Это объясняется тем, что силы, поддерживающие судно (архимедова сила поддержания, гидродинамическая подъемная сила) и оказывающие сопротивление движению (сопротивления трения, волновое, вихревое), изменяют свою величину на каждом из трех режимов по различным законам гидродинамики. Смена этих законов происходит не внезапно — на границах режимов, — а постепенно и притом то быстрее, то медленнее; поэтому сопротивление и положение судна на воде (осадка и дифферент) также изменяются постепенно, с ускорениями и замедлениями. Как видно на рис. 1, при смене режима плавания переходным рост сопротивления замедляется, а в дальнейшем — при выходе на режим глиссирования — вновь ускоряется.
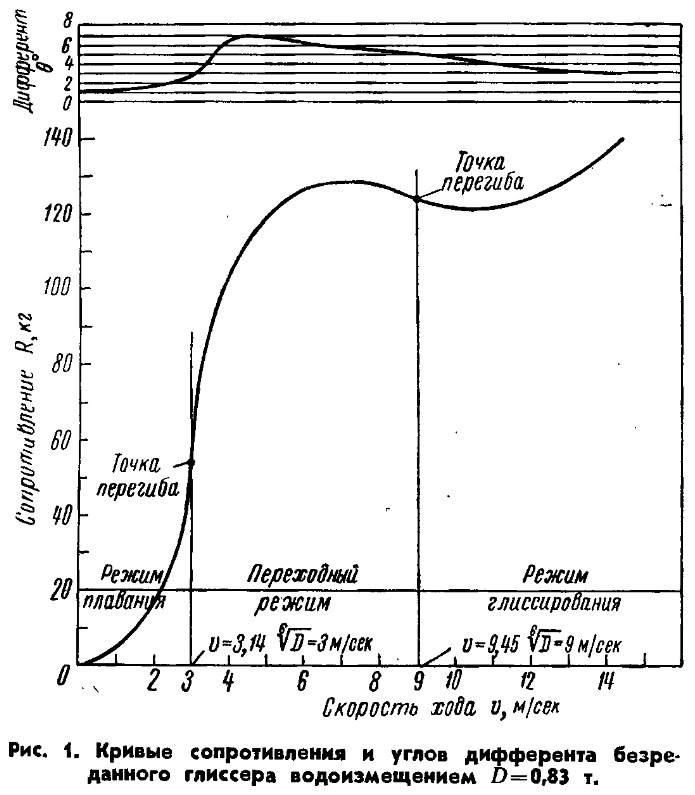
При движении судна на режиме плавания, как это видно из рис. 1, дифферент меняется незначительно; затем, в начале переходного режима он сильно возрастает, после чего снова медленно падает.
По мере увеличения скорости, на режиме глиссирования угол дифферента продолжает уменьшаться. Средняя начальная (на стоянке) осадка за время прохождения судном всех режимов уменьшается в несколько раз.
Одновременно со сменой режимов меняется и картина волнообразования при движении судна. Спокойное волнообразование при движении судна на режиме плавания по мере приближения к переходному режиму постепенно сменяется бурным волно- и брызгообразованием, создаваемым носовой частью днища; одновременно с этим вода полностью отрывается сперва от транца, а затем и от бортов судна. Для режима чистого глиссирования характерны сравнительно слабые волны, но из-под днища вырываются сильные струи и брызги.
Если судно, предназначенное для глиссирования, спроектировано правильно И располагает двигателем достаточной мощности, то можно легко вычислить скорости хода, при которых будут происходить смены режимов, по формулам:
В этих уравнениях скорость υ выражена в метрах в секунду, а водоизмещение V — в кубических метрах.
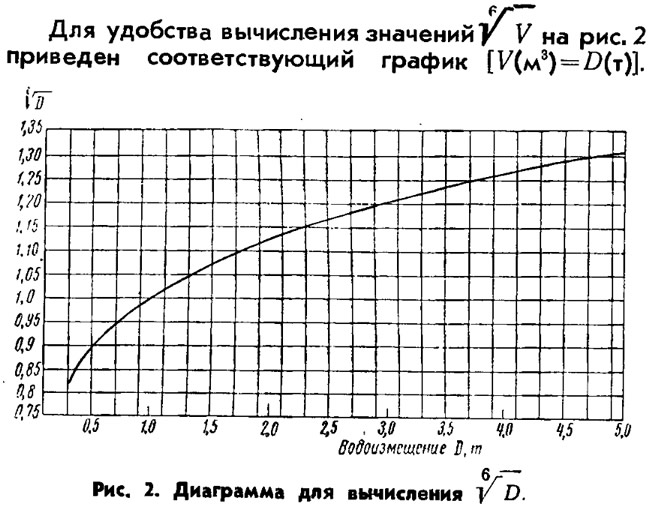
Рис. 2
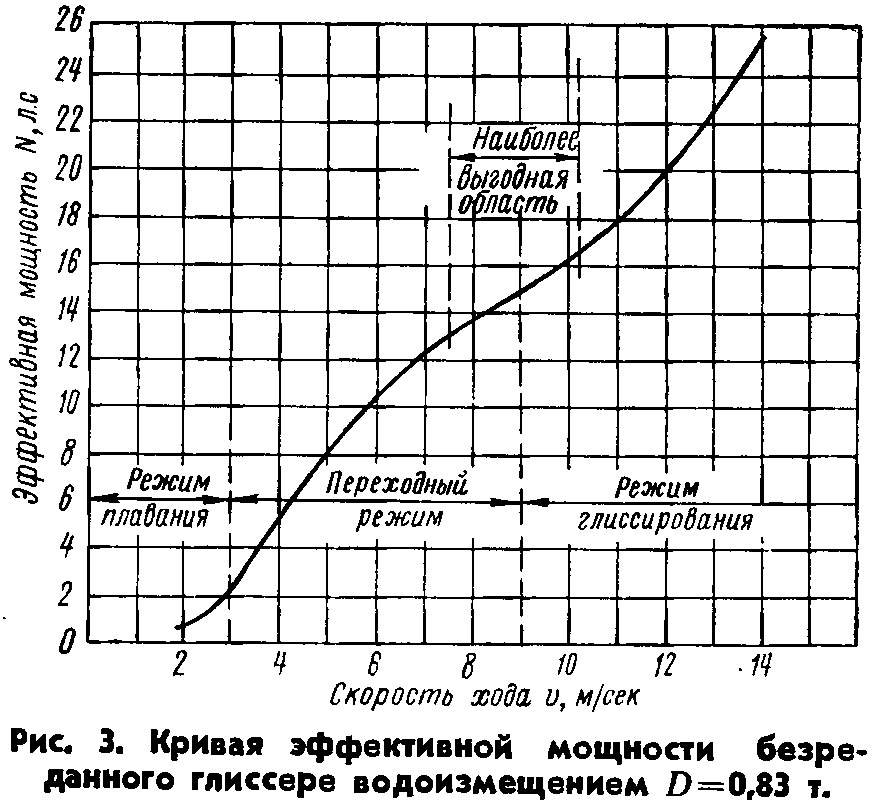
На рис. 3 дана диаграмма изменения мощности, требующейся для преодоления сопротивления движению одного из реальных глиссеров (V=0,83 м3) на различных режимах движения. Из этой диаграммы видно, что наиболее экономичной является область конца переходного режима и начала режима глиссирования (скорости от 7,5 до 10 м/сек); для повышения скорости на 1 км/час здесь требуется меньший прирост мощности, чем в других областях. Наиболее невыгоден режим плавания: мощность растет очень быстро, хотя абсолютное ее значение относительно невелико. Режим глиссирования на больших скоростях по степени возрастания мощности при увеличении скорости хода является средним между режимами плавания и переходным.
Однако при проектировании судов приходится учитывать не только экономичность режима движения, но и многие другие факторы: требующуюся скорость хода, мореходность, невозможность установить двигатель необходимой мощности и т. д.
Поэтому, если одни суда предназначаются для движения на режиме плавания, то для других расчетным является переходный режим, а для третьих — режим глиссирования. При этом каждому судну придают обводы, позволяющие ему квк можно лучше использовать особенности заданного режима и затрачивать благодаря этому возможно меньшую удельную мощность, т. е. мощность, приходящуюся на каждый килограмм водоизмещения.
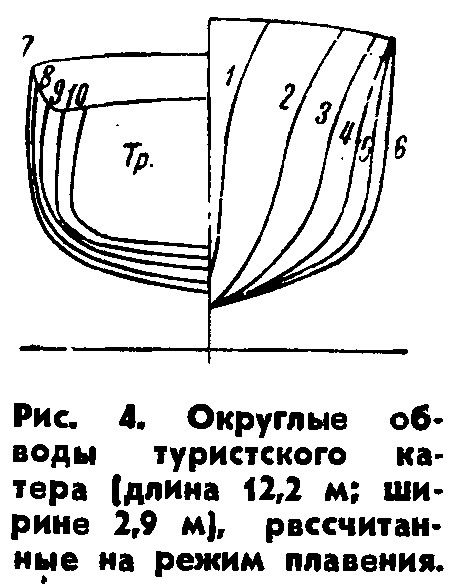
Для режима плавания наиболее рациональны так называемые круглодонные (круглоскулые) обводы (рис. 4), обеспечивающие хорошо обтекаемую форму корпуса судна и рассчитанные только на архимедову силу поддержания.
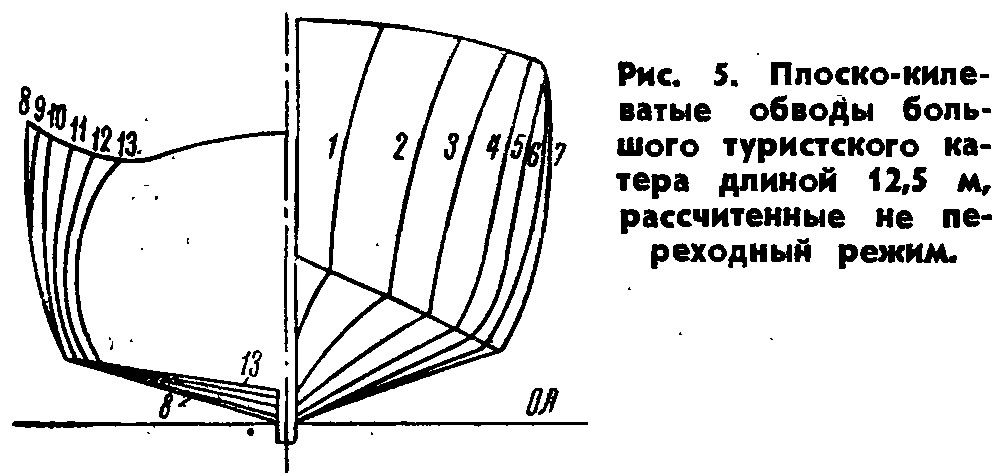
Судам, предназначенным для движения на переходном режиме, часто придают плоскокилеватые обводы (рис. 5), имеющие большую килеватость, транцевую корму и острые скулы по всей длине. Для судов, рассчитанных на этот режим движения, применяются также комбинированные обводы: плоскокилеватые в корме и округлые в носовой части. На судах с такими обводами к архимедовой силе поддержания по мере роста скорости хода прибавляется гидродинамическая подъемная сила, ввиду чего судно на ходу частично вытесняется из воды, причем его борта почти не обтекаются водой.
Обтекание днища на переходном режиме происходит частично вдоль днища и частично — поперек. Общее направление обтекания — под углом, от киля к скулам.
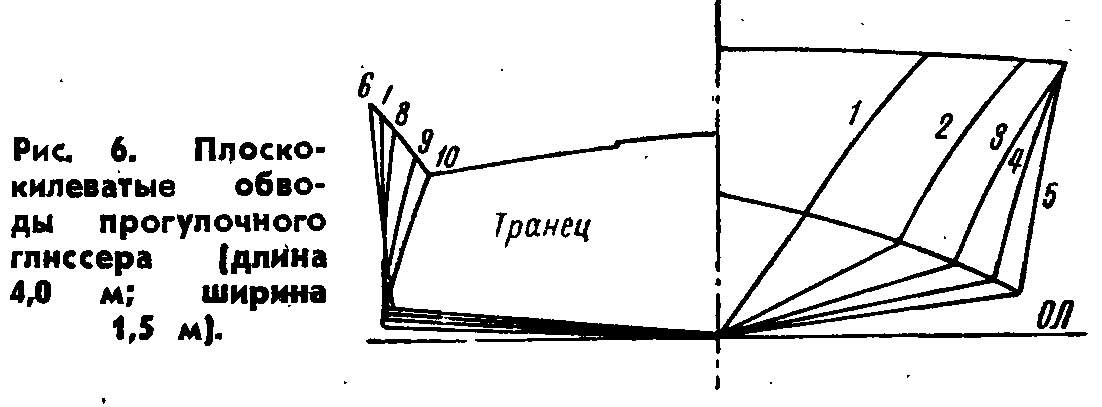
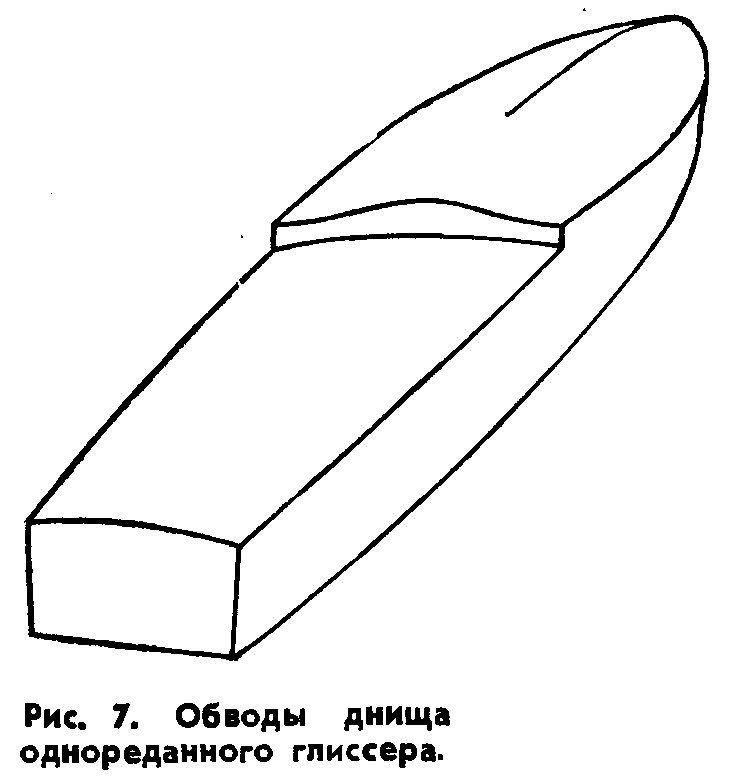
Обводы глиссирующих судов делают плоско-или изогнуто-килеватыми с углом килеватости, уменьшающимся от носа к корме до нуля и, в среднем, меньшим, чем для судов переходного режима; скулы — всегда острые по всей своей длине, корма — транцевая (рис. 6). Иногда на наиболее быстроходных глиссирующих судах, не предназначенных для хода по волнению, около середины длины поперек днища делают один или несколько уступов, называемых реданами (рис. 7).
Обводы глиссирующих судов рассчитаны на то, что судно на ходу поддерживается почти исключительно гидродинамической подъемной силой и лишь в очень малой степени архимедовой силой.