
Установка ЧПВ на глиссирующем судне позволяет частично или полностью устранить сопротивление выступающих частей движительного комплекса, которое для малых судов водоизмещением 0,3—1,5 т на скорости 50—60 км/ч составляет 10—30%, на скорости 80—90 км/ч — 25—60%, а на скоростях 110—130 км/ч — уже 50—100% (и более) сопротивления собственно корпуса судна. (Меньшие значения относятся к установкам с наклонными гребными валами, большие — к угловым колонкам.) Некоторое (на 10—15%) уменьшение к. п. д. по сравнению с полностью погруженными винтами вполне компенсируется этим снижением сопротивления движению.
Ориентировочно можно считать, что применение ЧПВ при погружениях винта 0,3—0,5 диаметра на катерах с двигателями мощностью от 10 до 100 л. с. эффективно при скоростях, превышающих соответственно 45—60 км/ч — при установках с угловыми колонками и 60—80 км/ч — с наклонными гребными валами.
Преимущества ЧПВ уже давно используются гонщиками на скутерах и глиссерах. В последние годы, после снятия ограничений по обводам днища мотолодок, когда большинство из них стало выполняться по трехточечной или катамаранной схемам, ЧПВ стали применяться и на спортивных судах этих типов. Использование ЧПВ дало возможность увеличить скорость мотолодок почти в 1,3—1,5 раза.
Однако спортсмены, используя по традиции двухлопастные винты, встретились и со специфическими трудностями. Особенность ЧПВ — более жесткие требования к прочности лопастей, гребного вала и остальных элементов механической передачи. Знакопеременные динамические нагрузки, возникающие при поочередной работе лопастей, приводят к усталостным разрушениям гребных валов, а кроме того, увеличиваются и нагрузки на лопасть: повышаются значения упора, создаваемого (даже при трех- или четырехлопастном винте) только на одной лопасти.
В предлагаемой вниманию читателей статье канд. техн. наук И. В. Корыт о в а обобщается опыт применения ЧПВ на скоростных судах и даются некоторые рекомендации по расчету и конструированию ЧПВ.
Идея применения гребных винтов, работающих в условиях частичного погружения, когда лопасти пересекают свободную поверхность воды, известна давно. Сто лет назад запатентованы первые конструктивные схемы частично погруженных винтов (ЧПВ), которые предлагалось тогда устанавливать на речных судах с ограниченной осадкой. Применение ЧПВ обеспечивало повышение проходимости этих судов благодаря уменьшению габаритной осадки и лучшей защите движителей от повреждений при плавании в условиях мелководья.
В последнее время проблема использования ЧПВ становится все более актуальной в связи с развитием новых принципов движения быстроходных судов. Применение ЧПВ на глиссирующих катерах, судах на подводных крыльях и на воздушной подушке позволяет уменьшить угол наклона гребного вала и тем самым снизить вредное влияние косого потока на работу винта (особенно в условиях кавитационного обтекания); дает возможность уменьшить или даже исключить сопротивление выступающих частей — гребных валов и их кронштейнов; в ряде случаев позволяет устранить опасность эрозионного разрушения винта, поскольку вызывающая его парогазовая кавитация переходит в атмосферную.
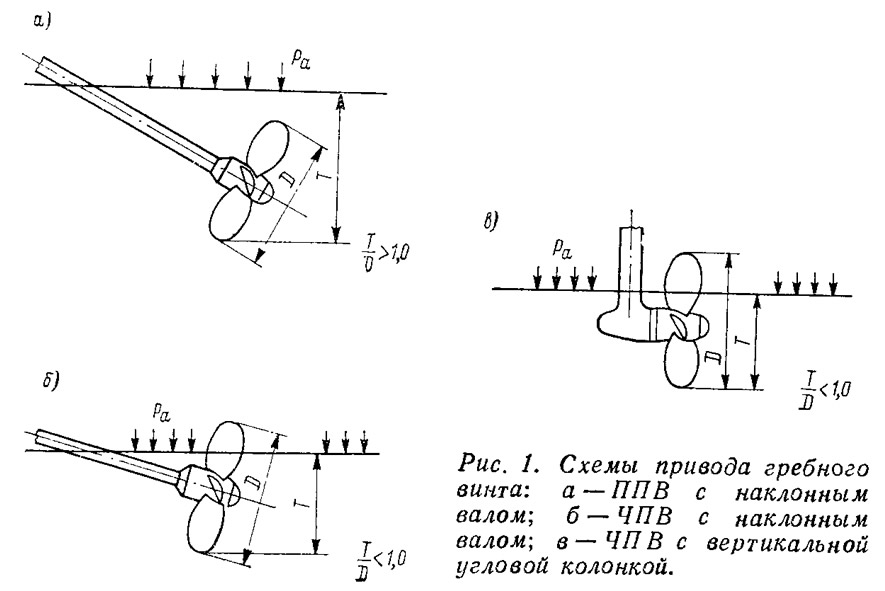
Как показывают расчеты, при скорости 80 уз использование наклонного гребного вала для привода полностью погруженного винта — ППВ (рис. 1,а) снижает пропульсивный коэффициент катера на величину до 10—20% вследствие увеличения гидродинамического сопротивления. Применение же ЧПВ при гораздо меньшем наклоне гребного вала (рис. 1,6) или в сочетании с вертикальной колонкой (рис. 1,а) существенно уменьшает эти потери.
Установка ЧПВ на судах на подводных крыльях обеспечивает значительное повышение живучести движительного комплекса, так как уменьшается вероятность повреждений гребных валов и винтов; кроме того, снижается неблагоприятное влияние винта на гидродинамические характеристики крыла, улучшается взаимодействие винта с корпусом, отсутствует эрозия винта.
ЧПВ рассматриваются как перспективный тип движителя и для высокоскоростных судов на воздушной подушке скегового типа. В США теоретические исследования и испытания моделей ЧПВ проводятся именно в связи с разработкой крупнотоннажных СВП.
Рассмотрим особенности работы ЧПВ. Известно, что гидродинамические характеристики любого подводного крыла при приближении к свободной поверхности претерпевают существенные изменения. Разрежение на засасывающей поверхности крыла падает, роль его в создании подъемной силы уменьшается. По мере уменьшения глубины погружения уменьшаются значения коэффициента подъемной силы крыла Cy и коэффициента сопротивления Сх, а при h/b<0,5 (где h — глубина погружения, b — хорда профиля крыла) возникает отрывное обтекание засасывающей поверхности крыла, которое сопровождается скачкообразным падением значения Су. При приближении к свободной поверхности изменяется и режим кавитационного обтекания крыла. Просасывание воздуха к засасывающей поверхности (аэрация) способствует созданию каверны, заполненной воздухом, что ведет к дополнительному изменению динамических характеристик крыла.
Работающий вблизи свободной поверхности гребной винт вызывает понижение уровня воды, на ее поверхности возникают волновые явления. Когда величина наибольшего понижения уровня воды станет равной глубине погружения верхней кромки лопасти винта, произойдет оголение части лопасти, площадь гидравлического сечения движителя уменьшится. Оголение лопасти приводит к нестационарному развитию подъемной силы на элементах лопасти и засасыванию воздуха в область диска винта. На быстроходных катерах изменяется и характер развития кавитации: вследствие интенсивной аэрации потока возникает атмосферная кавитация, взаимодействующая с парогазовой кавитацией. Отбрасываемая винтом струя будет состоять из смеси воды и воздуха, плотность которой меньше плотности воды, что также обусловливает изменение динамических характеристик движителя.
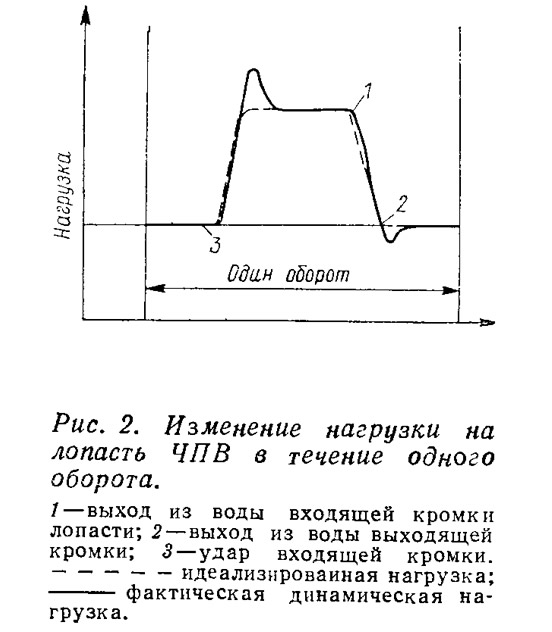
Изменение режима обтекания лопастей приводит к неуравновешенному характеру усилий и вибрационных нагрузок, действующих на лопасти ЧПВ (рис. 2). Кроме того, при каждом ударе лопасти о воду возникают большие напряжения у входящей кромки. При работе винта в условиях частичного погружения происходит смещение линии действия упора в горизонтальной и вертикальной плоскостях относительно оси гребного вала, возникает усилие, перпендикулярное оси гребного вала.
Из сказанного ясно, что для расчета ЧПВ не могут быть использованы обычные методы, применяемые при расчете гребных винтов, работающих в условиях полного погружения.
В ЛИВТе были выполнены испытания серии моделей ЧПВ, разработанной для судов на подводных крыльях и глиссирующих катеров с малой осадкой. Одной из задач исследования являлось определение влияния числа Фруда
на гидродинамические характеристики ЧПВ в зависимости от их относительного погружения Т/D (где Т — глубина погружения нижней кромки диска винта). Варьировались шаговое и дисковое отношения, число лопастей и относительное погружение ЧПВ.
Анализ полученных кривых показывает, что максимумам коэффициентов упора и момента винтов соответствуют значения критической относительной поступи

где λ1 — поступь нулевого упора.
С ростом числа Фруда максимум коэффициента упора незначительно смещается в область больших поступей. Число Фруда мало влияет на значение относительной поступи, соответствующей максимальному значению к. п. д. Приближенно по данным экспериментов это значение поступи определяется как

На изменение характеристик ЧПВ существенное влияние оказывают (особенно с увеличением числа Fr) потери на интенсивное волнообразование, а также засасывание атмосферного воздуха непосредственно в зону отрыва потока от лопасти при входе ее в воду и по вихревым шнурам, сбегающим с концов лопастей.
Для количественной оценки влияния погружения на характеристики ЧПВ величины его коэффициента упора К'1 и относительного уменьшения к. п. д. были представлены в зависимости от коэффициента упора глубоко погруженного винта K1. На основе полученных экспериментальных данных разработана расчетная схема для выбора элементов частично погруженного винта, приведенная в гл. X «Справочника по теории корабля. Судовые движители и управляемость» (Я. И. Войткунский, Р. Я. Першиц, И. А. Титов. Л., «Судостроение», 1973).
Испытанные в ЛИВТе модели винтов имели сегментную профилировку сечений и саблевидную форму контура лопасти. Поскольку на высокоскоростных катерах обычно применяют суперкавитирующие гребные винты с клиновидной формой сечений лопасти, оказывающей существенное влияние на все их характеристики, представляет практический интерес изучение работы таких винтов в условиях их частичного погружения.
В США были проведены исследования характеристик небольшой серии моделей суперкавитирующих винтов при различном их погружении. Двух- и трехлопастные винты серии имели различные значения дискового отношения A/Ad≈(0,304÷0,565), шагового отношения H/D0,7>=(1,319÷1,628) и распределения шага по радиусу лопастей. Кривизна средней линии профиля лопасти была одинаковой. Наряду с замерами упора и момента определялись вертикальное и горизонтальное смещения линии действия силы упора (так называемый эксцентриситет) и радиальное усилие на валу.
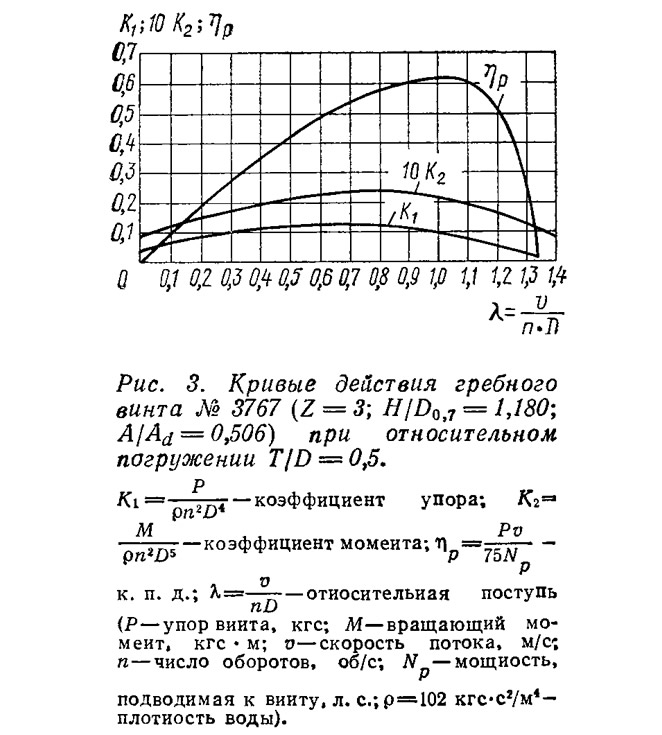
Из диаграммы кривых действия модели № 3767 (рис. 3) видно, как и у ЧПВ с обычной профилировкой лопастей, наличие максимума упора и момента при некотором значении относительной поступи.
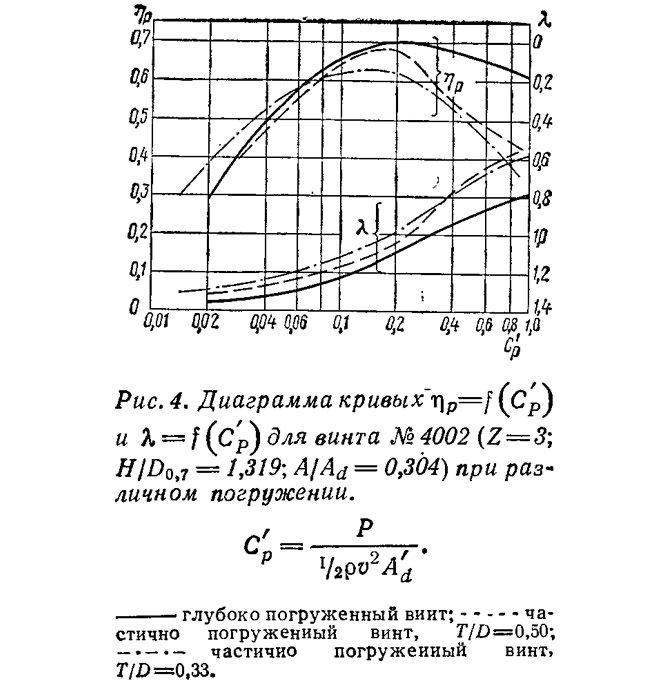
Сравнение характеристик винта при частичном и полном погружении было сделано пересчетом экспериментальных данных с использованием коэффициента нагрузки по упору С'р, определяемого по фактически погруженной площади диска винта A'd.
Характеристики модели № 4002 в виде зависимостей к. п. д. и относительной поступи при различных относительных погружениях от коэффициента нагрузки С'р (рис. 4) показывают, что значения максимума Цр для ЧПВ и ППВ сравнимы, однако область значений С'р, в которой ЧПВ работает эффективно, значительно уже, чем для ППВ.
Для суперкавитирующего ЧПВ, как и для крыла с клиновидной формой сечений, движущегося вблизи свободной поверхности, характерно наличие двух основных режимов обтекания сечений лопасти.
Режим вентиляции у основания профиля наблюдается при малых углах атаки и характеризуется тем, что вентиляция профиля происходит в области тупой выходящей кромки, а вентилируемая область простирается далеко за лопастью винта. При этом режиме обтекания на сечениях лопасти возникает достаточно большая подъемная сила, лопасти обладают высоким гидродинамическим качеством.
При меньшей величине относительной поступи обтекание элемента лопасти происходит в режиме полной вентиляции. Область вентиляции возникает у тонкой входящей кромки профиля сечения, поэтому вся засасывающая поверхность его оказывается полностью вентилируемой атмосферным воздухом. В этом режиме наблюдается уменьшение подъемной силы сечения лопасти и соответственно снижение качества.
Как показали испытания модели № 3768 (Z=3; H/D0,7=1,180; А/Аd=0,506), первый из указанных режимов наблюдается при λ=0,75, а второй — при λ=0,35. Между этими двумя основными режимами может существовать еще и режим частичной вентиляции, при котором кавитационная полость на засасывающей стороне профиля по размерам не превосходит длины хорды; при этом силы и моменты носят неустановившийся характер.
На рис. 5 показан характер обтекания лопастей модели ЧПВ при различных режимах их вентиляции. В процессе этих испытаний изменялись степень иагруженности винта (за счет измеиеиия X) и относительное погружение его оси.
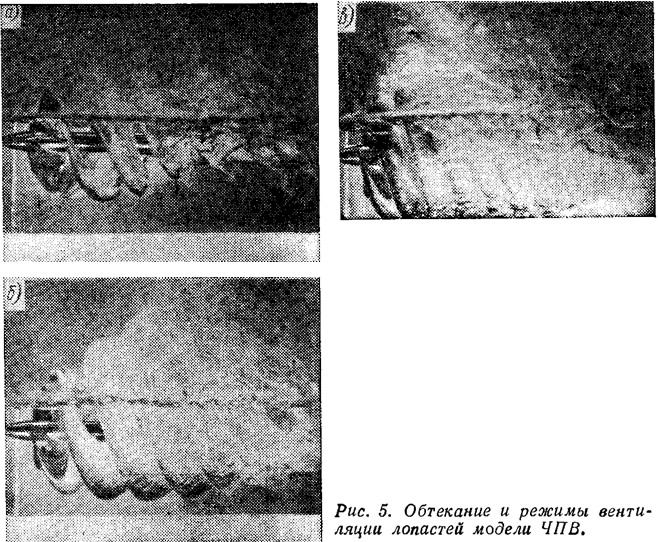
Как видно на рис. 5, а, у слабо нагруженного винта имеет место частичная вентиляция через концевые вихри, сбегающие с лопастей; при этом возможно возникновение также частичной кавитации на лопастях. С увеличением нагрузки (уменьшением 7.) степень вентиляции погруженной в воду части лопастей возрастает (рис. 5,6), брызгообразование постепенно смещается вперед, вибрационные нагрузки уменьшаются. На рис. 5, в показано возникновение на лопастях наряду с вентиляцией и полностью развитой кавитации.
Режим обтекания лопастей ЧПВ оказывает влияние также и на характер смещения линии действия силы упора винта. Как показали эксперименты, для винта правого вращения в режиме вентиляции лопасти у основания профиля эксцентриситет силы упора в горизонтальной плоскости составляет около 5% D на правый борт, а в режиме полной вентиляции — величину того же порядка, но на левый борт. Эксцентриситет в вертикальной плоскости зависит от погружения винта: кеныпим погружениям соответствует большая его величина.
Дополнительное поперечное усилие, возникающее при работе ЧПВ, в режиме вентиляции лопасти у основания значительно больше, чем в режиме полной вентиляции, и при относительном погружении винта T/D=0,5 может достигать 40% упора. Это обстоятельство необходимо учитывать при проектировании системы передачи мощности.
Наблюдения за характером обтекания ЧПВ показали, что брызгообразование, приводящее к потерям мощности, в результате чего снижается к. п. д., особенно интенсивно в режиме вентиляции лопастей у основания.
Как показали эксперименты, для снижения значительных вибрационных нагрузок, возникающих при работе ЧПВ, целесообразно, даже в ущерб к. п. д. винта, увеличивать число его лопастей. Оптимальными, т. е. имеющими достаточно высокий к. п. д. и в то же время значительно меньше подверженными вибрации, являются пяти- и шестилопастные ЧПВ.
В США спроектированы и изготовлены два суперкавитирующих шестилопастных ЧПВ регулируемого шага диаметром 1,07 м (рис. 6) для катера на воздушной подушке «SES-100В» водоизмещением около 100 т. На два винта работают три газовые турбины мощностью по 4500 л. с. На ходовых испытаниях была достигнута скорость 70 уз при числе оборотов винтов 2600 в минуту.

На СВП скегового типа необходимо учитывать специфические особенности работы движителей, обусловленные наличием резко выраженного «горба» сопротивления при выходе на воздушную подушку. Движитель должен обеспечивать преодоление этого «горба», так как в противном случае разгон СВП до расчетной скорости окажется невозможным. Таким образом, гребной винт СВП должен работать с возможно более высоким к. п. д. в широком диапазоне скоростей хода, для чего необходимо изменение относительного погружения также в широком диапазоне (в пределах 30—40% расчетного). Эта задача может решаться различными конструктивными мерами — созданием ЧПВ с регулируемой глубиной погружения или применением скегов с изменяемой геометрией. На «SES-100В» для передачи мощности от двигателей к движителям использованы угловые колонки, размещенные за транцем скегов с изменяемой геометрией.