
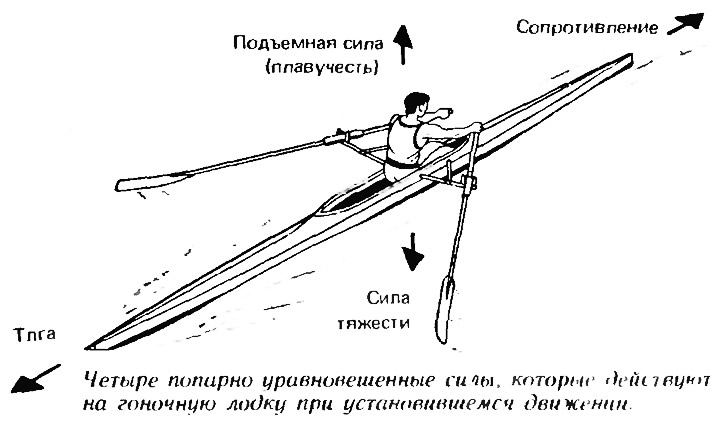
На любое движущееся плавсредство, будь то плот, толкаемый шестом, или академическая восьмерка на дистанции регаты, действуют четыре основные силы: сила тяжести, подъемная сила, тяга и сопротивление движению.
Если лодка не испытывает вертикальных ускорений, подъемная сила, естественно, направленная вверх, и сила тяжести, направленная вниз, равны и уравновешивают одна другую. У обычных водоизмещающих судов и лодок подъемная сила обусловлена плавучестью, т. е. создается действием сил поддержания воды при вытеснении ее корпусом лодки; она равна весу вытесненной воды — водоизмещению которое равно массе — весу лодки. Тяга — это сила, которая заставляет лодку двигаться вперед. Наконец, сила сопротивления воды движению лодки направлена в противоположном направлении. Если лодка движется с постоянной скоростью, сила тяги равна силе сопротивления.
Чтобы наиболее эффективно превратить вырабатываемую человеком (в довольно ограниченном количестве) энергию в энергию движения лодки, необходимо, прежде всего, уменьшить сопротивление. Самый очевидный путь — снизить вес лодки, а следовательно и объем погруженной части корпуса и связанную с ним силу сопротивления.
Усилия конструкторов в этом направлении привели к созданию гоночных лодок, вес которых составляет лишь малую долю от веса гребца (заметим — такое же соотношение характерно для весов велосипеда и велосипедиста). В прошлом гоночные лодки делались преимущественно из кедра, ели и красного дерева, снижение веса корпуса достигалось только за счет уменьшения толщины обшивки. В 50-х годах появились экспериментальные лодки из пластика, армированного стекловолокном. А к концу 60-х — главенствующую роль на дистанциях спортивных состязаний заняли серийно выпускаемые лодки из высокопрочных композиционных материалов типа смол, армированных полимерными или углеродными волокнами. Это позволило снизить вес лодки-одиночки до 10 кг.
При очень малых скоростях любые водоизмещающие суда имеют исключительно низкое сопротивление, однако спортивные лодки никогда не рассчитываются на низкие скорости. По мере же возрастания скоростей существенно возрастает и сопротивление воды. В судостроении принято рассматривать его в виде суммы двух слагаемых.
Первое из них — волновое сопротивление, характеризующее затраты мощности на образование волновых систем у носа и кормы. Волновое сопротивление растет с увеличением скорости лодки не равномерно, поскольку носовые волны начинают взаимодействовать с кормовыми. Если эти системы волн встречаются в фазе, т. е. вершины волн носовых накладываются на вершины волн кормовых, то и величина волн, и бесполезные затраты мощности на их образование резко возрастают.
При так называемой «корпусной скорости» |у нас этот термин не принят — Ред.) нос движущейся лодки находится на гребне, а корма — в ближайшей впадине, т. е. на подошве той же волны. Лодка при этом вынуждена буквальным образом толкать перед собой водяной холм. В таких условиях для дальнейшего повышения скорости потребуется дополнительно затратить очень большую энергию. Энергии, вырабатываемой человеком, для этой цели обычно недостаточно, поэтому корпусная скорость является принципиальным пределом скорости для гоночных лодок с водоизмещающим корпусом.
Корпусная скорость пропорциональна корню квадратному из длины лодки по ватерлинии, поэтому при равном водоизмещении лодки с длинными (и узкими) корпусами всегда испытывают меньшее волновое сопротивление, чем короткие (и широкие). Однако длинные и узкие корпуса имеют большую смачиваемую поверхность, чем короткие и широкие, а увеличение смоченной поверхности всегда вызывает повышение второго слагаемого силы сопротивления — так называемого сопротивления трения, обусловленного трением о воду. Итак, чем больше вытянута — относительно длиннее лодка, тем меньше доля волнового сопротивления, но тем больше сопротивление трения.
Корпус гоночной лодки должен иметь такую форму, чтобы на расчетной скорости сумма волнового сопротивления и сопротивления трения была наименьшей. Обычно такие лодки предназначаются для состязаний продолжительностью 6—7 мин при затратах мощности 0,5 л. с. на одного гребца. Для таких условий оптимальное отношение длины к ширине должно быть не менее 30. Так, академическая одиночка имеет длину 8—9 м и ширину не более 0,30 м. У такой лодки оптимальной формы составляющие силы сопротивления далеко не равны: 80% сопротивления, действующего на лодку, обусловлено трением, а остальные 20% — образованием волн.
Сопротивление трения связано с вязкостью воды в том тонком слое, называемом пограничным, который обтекает корпус лодки, касаясь ее обшивки. Существуют два типа движения жидкости: ламинарное — равномерное, и турбулентное, при котором лоток имеет вихревой, хаотический характер. При ламинарном обтекании сопротивление трения намного меньше, чем при турбулентном. У гоночной лодки режим течения в пограничном слое имеет ламинарный характер в носовой оконечности корпуса, но становится турбулентным уже на небольшом расстоянии от форштевня по направлению к корме.
Сопротивление трения значительно уменьшается, если переход от ламинарного обтекания к турбулентному задерживается, и площадь обшивки корпуса, на которой пограничный слой носит ламинарный характер, становится больше.
Один из способов снижения сопротивления трения за счет ламинаризации обтекания состоит в том, чтобы выпускать в пограничный слой вблизи носовой части судна высокомолекулярные полимеры. Устроители соревнований не разрешают использование этого метода хотя бы потому, что при этом происходит загрязнение воды. Вероятно, можно было бы использовать другой подход: создание на поверхности корпуса слоя скользких водорослей или иных безвредных микроорганизмов.
Другим способом ламинаризации пограничного слоя является непрерывное всасывание жидкости из него внутрь корпуса через поры или маленькие отверстия в наружной обшивке. Для удаления воды из лодки можно было бы по мере необходимости использовать небольшой насос.
Снизить сопротивление трения можно и выбором структуры смачиваемой поверхности корпуса. Эксперименты, проведенные при содействии Национального управления по аэронавтике и исследованию космического пространства, показали, что гладкая полированная поверхность далеко не всегда обладает наименьшим трением. Оказалось, что у поверхности с очень тонкими канавками, вытянутыми точно по направлению обтекающего потока, сопротивление трения на 6% меньше, чем у гладкой поверхности.
Влияние таких канавок изучалось на корпусе лодки-одиночки с пластиковым покрытием. Расстояние между канавками составляло около 80 мкм, т. е. было даже меньше, чем расстояние между звуковыми дорожками на грампластинке. В результате нанесения канавок максимальная скорость лодки увеличилась на 2%. Эта величина может показаться незначительной, однако на стандартной дистанции 2000 м она обеспечивает опережение на четверть корпуса...
Ободренные этими результатами исследователи использовали экспериментальное покрытие для олимпийской сборной США, выступающей на четверках с рулевым. Команда показала блестящие результаты и завоевала на летних Олимпийских играх 1984 г. серебряную медаль.
Теперь отметим важность всемерного повышения эффективности движителя. Иначе говоря, в полезную тягу должна превращаться как можно большая доля энергии, вырабатываемой человеком.
В истории гребного спорта можно указать два основных этапных достижения, повысивших КПД гребли. Одно из них — изобретение в 1843 г. выносных уключин, которые крепятся к бортам лодки на кронштейнах и находятся за пределами ширины корпуса. Это сразу же дало возможность делать сам корпус уже. что приводит к уменьшению волнового сопротивления, а весла — длиннее, что позволяет гребцам делать более длинные и эффективные гребни.
Второе изобретение — подвижное сиденье — относится к 1856 г. До этого при гребле работали только мускулы рук, плеч и спины а большие мускулы ног лишь поддерживали тело гребца. Подвижное сиденье позволяет использовать и работу, производимую мышцами ног: когда сиденье движется вперед и назад, ноги сгибаются и разгибаются. Первое подвижное сиденье было довольно примитивным и представляло собой подушку из овечьей шкуры, скользящую по смазанной жиром панели. Слайд — скользящее по рельсам сиденье на подшипниках, широко используемое сегодня, было изобретено в США в 1857 г.
В 1981 г. П. Кольб выиграл мировой чемпионат в Мюнхене на лодке совершенно новой конструкции. На ней наоборот — сиденье было сделано неподвижным, а рама, на которой укреплены и выносные уключины, и упоры для ног, — скользящей. Что это дало! Движения гребца при работе веслами остались такими же, как и на «обычной» лодке со слайдом, но основная масса тела гребца стала неподвижной, сосредоточенной на сиденье, благодаря чему колебания положения центра тяжести всей системы лодка — гребец (на легкой лодке он располагается вблизи центра тяжести гребца) значительно уменьшаются. Это приводит к уменьшению продольного раскачивания лодки (при котором вовлекаются в колебательные движения большие массы воды| и, следовательно, затраты энергии на волнообразование снижаются, а скорость возрастает.
В финале мирового чемпионата 1982 г. пять лодок имели неподвижные сиденья и подвижные уключины. В 1983 г. все шесть финалистов использовали такие лодки. Однако сразу после этого было принято решение не допускать лодки с подвижными уключинами к соревнованиям, что и положило конец развитию интересной идеи.
Хотя такие сделанные свыше ста лет назад усовершенствования, как выносные уключины и подвижное сиденье, значительно повысили эффективность гребли, перспектив дальнейшего прогресса, похоже, нет. Сам процесс гребли имеет принципиальное ограничение. Весла создают тягу, отбрасывая воду назад. Однако весла частично проскальзывают в воде, что приводит к потерям мощности. Эти потери можно уменьшить, увеличивая размер лопасти, однако на этом пути существуют непреодолимые чисто практические ограничения. Весьма значительным может быть и аэродинамическое сопротивление лопастей, когда они совершают обратное рабочему движение (особенно заметен этот эффект при ветре|. Какие-то (и немалые) потери возникают при входе лопасти в воду — начале гребка — и выходе ее из воды. Движитель работает крайне неравномерно: неизбежны падения упора и скорости (и бесполезные затраты энергии| во время нерабочего хода, т. е. при заносе весла...
Весло известно человеку многие тысячи лет. Однако детали физических процессов, происходящих при гребле, поняты еще недостаточно. Неоспоримо только то, что, по результатам многочисленных исследований, КПД гребли лежит между 65 и 75%. Следовательно, только около 2/3 вырабатываемой гребцом энергии передается лодке и превращается в полезную работу — тягу, остальная же энергия затрачивается на создание возмущений в воде и воздухе. Совершенно закономерным, если не говорить о чисто спортивной стороне вопроса, было обращение, уже в наши дни, к гораздо более совершенному и широко распространенному на водном транспорте движителю — гребному винту.
Малоизвестен тот факт, что уже в начале нашего века, до распространения подвесных моторов, применялись лодки с гребными винтами, приводимыми в движение человеком. Такие лодки с ручным или педальным приводом иногда оказывались и более быстроходными, и менее «энергоемкими», чем каноэ и обычные весельные лодки. Известно, например, что в 1890-х годах на 163-километровом маршруте по Темзе трехместный катамаран, снабженный гребным винтом, развил скорость на 13% большую, чем трехместная весельная лодка.
И тем не менее на обычных водоизмещающих лодках гребной винт так и не привился, снова был повсеместно вытеснен несоизмеримо более простым и доступным веслом. Конструкторы убедились, что добиться высокого КПД установки с механической передачей на винт не так-то просто. Устройство получается громоздким и сложным как при постройке лодки, так и в эксплуатации. Гребной винт имеет недостатки и сам по себе: запутывается в водорослях, на мелководье задевает дно, плохо работает на волнении, при изменении нагрузки лодки и ее скорости движения. Но если говорить не об обычных универсальных лодках, а о приводимых в движение человеком специально конструируемых легких скоростных аппаратах, то здесь «игра стоит свеч». У гребного винта нет свойственных веслу перерывов между рабочими ходами; упор, создаваемый при вращении его всегда погруженными в воду лопастями, постоянен. Здесь, поскольку развиваемая мощность и нагрузка на лопасть невелики, могут применяться наиболее высокоэффективные (имеющие КПД 90 % и выше!) винты с узкими лопастями. Незначительная концевая скорость попасти снимает проблему кавитации.
Гребной винт легко приводить в движение при помощи педалей и цепной передачи, похожих на велосипедные. Такая конструкция позволяет реализовать преимущество быстрого и сильного движения ног. Круговое движение при вращении педалей остается на практике наиболее эффективным методом непрерывной передачи энергии человека к машине. Не случайно же все воздушные и наземные аппараты, приводимые в движение человеком и развивающие наибольшие скорости, имеют приводные устройства, подобные велосипедному.
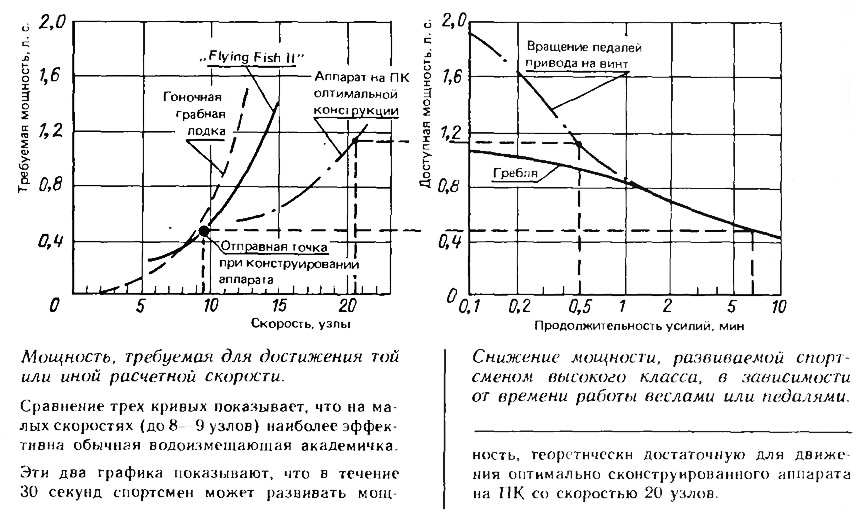
При обычной гребле, когда спортсмен сидит на неподвижном сиденье прямо и в работе принимают участие только мускулы спины, плеч и рук, вырабатываемая мощность значительно меньше, чем при вращении педалей ногами. Правда, установка подвижного сиденья позволяет повысить вырабатываемую мощность до уровня, достигаемого на аппаратах с педальным приводом, по крайней мере — на отрезках времени более нескольких минут. Дело в том, что при продолжительности работы свыше 1 мин преимущества педального привода теряются из-за ограничений, накладываемых возможностями кровеносной и дыхательной систем человека.
Велосипедист мирового класса может в течение нескольких секунд развивать мощность около 2 л. с. В течение более продолжительного времени, скажем 6 мин, он, вообще говоря, может развивать лишь гораздо меньшую мощность — не более 0,5 л. с. На величину вырабатываемой мощности влияют многие факторы, в том числе скорость вращения педалей, высота сиденья, длина шатунов, а также физическое состояние велосипедиста и его психологический настрой.
Итак, принципиальное преимущество педально-винтовых лодок перед весельными заключается главным образом в том, что используется более эффективный механизм превращения мускульной энергии человека в энергию движения лодки и устраняется неравномерность движения весельной лодки, являющаяся причиной дополнительного сопротивления.
Однако существенного прироста скорости это само по себе не обеспечивало. Конструкторы рекордных аппаратов, использующих энергию человека, были вынуждены обратиться к опыту «большого судостроения», которое решает аналогичные задачи, добиваясь резкого снижения сопротивления воды движению судна.
В принципе «избавиться» от волнового сопротивления можно, если судно, обычно находящееся на границе двух сред — воды и воздуха, решительно переместить в одну из них: или погрузить полностью под поверхность, или поднять из воды в воздух, «поставив» на подводные крылья (либо воздушную подушку). Ясно, что при движении на крыльях мы одновременно почти устраняем и сопротивление трения, составляющее основную часть сопротивления на малых скоростях.
Рассмотрим первый из этих двух путей. Придающий плавучесть корпус идет под водой, гонщик находится над поверхностью воды, причем его сиденье и узел передачи поддерживаются узкими пересекающими поверхность стойками. Корпус, обладающий наименьшим сопротивлением, должен иметь форму капли с длиной, в 3—4 раза превышающей наибольший диаметр. Такой аппарат напоминал бы одноколесный велосипед — удерживать на нем равновесие было бы столь же трудным делом! Одно из решений этой проблемы предложено Т. Шмидтом. Для обеспечения остойчивости он прикрепил к подводному корпусу собственной конструкции легкую прямоугольную раму с четырьмя подводными крыльями по углам.
Устройство, напоминающее трехколесный велосипед и состоящее из трех подводных плавучих корпусов меньшего размера, было бы, естественно, остойчивым, но менее быстроходным. Поскольку один большой корпус имеет меньшую площадь поверхности, чем три меньших корпуса с той же суммарной плавучестью, трехкорпусный вариант будет неизбежно иметь и больший вес, и увеличенное сопротивление трения.
Проблема остойчивости одиночного подводного корпуса может быть решена, если поместить человека внутрь него, т. е. фактически превратить аппарат в подводную лодку. Однако обтекаемый корпус такой величины, чтобы вместить человека, получится гораздо больше и тяжелее, чем необходимый лишь для поддержания человека над водой. Попутно заметим, что хотя для перемещения вблизи поверхности воды подводная лодка, приводимая в движение мускульной силой, не может считаться конструкцией оптимальной, она имеет определенные преимущества перед ныряльщиком с ластами. В начале 50-х годов сконструированная К. Гонгверсом серийная двухместная подводная лодка «Минисаб», снабженная двумя винтами противоположного вращения (диаметром 760 мм) с педальным приводом, развивала скорость до 7 узлов, что в три раза превышает скорость, с которой может плыть под водой ныряльщик.
Практически наиболее перспективным путем представляется использование подводных крыльев, которые действуют точно так же, как крылья самолета. Однако опирающиеся на воду, в 800 раз более плотную, чем воздух, подводные крылья могут иметь, в отличие от самолетных, весьма небольшие размеры. Так, при скорости 9 узлов подводное крыло площадью 0,1 м создает подъемную силу, способную поддерживать над водой вес человека; при вдвое большей скорости крыло, создающее такую же подъемную силу, может иметь площадь, еще в 4 раза меньшую.
Благодаря небольшой площади подводное крыло обладает очень малым сопротивлением трения, но следует учитывать, что оно, как и крыло самолета, оставляет после себя вихревой след — создает так называемое индуктивное сопротивление. Дополнительное сопротивление трения и волновое сопротивление создают и стойки крыла. Однако в целом эти потери с лихвой перекрываются тем, что при движении на крыльях все остальные части аппарата вообще не испытывают сопротивления воды — движутся в воздухе.
Есть только одно «но». Любой аппарат на крыльях, прежде чем «взлететь», должен разбежаться — набрать какую-то относительно высокую скорость, достаточную, чтобы на крыльях образовалась подъемная сила необходимой величины. При низкой скорости на подводных крыльях практически нет подъемной силы, поэтому на время разбега необходим какой-то плавучий корпус-поплавок, удерживающий аппарат на поверхности.
Простейшие расчеты показывают, что крыло должно двигаться со скоростью свыше 10 узлов, чтобы создаваемая им подъемная сила стала достаточной для поддержания в воздухе аппарата со спортсменом. И сложность оказывается в том, что достичь такой скорости, пока корпус находится в воде и испытывает сопротивление движению, просто не удается!
Применение подводного крыла существенно большей площади помогло бы снизить «скорость отрыва», но, вероятнее всего, увеличение веса и рост смоченной поверхности разросшейся крыльевой системы так и не позволят аппарату двигаться достаточно быстро. То же соображение ограничивает использование такой системы, в которой крылья меньшего размера укрепляются под «стартовыми» крыльями большего размера, как это делается на некоторых пассажирских СПК. Благодаря увеличенной суммарной площади крыльев аппарат должен отрываться от воды при сравнительно низких скоростях, когда же и сами большие стартовые крылья выйдут из воды, сопротивление дополнительно уменьшится и для движения на расчетной скорости будет достаточно площади основных малых крыльев
На сегодня принципиальные трудности, стоящие на пути конструирования подводных крыльев, не позволяют снабженным ими водным аппаратам на мускульной силе развивать такие же скорости, каких достигают воздушные мускулолеты (свыше 25 узлов). Тем не менее есть и определенные успехи.
Двое из нас (Брукс и Абботт) в 1984 г. разработали и построили педальный аппарат «Flying Fish I» («Летучая рыба I») — первый аппарат на подводных крыльях2, который мог в течение сравнительно долгого времени двигаться только благодаря мускульным усилиям человека. Плавучего корпуса аппарат не имел. Скорость, необходимая для выхода на крылья, достигалась катапультированием аппарата с плавучей рамы. Используя подобный «летающий старт», известный спортсмен-велосипедист С. Хегг, обладатель золотой олимпийской медали, прошел на «Летучей рыбе I» дистанцию 2000 м за 6 мин 38 сек, т. е. на 11 сек превысил мировой рекорд для одиночек в академической гребле. (Это сравнение, разумеется, относительно, так как рекорд в гребле был установлен при старте с места).
Аппарат имел два подводных крыла на вертикальных стойках в ДП. Размах основного крыла, расположенного примерно под ЦТ аппарата и воспринимающего 90% его веса, увеличен до 1,8 м (для уменьшения индуктивного сопротивления). Внутри полой обтекаемой стойки этого крыла расположена гибкая передача на гребной вал, размещенный в сигарообразном корпусе в месте крепления стойки к кормовой кромке крыла.
Основная функция слабо нагруженного поворотного и снабженного закрылками-элеронами носового крыла — обеспечение устойчивости движения и управление поворотом. Дифферент аппарата, заглубление и угол атаки основного крыла регулируются при помощи специального устройства. Прикрепленная к стойке лопатка скользит по поверхности воды и любое изменение ее положения автоматически передается на закрылки, соответственно изменяющие характер движения аппарата в целом.
Стойка носового крыла служит также пером руля поворота; она соединена тягой с велосипедным рулем. «Ездить» на аппарате приходится так же, как на велосипеде. Часть конструкции, которая при движении находится над водой, по сути дела и представляет собой несколько видоизмененную велосипедную раму.
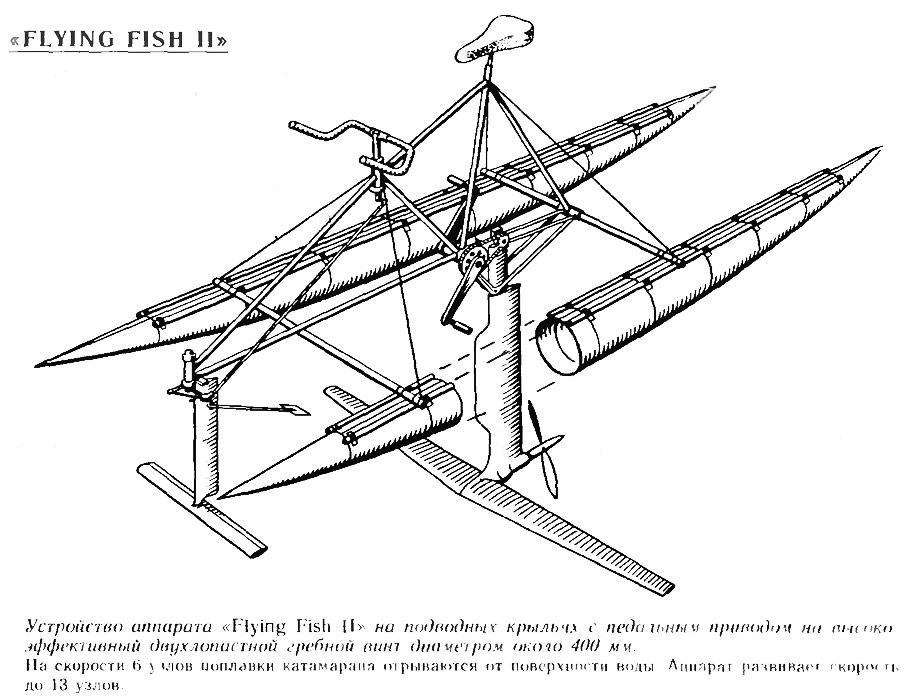
Следующий аппарат — крылатый катамаран «Flying Fish II» был создан в процессе совершенствования первоначальной модели. На этот раз мы использовали легкие водоизмещающие поплавки в надежде, что они позволят стартовать без какой-либо посторонней помощи. Это оказалось возможным. При некотором навыке при старте с места удавалось за 3 сек разогнать аппарат до такой скорости, что в работу вступали подводные крылья. Аппарат стал гораздо более практичным, поскольку теперь при окончании пробега он спокойно «приводняется» — встает на поплавки. Наш первый аппарат погружался в воду вместе с седоком, как только тот переставал крутить педали...
Аллан Абботт показал на «Flying Fish II» на 2000-метровой дистанции время 6 мин 39,44 сек. Это на 10 сек лучше рекорда весельной лодки-одиночки.
«Спринтерскую» дистанцию 250 м с ходу этот аппарат прошел за 38,46 сек, достигнув скорости около 13 узлов.
В конструировании аппаратов для передвижения по воде, использующих мускульную силу человека, наступает перелом. Некоторые новые педальные винтовые катамараны и пров, имеющие небольшой поплавок-балансир, обладают более высокими, чем наш аппарат, мореходными качествами — могут двигаться при волнении, развивают достаточно большие скорости.
Дж. Кнапп построил проа, которое движется по взволнованной поверхности быстрее, чем гоночная гребная лодка, но в отличие от нее может управляться человеком, не имеющим специальной подготовки. Аппарат «Dorycicle»— однокорпусное судно с гребным винтом, сконструированное Ф. Тьелом, способно перевозить тяжелые грузы со скоростью, вдвое превосходящей скорость его весельного прототипа — рыбачьей плоскодонки.
Независимо от того, получат ли аппараты на подводных крыльях популярность как средство развлечения и отдыха, они, несомненно, займут важное место на следующем этапе борьбы за рекорды скорости на воде. Международная ассоциация по развитию средств передвижения, использующих мускульную силу человека, поощряет участие таких аппаратов в соревнованиях на суше, на воде и в воздухе, не налагая никаких ограничений на их конструкцию. Проведение подобных соревнований, несомненно, будет способствовать дальнейшему повышению скоростей.
Мы вряд ли ошибемся, если скажем, что аппараты рассматриваемого типа смогут достигнуть скорости 20 узлов — в 1,5 раза большей, чем у «Flying Fish II», и значительно превышающей скорость обычной академической лодки с восемью атлетически сложенными гребцами.
Примечания
1. Перепечатка (с незначительными изменениями) статьи американских авторов, опубликованной в журнале «В мире науки» (1987, №2).
2. Авторы не упоминают работы других изобретателей, например англичанина Дэвида И. Оуэрса. В «КиЯ» №110 в статье Кэвина Десмонда рассказывалось об устройстве имеющей подводные крылья одноместной 4,6-метровой байдарки с положением спортсмена «лежа на спине» и педальным приводом и а гребной винт диаметром 305 мм.