
Рассмотрим (в несколько упрощенном виде) схему возникновения и действия сил, уводящих гоночную лодку с курса при частично погруженном правом винте. Результирующую гидродинамическую силу У, которая создается при входе лопасти в воду, можно разложить на полезный упор Р, толкающий судно вперед, и боковую силу Rб, перпендикулярную направлению движения и поворачивающую нос судна влево. Кроме того сила Rб стремится накренить корпус лодки на левый борт, в результате чего смоченная поверхность левого спонсона увеличивается, а правого уменьшается. Сила сопротивления воды движению судна R оказывается смещенной к левому борту и образует с упором винта Р момент, также поворачивающий лодку влево.
Величина силы Rб растет с уменьшением глубины погружения винта и, как показывает опыт, при определенных условиях может достигать 15—20% упора ГВ. Например, для мотолодки класса SC-500 с подвесным мотором «Вихрь-30», движущейся со скоростью 97 км/ч при 5000 об/мин (частота вращения ГВ при редукции 14:23 n=3000 об/мин) сила Rб, приложенная за транцем лодки, достигает 7,5—9 кгс. Разумеется, ее влияние на управляемость судна оказывается значительным и нуждается в нейтрализации.

Это можно сделать, развернув подвесной мотор по отношению к ДП на угол 10—14°, то есть на значительно большую величину, чем это требуется в случае лодки с полностью погруженным ГВ (1—3°).
На приведенной схеме видно, что сила Rб, приложенная к середине лопасти ГВ, действует на плече 200—300 мм относительно оси вращения мотора и создает вращающий момент, который должен уравновешиваться усилием, прикладываемым водителем к рулю. Это усилие значительно превосходит то, которое необходимо для разворота мотора на 10—14°, и должно быть приложено в противоположную сторону. Таким образом теоретически, уменьшив плечо l, на котором приложена сила Rб относительно оси поворота мотора, можно было бы добиться значительного снижения усилия, требуемого для управления рулем на лодке с полупогруженным ГВ. Однако в существующих конструкциях моторов сделать это весьма затруднительно, да и не всегда разрешается правилами соревнований.
Необходимое компенсирующее усилие момента Rб·l может дать простой способ, который первыми начали применять ленинградские спортсмены в кратковременных гонках, проходящих на «гладкой» воде с малым количеством участников. Между рулевой тягой мотора, установленного в ДП, и корпусом судна с нужной стороны, которая зависит от направления вращения ГВ (при правом ГВ — с правой) натягивают 3—5 резиновых амортизаторов от «плечевого» эспандера, создающих общее тяговое усилие 8—15 кгс. Воспринимая на себя часть момента Rб·l, они уменьшают необходимое усилие на рулевом колесе при максимальной скорости. При движении в предстартовой зоне на средней скорости или на стоянке, усилие эспандеров «гасится» повышенным трением покоя в осях вращения мотора и рулевого колеса, которое в значительной степени уменьшается от вибрации при движении судна с полной скоростью.
При наличии волны на дистанции этот метод надо применять с осторожностью. Если ГВ станет «выскакивать» из воды, амортизаторы в условиях снижения трения будут сильно «раскачивать» рулевое колесо, что очень опасно для водителя.
Информация об изображении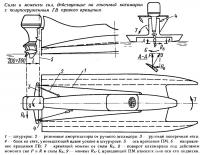
Силы и моменты сил, действующие на катамаран с полупогруженным ГВ правого вращения
В классах скутеров для компенсации усилия на руле двигатель смещается в сторону от ДП. Но в отличие от лодок с полностью погруженным ГВ, на которых, например, мотор с правым ГВ смещается к левому борту, мотор с частично погруженным ГВ необходимо смещать в сторону направления вращения, то есть правый винт смещать к правому борту. Дополнительно в ту же сторону необходимо повернуть мотор для того, чтобы судно двигалось по прямому курсу.
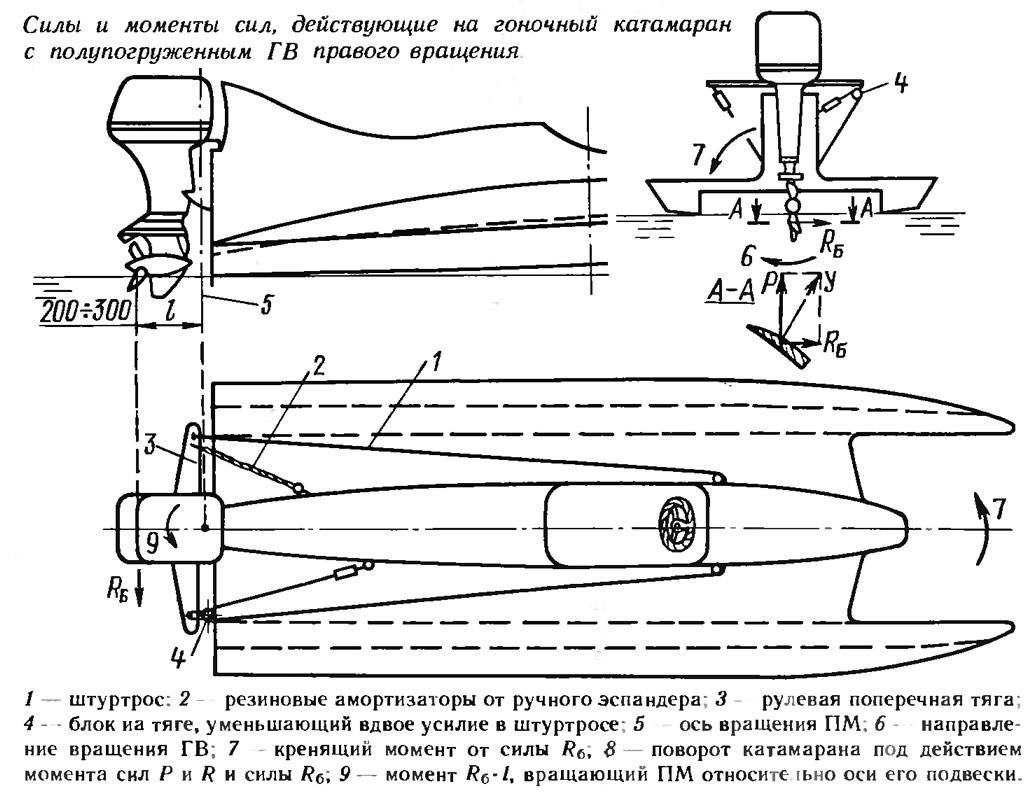
Силы и моменты сил, действующие на катамаран с полупогруженным ГВ правого вращения
Величина смещения мотора к борту для скутеров ОА-250 — 10 мм, ОС-500 — 20—25 мм; для мотолодок SB-350 — 15—20 мм.
Аналогичный эффект достигается при наклоне мотора относительно вертикали так, чтобы ось вращения ГВ оказалась смещенной в нужную сторону относительно ДП. Этот способ применяют в случаях, когда нежелательно переносить ЦТ к борту от ДП или узкий транец не позволяет сместить мотор.
На мощных скутерах с катамаранными обводами корпуса усилие на рулевом колесе можно уменьшить почти вдвое проводкой штуртроса через блоки, закрепленные на поперечных тягах. Однако на гоночных и спортивных судах с обводами «трехточки» или «глубокое V», на которых для совершения поворота требуется гораздо больший угол разворота ПЛМ, чем на катамаране, применение блоков на рулевых тягах нецелесообразно, так как водитель не сможет, «не перехватывая рук», совершить поворот.
Иногда, стремясь улучшить левый поворот, уменьшить крен лодки на прямом курсе и усилие на рулевом колесе, строят спортивные суда со смещенным на 20—50 мм в левую от ДП сторону кокпитом. Указанный метод оправдывает себя на спокойной воде. Но при средней и сильной волне, особенно если применяется ГВ правого вращения, такая лодка имеет тенденцию к «неуправляемому» повороту и даже развороту на 180°.
Если на туристских и потребительских мотолодках очень важно в целях безопасности полностью избавиться от «вредного» усилия на румпеле, может быть, даже ценой незначительной потери скорости и ухудшения поворотливости на максимальной скорости, то на гоночных судах потеря скорости и ухудшение способности поворачивать в левую сторону крайне нежелательны. В связи с этим усилие на рулевом колесе целесообразно снижать до какого-то уровня, определяемого каждым спортсменом индивидуально с учетом протяженности дистанции, состояния водной поверхности, развития собственных психофизических качеств и т. п.
Как правило, работы по снижению усилия на рулевом колесе тем или иным способом лучше проводить во время тренировочных заездов по дистанции предстоящих гонок, определяя не только максимальную (по манометру), но и, что более важно, среднюю скорость прохождения круга (по секундомеру) для каждого варианта.