
Появление кавитации (от лат. cavitas — пустота) обусловлено тем, что при высоких значениях скорости обтекающего лопасть потока давление воды на ее засасывающей (выпуклой) стороне становится значительно ниже статического на данной глубине; при падении давления до соответствующего давлению парообразования вода уже не может сохранить нормальное состояние — вскипает, на поверхности лопасти начинают образовываться пузырьки — полости, заполненные парами воды и растворенными в ней газами.
Пока эти кавитационные полости невелики по размерам, они не оказывают существенного влияния на общую картину обтекания и работы гребного винта. Его гидродинамические характеристики на этой стадии, которую принято называть первой стадией кавитации, еще не изменяются, — остаются теми же, что и при бескавитационном обтекании. Вредными последствиями кавитации на первой ее стадии являются: эрозионное разрушение лопастей (выкрашивание материала под воздействием высокого давления в точках, где пузырьки лопаются — исчезают), возникновение кавитационного шума, возрастание вибрационных усилий, передаваемых работающим винтом на корпус.
С дальнейшим увеличением числа оборотов винта и скорости обтекающего потока протяженность кавитационных полостей увеличивается и при некотором значении скорости наступает вторая стадия кавитации: засасывающая поверхность лопасти оказывается полностью охваченной одной большой полостью — каверной. Эрозионные разрушения при этом уже не возникают, так как каверна замыкается не на лопасти, а в потоке позади нее, но изменение картины обтекания винта приводит к тому, что его упор и вращающий момент уменьшаются, к. п. д. винта падает. Проведенные сравнительные испытания позволили уточнить, что падение к. п. д. гребного винта вследствие развития кавитации может составлять 10—20% его первоначального значения.
С конструктивными мерами, позволяющими уменьшить вредное влияние кавитации на работу винта быстроходного судна (практически эта проблема остается актуальной для всех гоночных судов — от скутера до многометрового газотурбинного катера, участвующего в океанских гонках), читателей знакомит кандидат технических наук Николай Владимирович Корытов.
Сильно развитую вторую стадию кавитации (рис. 1), когда обтекание лопасти происходит со срывом струй и каверна уходит далеко за край лопасти, обычно называют суперкавитацией.
Режим работы гребного винта в условиях кавитации определяется относительной поступью
и числом кавитации
где P0 = Ра + γhs — статическое давление на глубине погружения оси винта hs;
Ра — атмосферное давление;
Pd — давление насыщенных паров воды;
γ — удельный вес воды;
vp = v(1—ω) — скорость потока в диске гребного винта;
ω — скорость попутного потока;
ρ — массовая плотность воды.
По мере уменьшения значения сто. т. е. с увеличением скорости vp возникает кавитация первой стадии, затем она переходит в кавитацию второй стадии и, наконец, при значениях числа кавитации ниже 0,4 наступает режим суперкавитации.
Вплотную с явлением кавитации гребных винтов в практике кораблестроения столкнулись в 1894 г. при ходовых испытаниях нового английского миноносца «Дэринг», на котором впервые были установлены не паровые машины, а турбины, работающие на значительно больших числах оборотов. Корабль не смог развить проектную скорость полного хода 27 узлов. Вначале предполагали, что причинами недобора трех узлов скорости являются повышенное сопротивление корпуса и неполадки в работе главных двигателей. Однако проведенное тщательное изучение работы двигательно-движительного комплекса на режиме полного хода позволило ученым заключить, что истинной причиной является падение упора гребного винта и резкое снижение его к. п. д. вследствие развития кавитации на засасывающей поверхности лопастей.
Инженеры английской верфи, построившей «Дэринг», все-таки сдали корабль Адмиралтейству, но для этого им пришлось изготовить новые гребные винты с гораздо большей площадью лопастей. Благодаря повышению площади лопастей удалось уменьшить разрежение на их засасывающей поверхности и тем самым избежать появления больших кавитационных каверн.
Увеличение площади лопастей винтов в течение ряда лет оставалось единственным путем борьбы с кавитацией. Вначале эта идея была реализована весьма оригинальным способом: судостроители стали увеличивать число гребных винтов. Так, на каждом из трех гребных валов экспериментального судна «Турбиния», построенного в 1897 г. (и ныне восстановленного в качестве музейного экспоната), было установлено по три одинаковых винта один за другим. Однако через восемь лет конструктор «Турбинии» — изобретатель паровой турбины Парсонс сумел получить на том же судне ту же самую рекордную для тех лет скорость 34 узла уже не с девятью, а с тремя, но широколопастными винтами.
До недавнего времени кавитация рассматривалась как серьезный барьер на пути применения легких высокооборотных двигателей на быстроходных катерах. Усилия конструкторов были направлены на то, чтобы предотвратить возникновение и развитие кавитации на лопастях винта путем рационального выбора распределения шага по радиусу и формы профиля поперечных сечений лопасти, а также увеличения площади лопастей. Поэтому на катерах, как известно, получили применение широколопастные гребные винты, общая площадь лопастей которых нередко превышала площадь диска, описываемого винтом.
Однако при значениях скорости хода свыше 50 узлов неизбежно наступает момент, когда этот путь становится неприемлемым, поскольку дальнейшее увеличение площади лопастей приводит к существенному росту потерь мощности на преодоление их сопротивления трения. При очень большой площади лопастей эти потери возрастают настолько, что к. п. д. спроектированного таким образом некавитирующего гребного винта оказывается меньше, чем винта, хотя и кавитирующего, но имеющего меньшую площадь лопастей. В связи с этим возникла необходимость в разработке специально для быстроходных катеров гребных винтов какой-то иной конструкции, спроектированных для работы в условиях сильно развитой кавитации.
В начале 40-х годов известный советский ученый-кораблестроитель академик В. Л. Поздюнин предложил использовать специальные гребные винты, рассчитанные на работу в режиме суперкавитации.
Напомним, что у обычных гребных винтов, как и у подводного крыла, большая часть возникающей на элементе лопасти подъемной силы (до 2/3) создается за счет разрежения на засасывающей поверхности и меньшая — за счет давления на ее нагнетающей поверхности. При сильно развитой кавитации и, тем более, суперкавитации, когда вся засасывающая поверхность лопасти охвачена каверной, основная часть упора гребного винта создается за счет давления на нагнетающей поверхности. Профилировка засасывающей поверхности лопасти в этом случае, с точки зрения гидродинамики, значения не имеет: ее форма лишь должна способствовать образованию каверны оптимальных размеров, при которой сопротивление формы профиля сечения лопасти будет наименьшим.
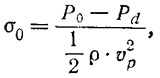
Исходя из этого В. Л. Поздюнин предложил для суперкавитирующих гребных винтов (сокращенно — СКВ) клиновидный профиль сечения лопасти с искривленной нагнетающей поверхностью (рис. 2, б), обладающий в интересующем нас режиме суперкавитации более высоким гидродинамическим качеством (отношением подъемной силы к сопротивлению), чем профили с плоской нагнетающей поверхностью, обычно применяемые для некавитирующих винтов. Из других конструктивных особенностей СКВ можно отметить наличие острой входящей кромки и смещение наибольшей толщины к выходящей кромке: клиновидные профили такой формы позволяют уменьшить толщину каверн, образующихся в междулопастном пространстве, и благодаря уменьшению их взаимного вредного влияния повысить гидродинамические характеристики винта.
Рассматривая упрощенную гидромеханическую модель СКВ, В. Л. Поздюнин получил теоретические зависимости упора и идеального к. п. д. такого винта.
Идеи В. Л. Поздюнина были впоследствии развиты другими советскими и иностранными учеными и получили практическое применение на целом ряде быстроходных глиссирующих катеров, на судах на подводных крыльях и судах на воздушной подушке с неполным отрывом корпуса от поверхности воды (скегового типа).
Например, для канадского глиссирующего катера водоизмещением 8,5 т, на котором установлена газовая турбина мощностью 1800 л. с., был спроектирован трехлопастной СКВ, имеющий диаметр D=0,45 м, шаговое отношение H/D=1,53, дисковое отношение А/Аd=0,44. Этот винт обеспечивает скорость хода 50 узлов при числе оборотов гребного вала n=3000 об/мин. (При испытаниях катера лопасти винта получили повреждения в виде отгиба тонких входящих кромок; пришлось увеличить их толщину, однако это ухудшило гидродинамические характеристики винта.)
Английская фирма «Воспер» эксплуатирует несколько быстроходных (55—60 узлов) катеров, оборудованных СКВ. Известно, что СКВ установлен и на экспериментальном американском судне «Денисон» водоизмещением 90 т; одновальная газотурбинная установка мощностью 14000 л. с. обеспечивает ему скорость хода около 60 узлов.
Несколько вариантов СКВ было разработано для опытного канадского корабля ПЛО «FHE-400» водоизмещением 200 т. Принятый и испытанный в натурных условиях трехлопастной СКВ имеет D=1,22 м; число оборотов на полном ходу (60 узлов) n=2000 об/мин; H/D=1,232; A/Ad=0,467; к. п. д. ηр=0,55. Движительный комплекс этого корабля состоит из двух СКВ, привод которых осуществляется от одной газовой турбины мощностью 22000 л. с. Гребные винты создают достаточный упор и на режиме выхода корабля на крылья (σ0=2,7; n=1700 об/мин; vs = 20 узлов).
Как видно из приведенных примеров, СКВ имеют сравнительно небольшую площадь лопастей — дисковое отношение А/Ad=0,45÷0,55; лопасти их узкие, а число лопастей делают минимальным (две или три), чтобы уменьшить вредное взаимное влияние каверн, развивающихся на отдельных лопастях.
Применение СКВ целесообразно лишь при вполне определенном сочетании значений относительной поступи гребного винта и числа кавитации. В зависимости от числа оборотов гребного винта его нагрузка при одном и том же диаметре может изменяться в значительных пределах; изменение же нагрузки винта приводит к изменению характера развития кавитации. В связи с этим могут изменяться и пределы скоростей, при которых применение СКВ целесообразно. Области целесообразного применения СКВ и обычных винтов иллюстрируются диаграммой (рис. 3).
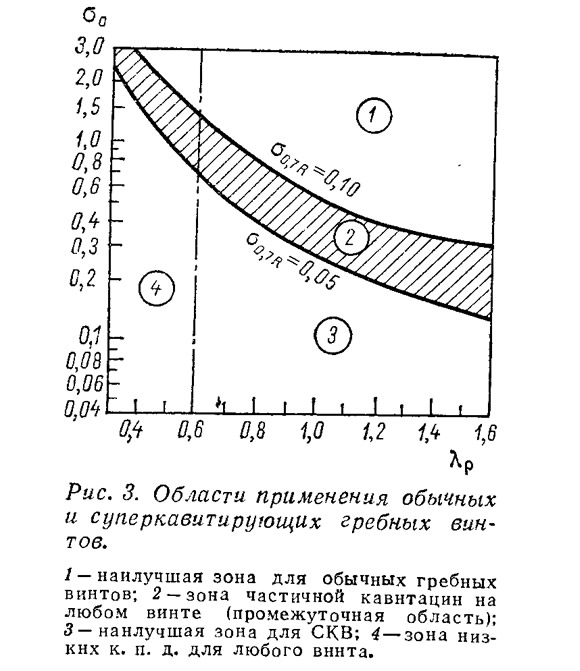
Можно заметить, что при некотором вполне определенном числе кавитации в одном диапазоне значений λр необходимо применение СКВ, в другом — обычных гребных винтов. Промежуточная область 2 определяет такие режимы работы, при которых будет наблюдаться частичная кавитация на лопастях как обычных, так и кавитирующих винтов. Эта область ограничена двумя кривыми, которые соответствуют значениям местного числа кавитации на относительном радиусе x=r/R=0,7 (R — радиус винта, r — радиус сечения лопасти) σ0,7=0,05 и 0,10.
Местное число кавитации σx, определяемое осевой скоростью потока vр и окружной π·x·n·D, рассчитывается по формуле:
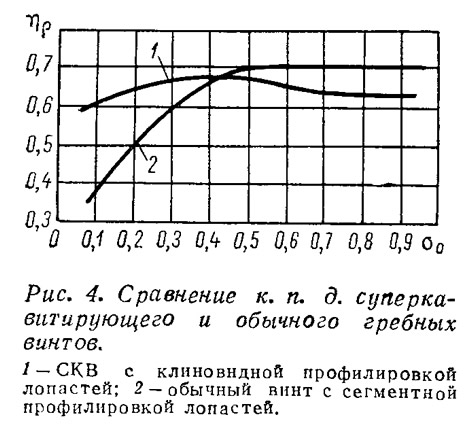
Диаграмма, приведенная на рис. 3, позволяет оценить проектируемый винт в отношении кавитации при различных условиях эксплуатации судна. Пользуясь этой диаграммой и имея зависимость σ0=f(vs), можно определять для различных типов катеров диапазон скоростей хода и чисел оборотов, при которых оказывается целесообразным применение СКВ. Для быстроходных глиссирующих катеров этот предел определяется значениями vs>50—60 узлов (в зависимости от относительной поступи λр). При таких скоростях хода, когда применение гребных винтов с обычной профилировкой лопастей, свободных от кавитации, становится практически невозможным, СКВ может иметь достаточно высокий к. п. д. (рис. 4).
На ранних стадиях проектирования, когда элементы гребного винта еще неизвестны, для приближенной оценки необходимости применения СКВ на быстроходных vs≥55÷60 узлов) катерах можно использовать условие:
где n — число оборотов гребного винта в секунду;
Ne — мощность двигателя, л. с.
При эксплуатации ряда опытных образцов СКВ оказывалась недостаточной местная прочность тонкой входящей кромки клиновидных сечений лопастей. Чтобы избежать утолщения кромок, в настоящее время для изготовления СКВ применяют особо высокопрочные материалы — титановые сплавы, которые одновременно обеспечивают и необходимую стойкость против коррозии в морской воде.
Сейчас, когда накоплен уже некоторый опыт применения СКВ, можно отметить их следующие достоинства:
- отсутствие эрозии засасывающей поверхности лопастей, поскольку замыкание каверны происходит не на лопасти, а в потоке за винтом;
- отсутствие (благодаря установившемуся характеру обтекания лопастей в режиме глубоко развитой кавитации) гидродинамических усилий импульсного характера, являющихся источником вибрации корпуса с частотой, не кратной числу оборотов винта;
- возможность применения высокооборотных двигателей, работающих непосредственно на винт; исключение редукторных передач позволяет уменьшить вес энергетической установки судна.
Эти положительные качества СКВ наиболее полно проявляются при работе винта на расчетном режиме, когда обтекание лопастей происходит при полностью развитой кавитации. Однако на режимах бескави-тационного обтекания или при частично развитой кавитации происходит повышенное вихреобразование позади тупой выходящей кромки лопастей СКВ с клиновидными поперечными сечениями. Вследствие этого к. п. д. СКВ на промежуточных скоростях движения катера оказывается ниже, чем обычных винтов с сегментной профилировкой лопастей. Это хорошо видно на рис. 4, где показано изменение к. п. д. суперкавитирующего и обычного винтов, имеющих одинаковые геометрические элементы и отличающихся лишь формой сечения лопастей, в зависимости от числа кавитации. При развитии кавитации с увеличением скорости обтекания к. п. д. СКВ изменяется слабо, а обычного винта — резко уменьшается. Так, при σ0=0,2 СКВ оказывается на 40% эффективнее, однако уже при σ0=0,4 он уступает обычным гребным винтам.
Для улучшения пропульсивных качеств СКВ на промежуточных скоростях сейчас предлагается целый ряд конструктивных решений. Одним из таких средств является искусственная кавитация винта: в кавитационную полость подается воздух или иной газ, благодаря чему гидродинамические характеристики лопасти (и тем самым винта в целом) изменяются в желаемом направлении.
Обратимся к формуле числа кавитации, из которой видно, что его значение зависит как от скорости vp, так и от давления водяных паров Рd в каверне. Повышая давление в каверне путем поддува в нее воздуха или газа, можно добиться существенного снижения числа кавитации без увеличения скорости vp.
Правда, для лопастей таких винтов (они получили название вентилируемых) необходимо применение специальных профилей поперечного сечения.
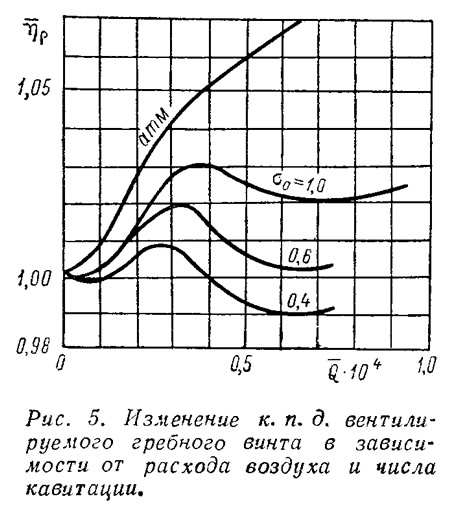
Исследования, проведенные Ю. М. Садовниковым на моделях винтов1, показали, что наиболее практичен способ вентиляции СКВ путем подачи воздуха к тупой выходящей кромке лопастей (рис. 2, в). При оптимальном расходе воздуха удается получить некоторое увеличение упора и уменьшение вращающего момента, к. п. д. винта возрастает. На рис. 5 в качестве примера показано изменение относительного к. п. д. модели вентилируемого винта:
в зависимости от безразмерного расхода воздуха Q при постоянном значении относительной поступи λр=0,95 и различных числах кавитации.
Вентилируемые СКВ способны воспринимать высокие удельные нагрузки. Например, винт диаметром 1,2 м может развивать упор Р=18000 кгс, что соответствует удельной нагрузке:
Работа таких винтов отличается меньшими, чем у кавитирующих, шумностью и вибрационными нагрузками, передаваемыми на корпус. Благодаря возможности развивать высокие обороты вентилируемый винт имеет малый диаметр, а вес и габариты редукторной передачи получаются гораздо меньше, чем у обычных кавитирующих винтов.
Информация об изображении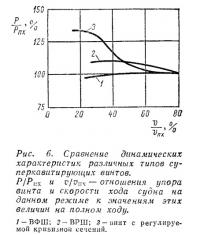
Рис. 6. Сравнение динамических характеристик различных типов суперкавитирующих винтов
Другим средством повышения эффективности СКВ на промежуточных скоростях хода является применение сечений с регулируемой кривизной (см. рис. 2, г). В этом случае лопасть винта проектируется по типу крыла с изменяемой геометрией. На малых скоростях хода, равных 40—50% расчетной, передняя часть сечения такой лопасти, поворачиваясь относительно оси, проходящей примерно через середину хорды, занимает положение, обеспечивающее увеличение кривизны профиля. Это позволяет увеличить силу упора винта (до 35—40%) по сравнению с СКВ, имеющим фиксированную кривизну сечений лопасти (рис. 6). На режиме полного хода обе части сечения лопасти образуют единый профиль оптимальной кривизны. Из-за ряда трудностей конструктивного характера, связанных с обеспечением поворота части лопасти (возникающие при этом гидродинамические моменты весьма значительны), до практической реализации этой идеи на катерах, по-видимому, еще пройдет немало времени.
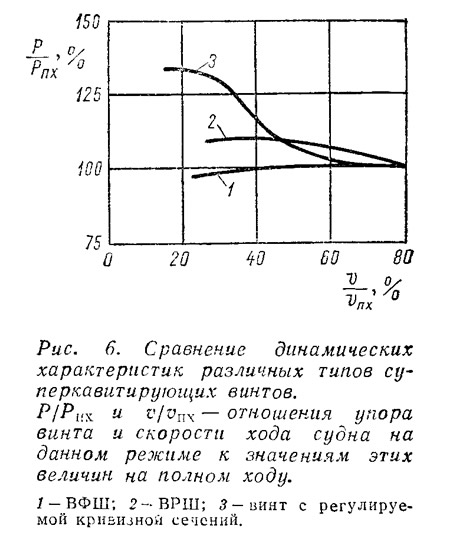
Рис. 6. Сравнение динамических характеристик различных типов суперкавитирующих винтов
Регулирование характеристик СКВ может быть достигнуто также изменением установочного шага лопастей винта на различных ходовых режимах катера путем их поворота — как это делается на обычных винтах регулируемого шага (ВРШ). При работе такого винта на расчетном режиме, т. е. при установке лопастей на заданный шаг, его характеристики будут равнозначны характеристикам СКВ фиксированного шага. Однако при всех других значениях шагового отношения сечения лопасти обычной клиновидной формы уже не будут оптимальны, что приведет к некоторому снижению к. п. д. СКВ. Поэтому для таких СКВ необходима разработка специальных суперкавитирующих профилей. Тем не менее, в печати сообщалось, что на американском опытном 100-тонном СВП скегового типа «SES-100В» установлены два суперкавитирующих ВРШ, имеющих следующие характеристики: D=1,07 м; n=2650 об/мин; число лопастей — шесть. Привод винтов осуществляется от трех газовых турбин мощностью по 4500 л. с. На ходовых испытаниях этого катера в 1973 г. была достигнута скорость хода 70 узлов.
Примечания
1. См. книгу И. Т. Егорова, Ю. М. Садовникова и др. «Искусственная кавитация». Л., «Судостроение», 1971 г.