
«Андромеда» имеет размерения катамарана класса В: длину 5,5 м; ширину общую 2,6 м; ширину корпуса 0,58 м; площадь парусности 21 м2. Вес судна без крыльев — 160 кг. Яхтсмены-гонщики считают такой вес очень большим, однако, несмотря на это, «Андромеда» уже при ветре 2 балла выходит на крылья, а при ветре 3 балла в галфвинд развивает скорость до 45 км/час, обгоняя многие катера.
Конструкторы применили очень простую и легкую систему подводных крыльев, которая может быть быстро установлена или снята с судна. В носовой части на каждом корпусе закреплено по два коротких крыла, установленных одно над другим с разными углами атаки. В корме установлено одно крыло между корпусами, но в дальнейшем намечено и его разрезать на две небольшие «этажерки», закрепленные под каждым корпусом.
Конструкторы считают, что достигнутый ими успех — только начало большой и кропотливой работы. Им предстоит еще заставить ходить на крыльях свою «Андромеду» в бейдевинд и на большой волне.
Этим же озабочен и молодой судостроитель из Ленинграда Михаил Тюфтин. Для своих экспериментов с подводными крыльями он избрал старый корпус «Летучего Голландца». Надо сказать, что при этом он встретился еще с одной проблемой — остойчивостью яхты в крыльевом режиме. Ведь крылья на «Голландце» не разнесешь так широко, как на катамаране.
Михаил Тюфтин разработал оригинальную схему крыльев на модели яхты в ⅕ натуральной величины, а в навигацию 1967 г. собирается испытать и натурное судно.
Итак, крылатые яхты становятся реальностью! В публикуемой ниже статье рассказывается о попытках создать яхту на подводных крыльях за рубежом и о проблемах, с которыми пришлось при этом столкнуться. В следующих выпусках сборника конструкторы отечественных яхт на крыльях расскажут и о своих конструкциях.
Как быстро может идти парусная яхта? На этот вопрос все еще нельзя дать определенного ответа, несмотря на более чем двухсотлетний опыт проектирования яхт. Конструкторы установили, что скорость обычных парусных судов ограничивается величиной υ = 2,5√L (здесь υ — в узлах, L — длина по ватерлинии в метрах). Легкие яхты со специальными обводами при благоприятных условиях начинают глиссировать, благодаря чему их скорость значительно выше. Например, швертбот «Летучий Голландец» развивает скорость до 12—15 узлов (υ = 6√L), что вдвое больше скорости (5— 6 узлов), которую показывают швертботы водоизмещающие. Еще быстрее ходят современные гоночные катамараны, которые развивают скорость хода 20 узлов и более.
Имеются ли теоретические предпосылки и практически осуществимые пути для дальнейшего увеличения скорости хода парусных яхт?
Предельно возможными для парусного судна ходовыми качествами обладает некоторое воображаемое (идеальное) парусное судно, устойчиво движущееся без крена и дифферента и имеющее ничтожно малое лобовое сопротивление при бесконечно большом боковом [1, 2]. В реальных условиях это примерно соответствует гоночному буеру, идущему по хорошей ледовой дороге.
Громадная предельная скорость движения, превышающая 100 км/час (около 55 узлов!), высокие лавировочные качества и остойчивость современного гоночного буера позволяют рассматривать его как эталон-прототип для создания сверхскоростной парусной яхты.
Задача по созданию такой яхты будет успешно решена, если удастся получить «корпус» судна, обладающий всеми характеристиками коньков буера, идущего по чистому льду. С этой точки зрения конструкция многокорпусного судна — лишь промежуточная стадия решения проблемы «коньков» парусной яхты. Следующим шагом в этом направлении являются подводные крылья.
Первой успешной попыткой использовать подводные крылья на парусном судне, по-видимому, можно признать экспериментальную яхту «Монитор» американского конструктора Г. Бейкера (рис. 1), построенную в 1955 г. В крыльевом режиме «Монитор» развивает скорость 30 узл. На сегодня такая скорость является рекордом для небольших парусных судов (длина «Монитора» — 7,9 м; следовательно, υ = 10,6√L).
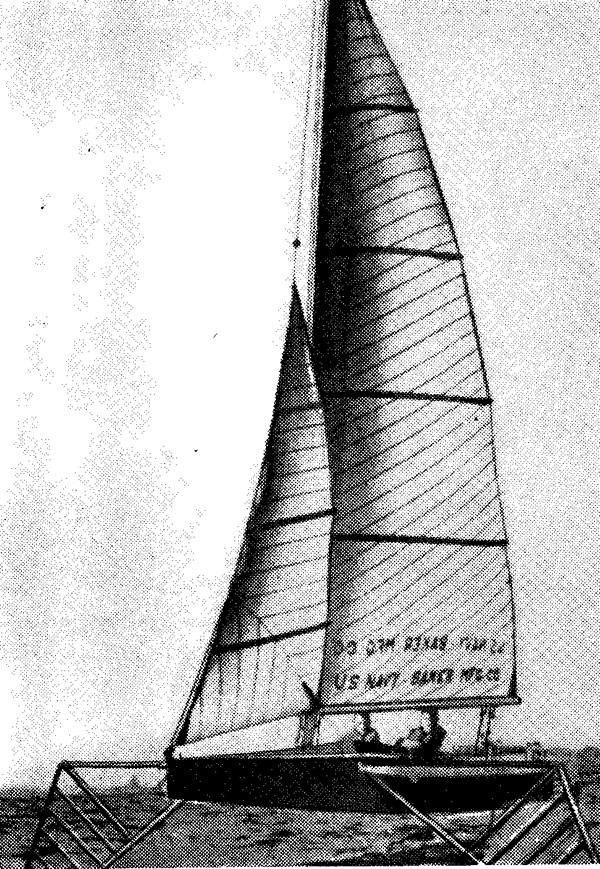
Можно заметить общее сходство компоновки «Монитора» и буера обычной конструкции с задним рулевым коньком. Буерные коньки на «Мониторе» имитируются системой трех этажерочных подводных крыльев, выполненных из нержавеющей стали. Крылья сильно разнесены по бортам и закреплены на поперечном брусе, благодаря чему обеспечивается остойчивость яхты до полного отрыва корпуса от воды. Поперечная остойчивость и движение без крена на крыльевом режиме обеспечиваются восстанавливающим гидродинамическим моментом сил, Действующих на погруженные в воду части несущих плоскостей бортовых крыльев. Продольная остойчивость автоматически регулируется кормовым крылом, угол атаки которого изменяется с помощью механической связи в зависимости от усилий, возникающих на мачте под действием парусов.
Несущие плоскости расположены под углом 45° к ДП для того, чтобы площадь крыльев и, соответственно, подъемная сила плавно изменялись в начальный период движения и в случае погружений крыльев на ходу. Вместе с вертикальными стойками они создают силу, препятствующую дрейфу. Функции руля выполняет кормовое крыло.
Наиболее благоприятные условия Для эксплуатации «Монитора» в крыльевом режиме создаются при скорости ветра 13—18 узл. (6,7—9,3 м/сек). Выход яхты на крылья возможен телько на курсе бакштаг при скорости ветра не менее 13 узл. (6,7 м/сек) [3, 4]; скорость судна в этот момент равна 12 узл. Высота подъема корпуса над водой составляет около 0,9 м. Скорость движения «Монитора» в крыльевом режиме в два раза превышает скорость ветра.
На примере «Монитора» была убедительно показана принципиальная возможность успешного использования подводных крыльев на парусных яхтах и достижения скорости до 30 узл.
Однако, как и любое первое начинание, «Монитор» не лишен ряда существенных конструктивных недостатков. При слабом ветре, когда яхта идет в водоизмещающем режиме, подводные крылья создают большое сопротивление движению. В этих условиях обычные швертботы имеют перед «Монитором» несомненное преимущество. Неполноценность ходовых качеств «Монитора» проявляется также и на лави-ровке. На курсах круче галфвинда яхта не может идти в крыльевом режиме, по-видимому, из-за недостатка поперечной остойчивости и сильного дрейфа. Неспособность судна лавировать в крыльевом режиме, т. е. на повышенных скоростях, сводит на нет выигрыш в скорости на полных курсах.
При скорости ветра около 10—13 узл. крылья не могут полностью оторвать корпус от воды, и судно движется в крайне невыгодном режиме затянутого выхода на крылья. Недостаток поперечной остойчивости экипажу приходится компенсировать открениванием.
Большие габаритная ширина и осадка на плаву, повышенная уязвимость крыльев, необходимость в устройствах Для подъема яхты на берег после каждого выхода также являются существенными недостатками «Монитора».
Характерной особенностью работы паруса как движителя является рост силы тяги по мере роста скорости судна, но при этом значительно быстрее, чем сила тяги, увеличиваются сила дрейфа и соответственно кренящий момент. К сожалению, на предельно возможной скорости хода сила дрейфа и кренящий момент становятся настолько значительными, что после выхода судна на крылья приходится не полностью добирать шкоты. Даже с частично обезветренными парусами требуются значительные усилия при работе на шкотах. По этим причинам крайне желателен жесткий парус.
Недостатком любого судна с системой неподвижных крыльев является неустойчивость движения в крыльевом режиме на волнении, которая вызывает потерю скорости и опасные удары корпуса о воду. Этажерочные крылья обеспечивают постоянство подъемной силы за счет изменения своей эффективной погруженной поверхности. Периодическое колебание уровня погружения крыла на волнении, не связанное с изменением высоты подъема судна над спокойной поверхностью воды, вызывает крайне нежелательные вертикальные колебания судна с относительно малой амплитудой и большими ускорениями.
Действующие перегрузки ухудшают условия обитаемости и вызывают дополнительные опасения за прочность и без того сильно нагруженных узлов конструкции яхты. Поэтому обеспечение устойчивого движения яхт на крыльях в условиях морского волнения является первостепенной задачей. Другая не менее важная задача заключается в уменьшении габаритов крыльевой системы, разработке складывающихся или убирающихся крыльев.
Наиболее успешно эти задачи решены английским конструктором X. Гуком [5, 6]. Он разработал (для катеров) оригинальную систему глубокопогруженных автоматически управляемых подводных крыльев, известную под названием «Хайдрофин». Выход судна на крылья и дальнейшее движение осуществляются путем регулирования углов атаки двух бортовых крыльев, действующих независимо друг от друга. Это достигается дополнительным включением в крыльевую систему двух вспомогательных следящих носовых крыльев и механизма ручного управления.
Третье неуправляемое несущее крыло устанавливается в кормовой части судна и одновременно выполняет функции руля. Бортовые крылья несут 84% нагрузки; 15% приходится на кормовое крыло и 1%—на два следящих носовых крыла.
На рис. 2 показана кинематическая схема механизма управления одним из бортовых крыльев (механизм ручного управления не показан). С помощью длинного кронштейна 1 перед носовой частью корпуса судна выносится жестко закрепленное следящее крыло 2. Кронштейн 1 поддерживается амортизатором 3 относительно неподвижной стойки 6 в таком положении, что вспомогательное крыло 2 движется над спокойной поверхностью воды на высоте Н1. Крыло 2 имеет шарнирно закрепленный подкрылок 4, связанный с кронштейном 1 посредством пружины 5, жесткость которой очень мала по сравнению с жесткостью амортизатора 3. Контакт кронштейна 1 с поверхностью воды в пределах высоты волны, равной Н1, осуществляется с помощью подкрылка 4.
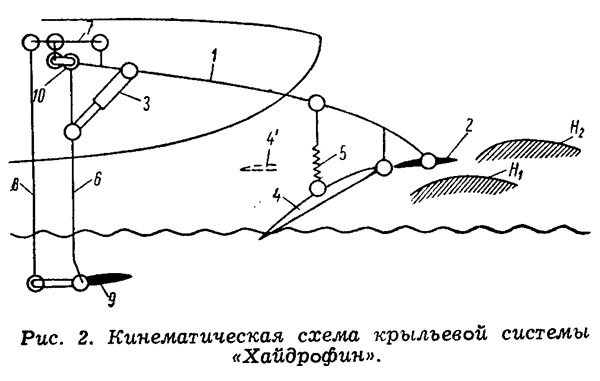
Волна, имеющая высоту не более Н1, свободно проходит под крылом 2 и воздействует только на подкрылок 4, отклоняя его максимально до крайнего положения 4'. Усилие действия сжатой пружины 5 на кронштейн 1 при этом слишком мало, чтобы растянуть амортизатор 3. Поэтому система управления углом атаки не срабатывает, и судно совершает полет на волнении без вертикальных колебаний. Для обеспечения такого благоприятного режима движения высота волны H1 должна быть равна примерно 15% длины судна.
Если крыло 2 встречает волну Н2, то на нем возникает подъемная сила, момент которой относительно оси качания 10 кронштейна 1 способен растянуть амортизатор 3 и через систему рычагов 7 и 8 увеличить угол атаки крыла 9 пропорционально высоте волны H2. Рост подъемной силы на крыле 9 вызывает подъем корпуса и исключает его соприкосновение с водой.
Срыв крыльевого режима предотвращается также и за счет дифферентующего момента от непосредственного действия подъемной силы на крыле 2. Прочность кронштейна 1 должна быть достаточной для поддержания носовой части судна без учета действия бортового крыла.
После прохода одиночной волны H2 подкрылок 4, имея небольшую инерцию, отклоняется в исходное нижнее положение и снова восстанавливает контакт кронштейна 1 с поверхностью воды. Свободное сжатие амортизатора 3 обеспечивает уменьшение угла атаки крыла 9 и возвращение кронштейна 1 в исходное положение.
Серия крутых коротких волн H2 заставляет крыло 2 двигаться на гребнях по инерции, в то время как подкрылок 4 будет отклоняться вниз для поддержания контакта с подошвами волн. Кронштейн 1 теперь будет занимать более высокое положение по отношению к корпусу, что должно быть компенсировано уменьшением угла атаки крыла 9 с помощью механизма ручного управления.
Система с раздельным управлением бортовыми крыльями обеспечивает также и достаточно высокую поперечную остойчивость.
Рассмотрим случай крена на правый борт, при котором кронштейн правого борта получает движение Р, а кронштейн левого борта, соответственно, Движение Q (рис. 3).
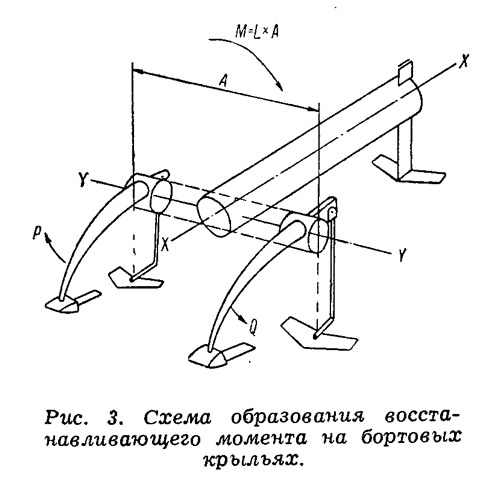
Вследствие перемещения кронштейнов возникает подъемная сила L на правом борту и отрицательная подъемная сила — L на левом борту, что и создает восстанавливающий момент M = LA пары этих сил относительно продольной оси судна X—X с плечом, равным разносу А бортовых крыльев.
Вывод судна на крылья и компенсация постоянного крена (например, на циркуляции) производится с помощью механизма ручного управления. Складывание крыльев возможно в режиме плавания путем поворота стоек 6 вокруг оси 10 вдоль бортов. Конструктивно ось вращения 10 выполняется в виде трубы, являющейся основной опорой, несущей вес судна при ходе на крыльях.
Крепление крыльев возможно также и на пантографах, управляемых с помощью небольших лебедок, что обеспечивает плавание судна на малых скоростях с использованием поднятых крыльев в качестве стабилизаторов качки.
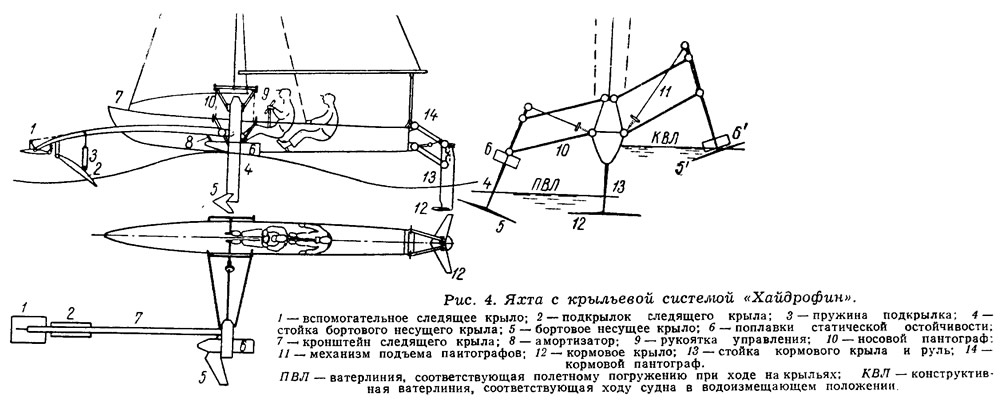
Система «Хайдрофин» хорошо себя зарекомендовала в условиях морского волнения на ряде построенных катеров благодаря относительной простоте и надежности конструкции. Принцип ее работы может быть также успешно использован и на парусных яхтах. На рис. 4 представлена условная схема яхты на подводных крыльях системы «Хайдрофин», разработанная X. Гуком в сотрудничестве с английским конструктором X. Баркла.
В этой конструкции яхты в значительной степени устранены недостатки, свойственные «Монитору».
Система «Хайдрофин» использует значительно меньшие смоченные поверхности при выходе на крылья, благодаря чему отрыв корпуса от воды возможен уже при скорости ветра 9—10 узл.
Существенным достоинством этой системы применительно к парусной яхте является то, что судно может выходить на крылья независимо от курса относительно направ ления бега волн. В то же время судно с неподвижными крыльями испытывает затруднения при старте с попутным волнением. Возможность складывания крыльев в водоизме-щающем режиме обеспечивает яхте приемлемый ход на слабых ветрах. Недостаток поперечной остойчивости возмещается использованием поплавков статической остойчивости, которые при ходе в крыльевом режиме поднимаются вверх по стойкам крыльев. Некоторый наклон стоек бортовых крыльев в поперечном направлении вызван необходимостью использовать часть подъемной силы несущих плоскостей для противодействия дрейфу.
По-видимому, значительная сила дрейфа, характерная для парусного вооружения типа шлюп, так же как и на «Мониторе», будет все же сильно ограничивать лавировочные качества яхты «Хайдрофин» в крыльевом режиме, несмотря на высокую динамическую устойчивость крыльевой системы.
В 1963 г. в США опубликована интересная работа Б. Смита [3], посвященная поискам рациональной конструкции парусного судна на подводных крыльях. Первые самоходные модели Б. Смита копировали буера с передним рулевым коньком и мягким парусом. Они плохо ходили крутыми курсами, но развивали необычно высокую скорость на курсе бакштаг. Роль коньков буера выполняли подводные крылья с небольшим удлинением. Крылья имели Достаточный объем для поддержания модели на плаву в состоянии покоя.
Дальнейшие поиски привели к созданию гидроаэродинамической системы «гидроаэрокрыл», модель которой показана на рис. 5. Основным конструктивным узлом модели является фюзеляж, к которому жестко крепятся носовые и кормовое подводные крылья-поплавки. Воздушный руль-стабилизатор устанавливается в кормовой оконечности фюзеляжа и обеспечивает устойчивость движения модели на курсе. К фюзеляжу жестко крепится наклонное крыло-парус, к которому, в свою очередь, жестко крепится аутригер с подводным крылом-поплавком. Вертикальная часть крыла аутригера одновременно выполняет роль шверта. Модель решает задачу отработки движения на одном правом галсе.
Самоходные испытания гидроазрокрыла «Маленький Мерримак» в 1962 г. показали, что при скорости ветра 10 узл. модель способна двигаться на крутом курсе со скоростью, не меньшей скорости ветра.
Успешные результаты испытания модели «Маленький Мерримак» и опыт постройки первого натурного образца позволили Б. Смиту разработать новый проект гидроаэрокрыла, схема которого приведена на рис. 6. В верхней части рисунка судно, показанное в плане, движется в бейдевинд левого галса относительно вымпельного ветра Wr в направлении Vb.
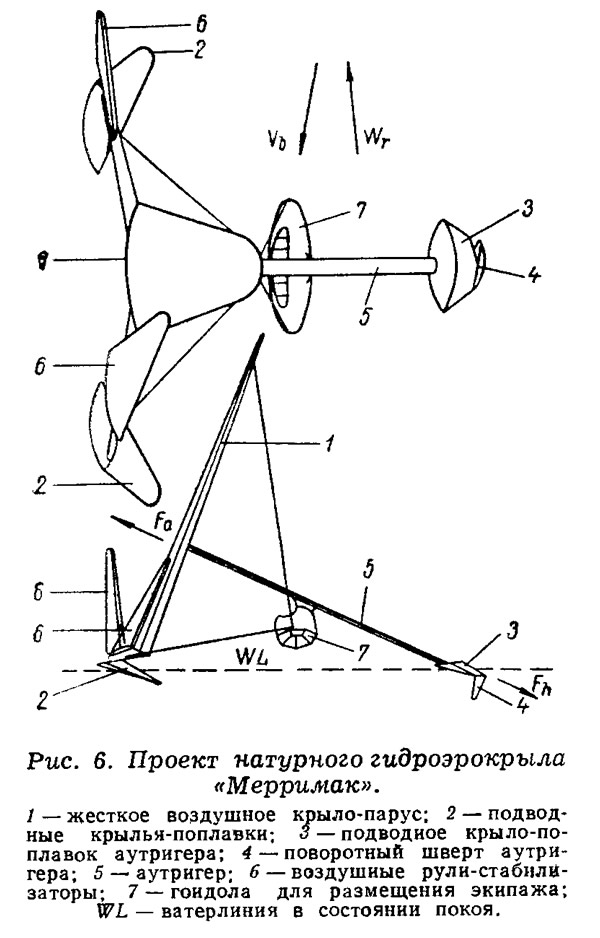
Направление движения Vb определяется положением хорды поворотного шверта 4 аутригера, а также флюгерным положением «кормового» воздушного руля-стабилизатора 6.
«Носовой» воздушный руль 6 играет роль стакселя. Подводные крылья-поплавки 2 и воздушное крыло-парус 1 жестко присоединены к фюзеляжу судна так, что хорды их профилей строго параллельны.
Управление воздушными рулями 6 и швертом 4 производится из гондолы 7 с помощью тросовой проводки. Этим осуществляется изменение направления движения в пределах одного галса, а также выполнение поворота. Например, для того чтобы лечь на правый галс, необходимо переложить воздушные рули 6 и шверт 4 в крайнее левое положение. Этим обеспечиваются торможение, остановка, пересечение направления действия истинного ветра в процессе поворота судна вокруг шверта 4 и начало движения на правом галсе «кормой» вперед. Воздушные рули при этом меняются ролями. Таким образом, выполнение поворота производится так же, как и на полинезийских прао, оборудованных аутригером. Все крылья — воздушное (парус) и подводные — имеют выпукло-вогнутый профиль, симметричный относительно своей поперечной оси. Это обеспечивает одинаковые и вполне приемлемые динамические характеристики при набегании потока со стороны любой кромки крыла. Поперечная остойчивость судна обеспечивается (кроме действия подводных крыльев) наклоном крыла-паруса 1.
При движении гидроаэрокрыла на крыле-парусе 1 возникает сила Fa, а на шверте 4 противоположно ей направленная сила Fh,. Когда эти силы равны и действуют по одной прямой, кренящий момент не образуется. Проект предусматривает обеспечение поперечной остойчивости также и за счет непосредственного действия аутригера 5.
Аутригер крепится к крылу-парусу шарнирно. Путем изменения угла наклона крыла-паруса с помощью показанных на рис. 6 тросов достигается регулирование скорости хода и «взятие рифов» за счет изменения эффективной площади парусности.
Автор проекта считает, что судно будет развивать максимальную скорость хода более 40 узл. при ветре в 15 узл.
На курсе галфвинд гидроаэрокрыл сможет двигаться со скоростью, в два раза превышающей скорость ветра, а на курсах бейдевинд и фордевинд со скоростью, близкой к скорости ветра.
Сейчас еще трудно оценить полностью столь смелое решение проблемы парусного судна на подводных крыльях. Некоторые теоретические предпосылки и практические выводы автора проекта требуют более внимательного изучения. Например, возможность получить скорость 40 узл, с помощью подводных крыльев предлагаемой конструкции представляется несколько сомнительной, если учитывать влияние развитого волнения. Наиболее ценным в проекте является конструкция паруса, которая позволяет существенно уменьшить кренящий момент. Это должно обеспечить судну хорошие лавировочные качества в крыльевом режиме.
На рис. 7 показана модель «Мерримака-И» во время испытаний. Натурный образец гидроаэрокрыла длиной 9 м находится в постройке [7].
В заключение хочется добавить, что возможны и другие схемы использования подводных крыльев на парусных судах, в частности на катамаранах [8].
Однако ни одна техническая проблема не может быть решена только на чертежном столе. Опыт использования подводных крыльев на яхтах еще очень мал. Поэтому любые практические результаты, полученные на воде, могут приблизить успешное решение этой интересной инженерной задачи.
Использованная литература
- 1. Крючков Ю. С., Может ли парусное судно идти быстрее ветра? «Судостроение», № 6, 1961.
- 2. Крючков Ю. С., Лапин В. И., Парусные катамараны, «Судпромгиз», 1963.
- 3. Smith Bernard, The 40-knot Sailboat, New York, 1963.
- 4. Hydrofoil Sailboat. «Hovering Craft and Hydrofoil», October, 1961.
- 5. J. Vintenоn, Hydrofins and Hydrofoils, «Hovering Craft and Hydrofoil», June/July, 1963.
- 6. J. Vintenоn, Les «Hydrofins» de Mr Hook, «La Revue Nautique», N 212, 213, 1959.
- 7. В onnie P. Winawcr, The 40-knot Sailboat, «Motor Boating», September, 1963
- 8. Cornwell C. E.. A discussion of hydrofoils for sailing era It, «Motor Boating», September, 1962.
- 9. Mуpугов В. С., Яременко О. В., Морские суда на подводных крыльях, «Морской транспорт», 1962.