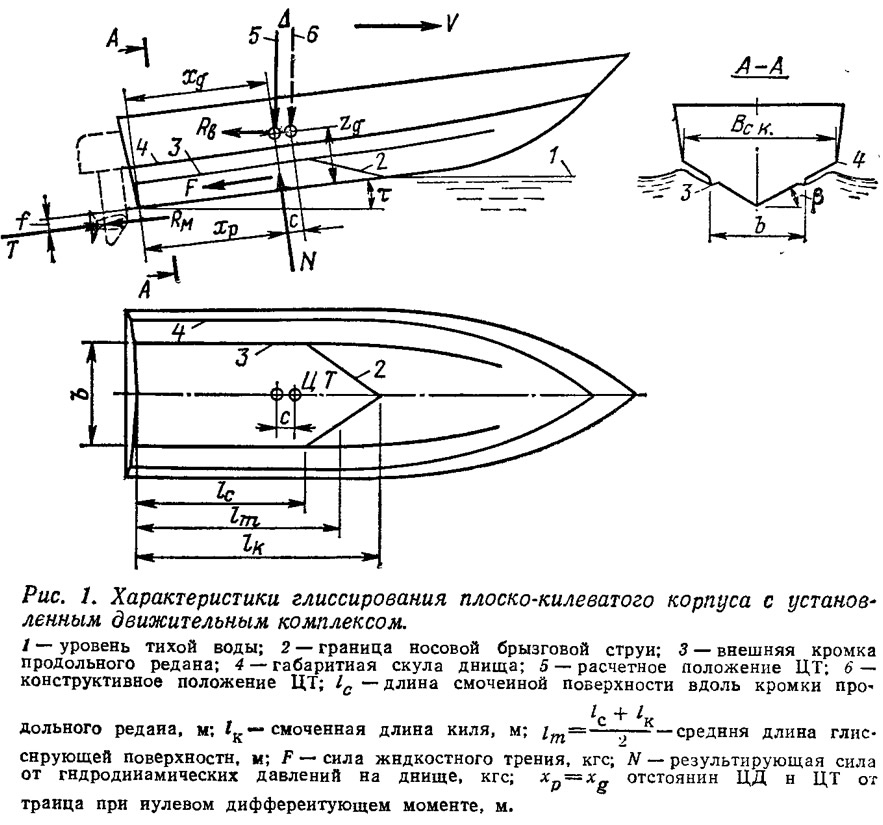
Рассмотрим систему сил, действующих на реальный глиссирующий корпус (рис. 1), приводимый в движение гребным винтом подвесного мотора или угловой колонки. При этом допустим, что векторы упора Т и гидродинамического сопротивления подводной части подвесного мотора соосны и параллельны килю, а линия действия аэродинамического сопротивления RM проходит через ЦТ, который первоначально расположен над предполагаемым центром давления (ЦД).
Относительное сопротивление ε (или обратное качество) плоско-килеватой глиссирующей поверхности выражается известной формулой

где RГК — сопротивление глиссирования голого корпуса (без выступающих частей), кгс;
— коэффициент подъемной силы, в котором ρ = 102 кгс·с2/м4; К — скорость, м/с;
λ = lm/b — относительное удлинение смоченной поверхности; ks — коэффициент, учитывающий режим обтекания смоченной поверхности и влияние носовой брызговой струи.
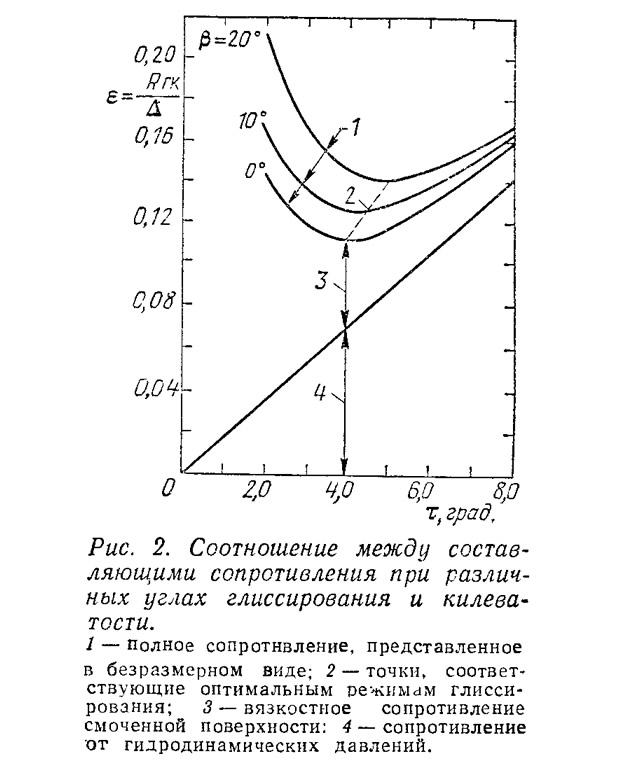
Первое слагаемое в (1) представляет сопротивление от гидродинамических давлений на днище, а второе — характеризует силу трения. На рис. 2 показано типичное соотношение между указанными составляющими в зависимости от угла глиссирования и килеватости днища.
Задача заключается в определении элементов глиссирования, соответствующих минимуму ε, имеющему место при всех углах килеватости.
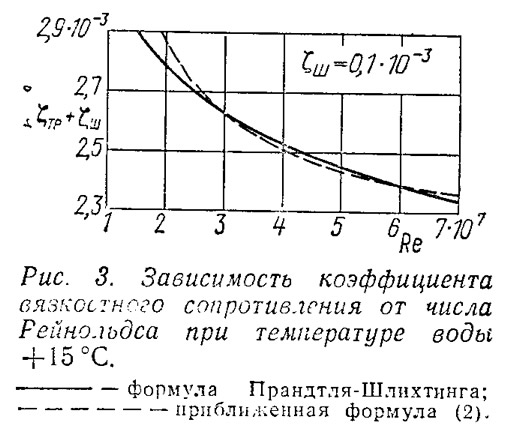
Суммарный коэффициент вязкостного сопротивления (ζТР+ζШ) в диапазоне чисел Рейнольдса
(рис. 3), охватывающем возможные скоростные режимы малых глиссирующих катеров, выразим следующей приближенной формулой:

в которой принято: ζШ=0,1·10—3;
v = 1,141·10—6 м2/с.
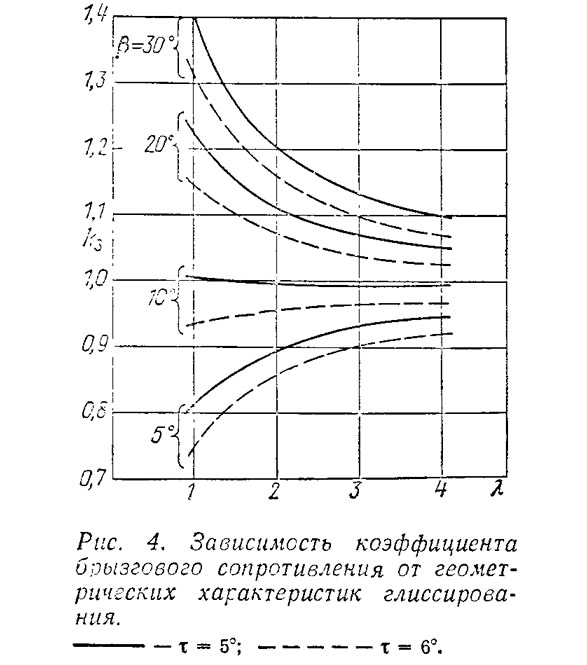
Множитель ks в (1), графически представленный на рис. 4, при β≥10° достаточно надежно аппроксимируется формулой

где β и τ выражены в градусах.
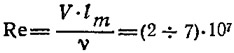
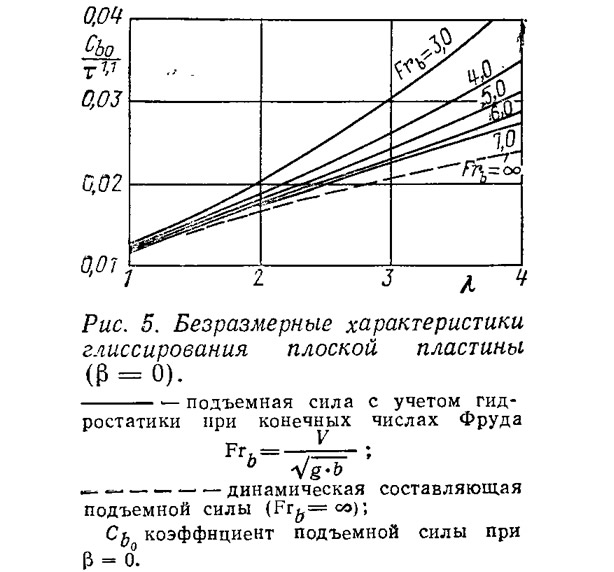
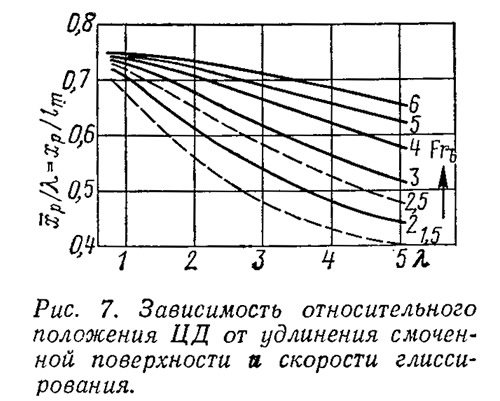
Для аналитического выражения А. входящего в (1) и (3), воспользуемся полуэмпирическими зависимостями (рис. 5, 6, 7), полученными А. Мюррэем (1950 г.) и Д. Савицким (1964 г.) и связывающими в безразмерном виде подъемную силу и положение ЦД плоско-килеватых глиссирующих пластин с их геометрическими и скоростными характеристиками.
После аппроксимации кривых на рис. 5, 6 и 7 в практическом диапазоне

и выполнения аналитических преобразований (1) с учетом (2) и (3) находим оптимальный угол глиссирования

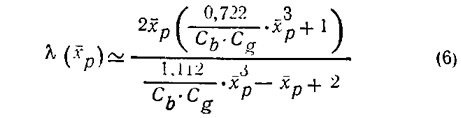
и далее — оптимальное удлинение смоченной поверхности

удлинение, зависящее от положения ЦД (рис. 7),
и, наконец, минимум относительного сопротивления
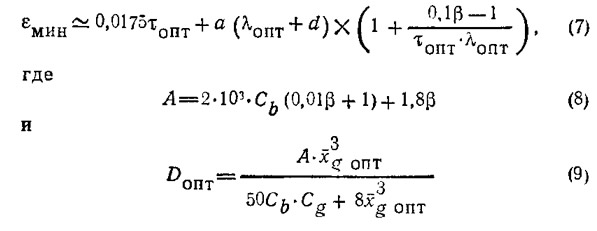
— вспомогательные параметры;

— безразмерный коэффициент продольной центровки (λ = 1000 кгс/м3);
Оптимальное значение
входящее во вспомогательный параметр (9), можно определить, полагая

при
Для каждого угла килеватости можно затем построить график

аналогичный представленному на рис. 8 для β=13°.
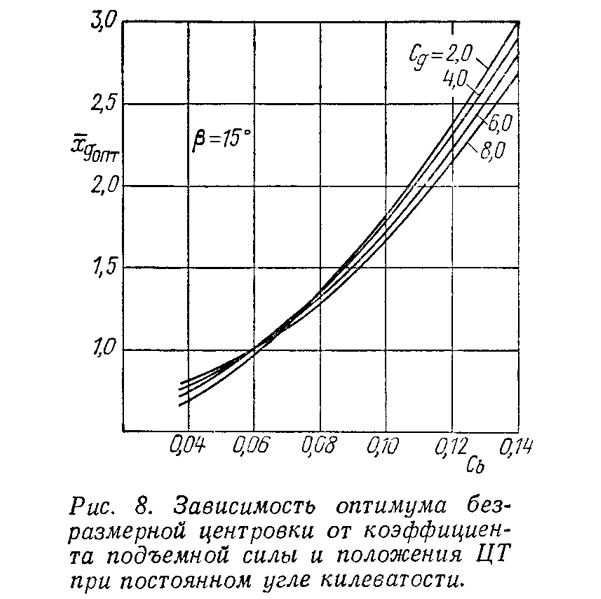
По результатам графоаналитической обработки серии указанных кривых, построенных в диапазоне β=10÷25°, получена простая ключевая формула для определения оптимума

Зная проектные величины Cg и β и задаваясь рядом Cb, при помощи (13) легко найти
В качестве иллюстрации на рис. 9 приведена расчетная диаграмма оптимальных характеристик глиссирования в осях εмин—
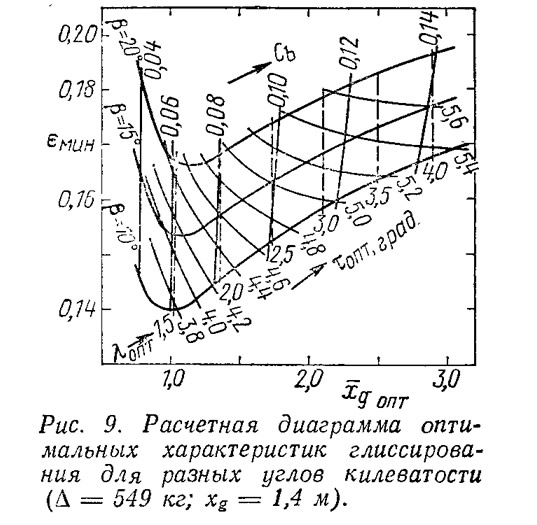
После расчета и построения кривой εмин для выбранного β на ней необходимо найти точку, соответствующую заданной мощности двигателя N (л. с.) и ожидаемому пропульсивному КПД η, учитывая при этом наличие сопротивления г — суммы сопротивления выступающих частей и аэродинамического сопротивления.
Поставленное условие можно выразить следующим образом:

где R — полное сопротивление, кгс;
ζ = ζм + ζа — коэффициент суммарного сопротивления выступающих частей и воздушного потока.
Выражая V через в форме
и учитывая, что b=xg/
Если подставить в (15) сочетания Cb и
При распределении сил, показанном на рис. 1, неизбежно появление момента в продольной плоскости, вызывающего дополнительный дифферент ка корму, т. е. отклонение от оптимума τ. Действие этого момента необходимо компенсировать либо конструктивным наклоном оси вращения гребного винта относительно киля, либо смещением ЦТ в нос на величину с относительно расчетного положения ЦД:

где f — заглубление оси гребного винта, zg — возвышение ЦТ над килевой линией.
При использовании водометного движителя величина указанной поправки может оказаться намного меньше, так как линяя тяги проходит выше киля.
В рассматриваемом случае вертикальной составляющей упора можно пренебречь, допуская при этом cos τ ≈ 1. Корректировка положения ЦТ выполняется после определения составляющих RM и F полного сопротивления R ≈ T. В связи с малой величиной этой поправки ее легко реализовать на практике за счет незначительного перераспределения составляющих нагрузки по длине.
Смоченную длину киля при глиссировании на расчетном режиме (рис. 1) можно определить по формуле

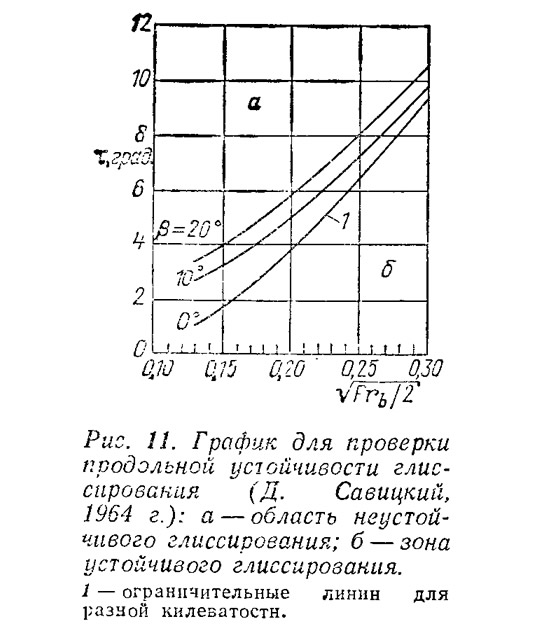
Наконец, важным моментом при уточнении продольной центровки катера является обеспечение продольной устойчивости движения на расчетном режиме. Такой контроль можно осуществить с помощью графика (на рис. 11) или же по формуле, сообщающей результаты модельных испытаний при β=0÷21°;

При расчете по формуле (15) может возникнуть вопрос, какие величины η и ζ следует принимать? В случае использования подвесного мотора или угловой колонки с оптимально спроектированным гребным винтом можно принять η= 0,55÷0,6 в зависимости от качества обработки лопастей винта и подводной части мотора. Для водометного движителя эффективный КПД будет несколько ниже и обычно составляет η=0,45÷0,5 в зависимости от правильности подбора элементов водопроточной части и рабочего колеса, однако снижение КПД в этом случае компенсируется отсутствием выступающих частей, которые, как отмечено выше, могут составлять значительную долю полного сопротивления.
По данным гидродинамических испытаний подвесных моторов, коэффициенты сопротивления их подводной части имеют следующие значения: ζМ=0,135 для моторов «Вихрь-25» и «-30» и ζМ=0,175 для моторов «Нептуи-23».
Коэффициент аэродинамического сопротивления выражается в зависимости от площади лобового сечения корпуса и может оцениваться величиной ζа=0,035 Sлоб, где Sлоб в м2.
Расчет элементов глиссирования выполняется в следующем порядке:
1. В результате проработки общего расположения задаются Δ, β, xg, N, η и вычисляется Сg в соответствии с (10), а также устанавливается ряд возрастающих значений Cb=0,04÷0,4, например, с интервалом 0,02.
2. Рассчитывается
3. Определяются А и Dопт по формулам (8) и (9) для каждого из полученных в п. 2 сочетаний Cb и
4. Рассчитываются τопт и затем λопт по формулам (4) и (5).
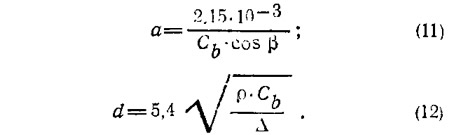
5. После вычисления a и d по формулам (11) и (12) с учетом результатов п. 4 рассчитываем кривую εмин при каждом
6. Строим график оптимальных значении ε, λ, τ и Cb в функции от
7. Производим вычисление ε по формуле (15), подставляя в нее сочетания
8. Далее определяем остальные характеристики глиссирования:
и lк по формуле (17).
9. Зная ε, Δ, ζ и V, рассчитываем полное сопротивление глиссирования R=εΔ+ζV2, равное необходимому упору Т гребного винта, и проверяем замкнутость решения на основе равенства (14).
10. Находим сопротивление трения F=R—0,0175τ·Δ—ζ·V2 и производим корректировку положения ЦТ по формуле (16).
11. Выполняем контроль продольной устойчивости глиссирования по графику (рис. 11) или формуле (18).
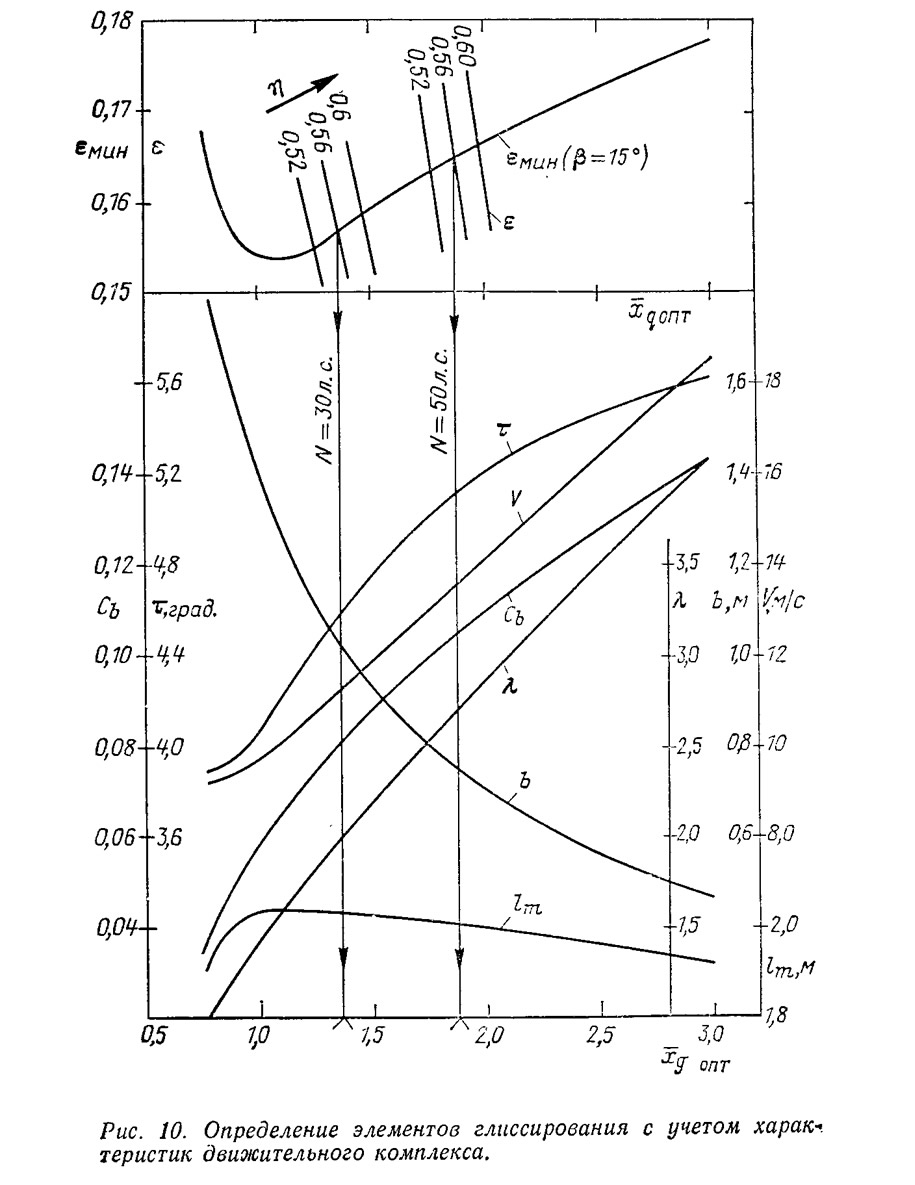
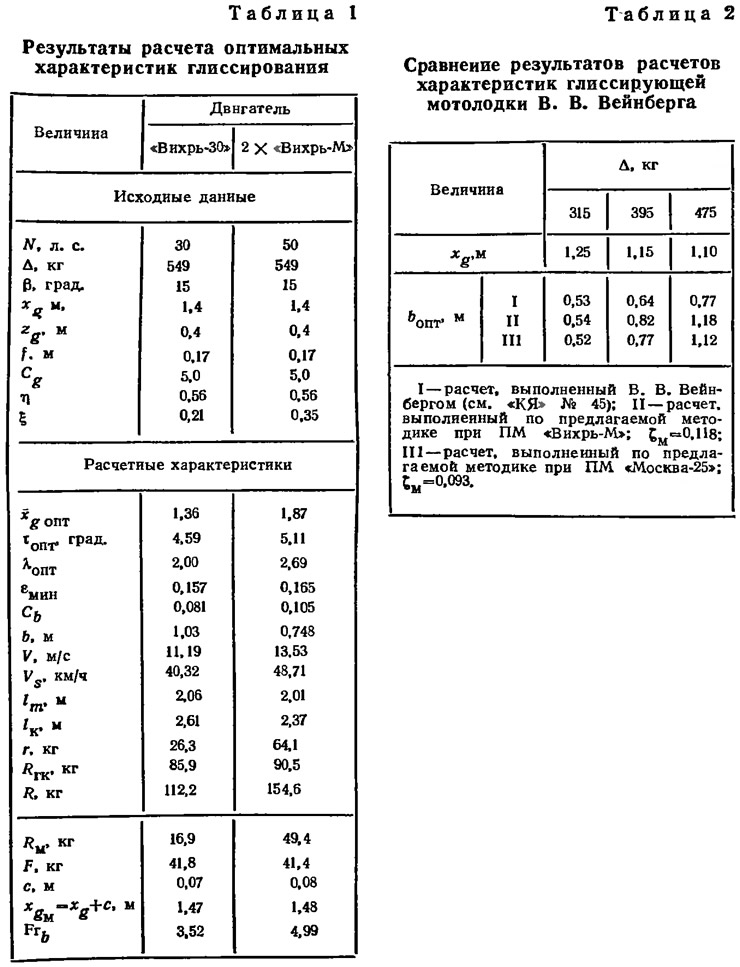
В качестве примера на рис. 10 и в табл. 1 представлены результаты расчета оптимальных характеристик глиссирования для катера весом 549 кг при β=15° и xg=1,4 м. Рассмотрены два варианта энерговооруженности: с одним мотором «Вихрь-30» и с двумя моторами «Внхрь-М» при η=0,56.
Сравнение полученных расчетных данных показывает, что при двухмоторном варианте увеличение мощности почти на 67% приводит к повышению скорости всего на 21%. Доля сопротивления выступающих частей в этом случае значительно возрастает и составляет более половины сопротивления голого корпуса и почти одну треть полного ходового сопротивления. Следовательно, с точки зрения расхода топлива выигрыш в скорости за счет повышения энерговооруженности не всегда оправдан и требует специального обоснования с учетом характеристик движительного комплекса и величины передаваемой мощности.
Представляет интерес, насколько элементы глиссирования, рассчитанные предлагаемым методом, будут отличаться от характеристик натурных проектов, ранее опубликованных в журнале. С этой целью был выполнен сравнительный расчет для трек вариантов нагрузки и центровки на примере мотолодки, спроектированной и испытанной В. В. Вейнбергом (см. «КЯ» №44). Для оценки влияния формы выступающих частей моторов на величину скорости рассмотрены варианты с подвесными моторами «Вихрь-М» и «Москва-25», имеющими одинаковую мощность N=25 л. с., но отличающимися сопротивлением подводных частей (см. рис. 20 в №44). Исходные да иные и результаты расчета при η=0,6 приведены в табл. 2 и на рис. 12. Видно, что расчетная скорость мотолодки (β=21°) с мотором «Москва-25», определенная предлагаемым способом, близка к скорости натурного образца. При установке мотора «Вихрь-М» скорость хода несколько снижается из-за увеличения сопротивления подводной части мотора при той же мощности.
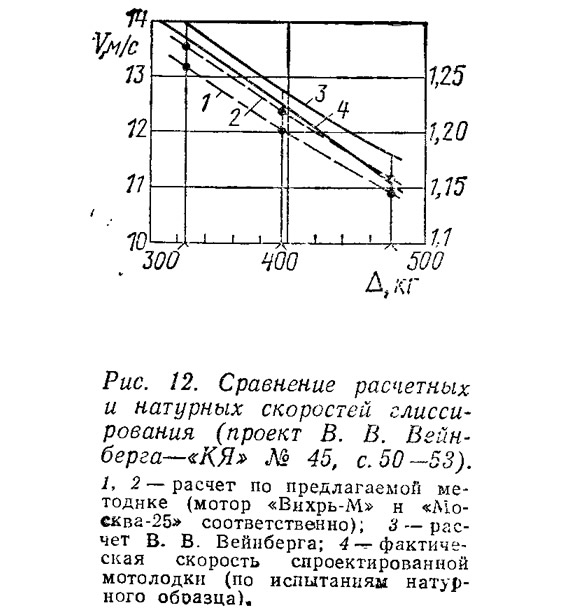
Однако ширина глиссирования, указанная В. В. Вейнбергом, меньше ширины, рассчитанной предлагаемым методом. Это отличие можно частично объяснить несколько завышенной скоростью в расчете В. В. Вейнберга, где не учтено воздушное сопротивление корпуса и влияние масштаба на гидродинамическое качество глиссирования.
Расчеты по предлагаемой методике позволяют решать и ряд задач при эксплуатации лодки. Так, расчет оптимальных характеристик глиссирования, выполненный для серийной мотолодки «Днепр» (Δ=660 кг; β=14°) с ПМ «Вихрь-30», позволил проанализировать роль центровки и повышения КПД движительного комплекса. Изменение хg с 1,4 до 1,6 при η=0,58 дает изменение скорости с 38,5 до 38,9 км/ч при уменьшении R=Т со 121,9 до 120,7 кгс. Повышение η до 0,60 сразу же повышает скорость на 1 км/ч при некотором возрастании R=Т со 121,9 до 122,6 кгс при xg=1,4 и т. д. Расчетная ширина глиссирования во всех случаях получалась меньше, чем конструктивная ширина днища «Днепра» по скуле. Имеющийся запас ширины позволяет несколько увеличивать нагрузку без значительного падения скорости.
Примечания
1. См. также статью В. В. Вейнберга «Глубокое V: за и против» в «КЯ» №44, в которой подробно описывается физика явлений.