
Эта статья посвящена проектированию полностью погруженных кавитирующих гребных винтов катеров, скорости которых лежат в пределах 50—80 км/ч.
Известно, что при скоростях хода катера vк=50÷80 км/ч гребные винты работают в основном в начальных стадиях кавитации и в режиме развитой кавитации на верхнем пределе указанного диапазона скоростей1. В этом случае добиться наиболее эффективной отдачи мощности двигателя можно с помощью полностью погруженных гребных винтов, у которых оптимально выбраны диаметр, шаг и профилировка лопастей. Для катеров со скоростью хода выше 80 км/ч рационально применение частично погруженных гребных винтов (ЧПГВ).
Расчеты показывают, что на скоростях 50—60 км/ч развитая кавитация гребного винта с дисковым отношением АE/А0=0,8 наступает лишь при относительно малых его шаговых отношениях (H/D<1,3); на скоростях 60—80 км/ч гребные винты работают в режиме развитой кавитации. При этом рациональная величина площади лопастей (дисковое отношение) с ростом скорости также возрастает, т. е. для каждого конкретного соотношения скорости и нагруженности гребного винта величина его дискового отношения для достижения наивысшего КПД оказывается различной. При этом в диапазоне скоростей 50—60 км/ч, как показывают расчеты, зависимость КПД гребного винта от величины дискового отношения, как и для некавитирующих винтов, относительно мала.
С наступлением развитой кавитации при скоростях свыше 60 км/ч влияние величины дискового отношения возрастает. Однако проектирование кавитирующего гребного винта с выбором помимо основных геометрических элементов также и оптимальной величины дискового отношения оказывается достаточно трудоемким, требующим использования большого количества эмпирических зависимостей.
Для упрощения выбора геометрии гребных винтов можно заранее установить постоянную компромиссную величину дискового отношения для принятого диапазона скоростей, пойдя на некоторое снижение КПД вблизи верхнего диапазона скоростей (70—80 км/ч). Как показали предварительные расчеты, эту величину целесообразно принять равной 0,80. При заданном дисковом отношении гребного винта процедура выбора его геометрии может быть сведена к снятию искомых величин с простых диаграмм.
На катерах со скоростью хода 60—80 км/ч целесообразно устанавливать трехлопастные гребные винты серии СК (см. упомянутую ранее книгу), модели которых диаметром 200 мм были испытаны в кавитационной трубе с измерением гидродинамических характеристик при различных числах кавитации. Результаты испытаний свидетельствуют о высоких пропульсивных качествах винтов этой серии, которые имеют симметричную форму контура лопасти и линейный закон изменения ее толщины вдоль радиуса.
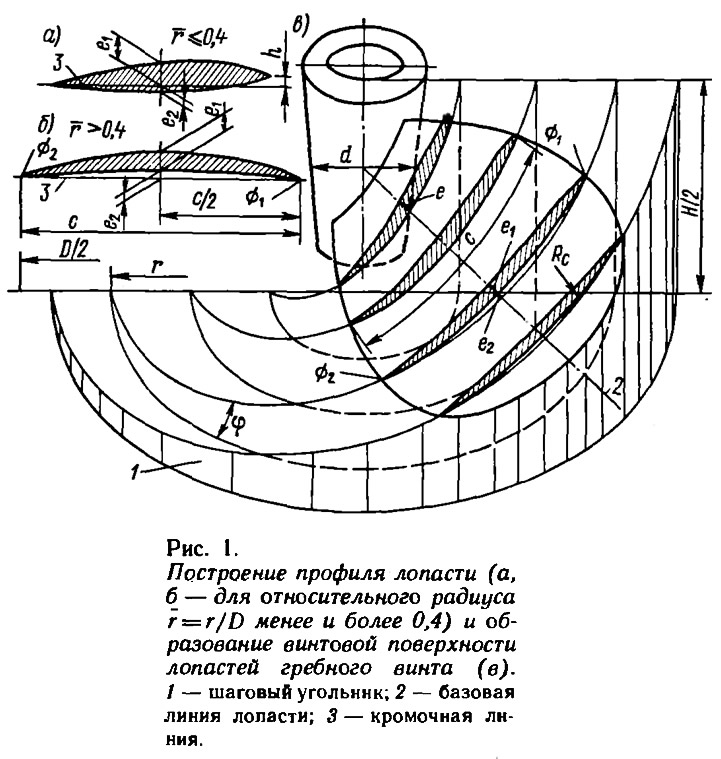
У гребных винтов, рекомендуемых для катеров, для повышения надежности и долговечности кромок концы лопастей несколько утолщены; все остальные геометрические характеристики сохранены, как на испытанных моделях винтов серии СК. Построение профилей сечений лопасти (рис. 1) выполняется для нагнетающей и засасывающей сторон соединением трех точек, рассчитанных по табл. 1, плавной кривой. В таблице приведены размерения лопасти на десяти относительных радиусах.
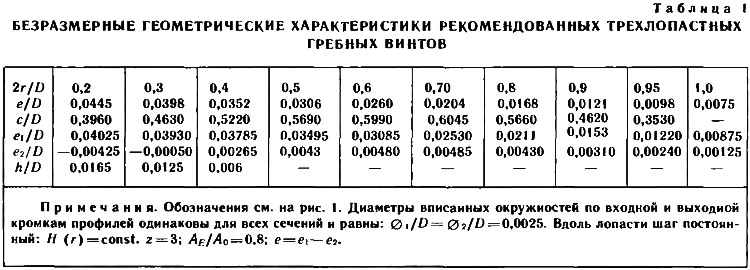
Рациональные величины диаметра и шага гребного винта в зависимости от мощности двигателя, частоты вращения гребного вала и скорости натекания воды на гребной винт ока определяются с помощью диаграмм (рис. 2—6).
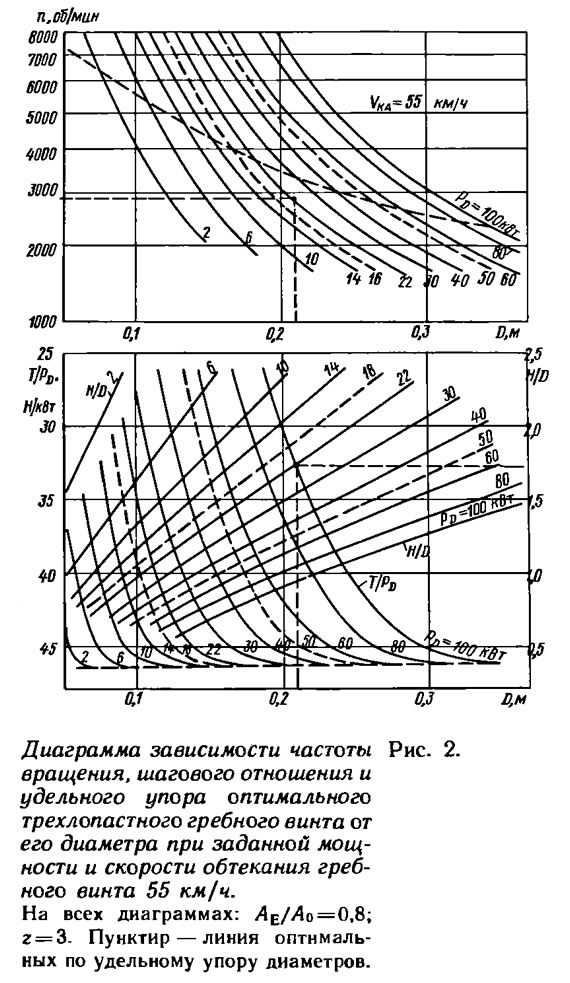
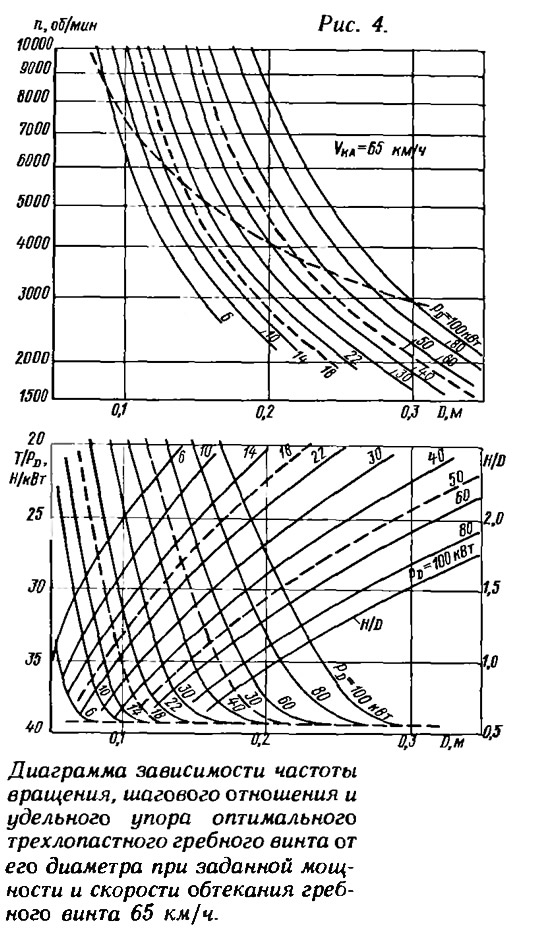
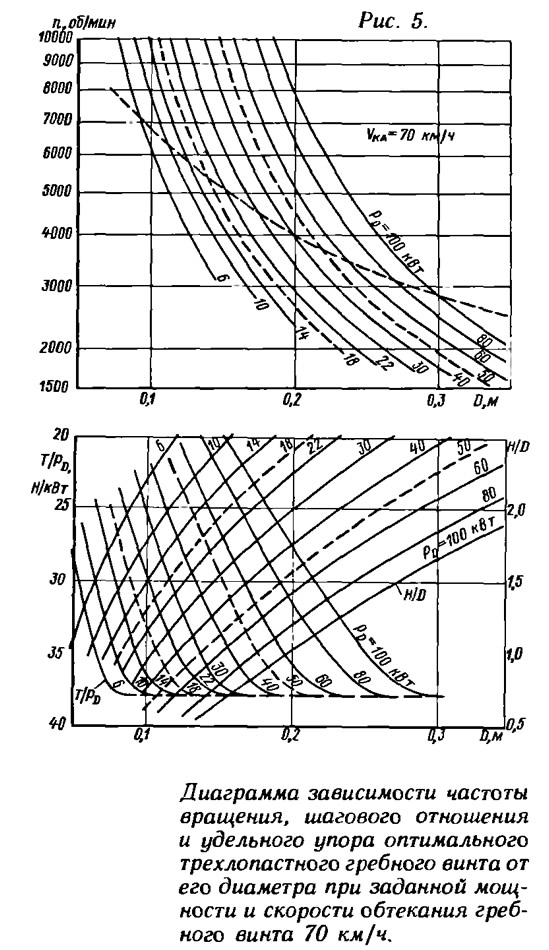
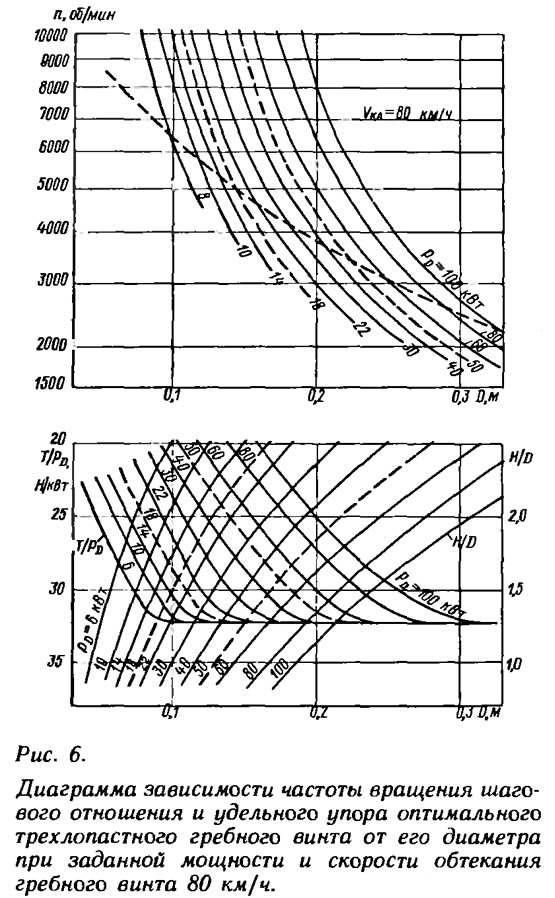
Каждая диаграмма построена для определенного значения скорости от 55 до 80 км/ч. По оси абсцисс диаграммы даны значения диаметра гребного винта, а по оси ординат в верхней части — рациональная частота вращения гребного винта n, в нижней — удельный упор гребного винта Т/РD (в Н/кВт) и шаговое отношение винта H/D; линии на диаграмме соответствуют заданной мощности, которая изменяется в пределах от 2 до 100 кВт.
Пунктирные линии в верхней и нижней частях диаграмм проведены через точки оптимальных значений диаметра и частоты вращения гребного винта, обеспечивающих при заданной мощности максимальную его тягу, а следовательно, и КПД:

Если диаметр и частота вращения гребного винта меньше оптимальных величии, удельный упор гребного винта при заданной мощности резко снижается (см. нижнюю часть диаграмм). В меньшей степени удельный упор снижается при увеличении диаметра гребного винта по сравнению с оптимальным. Можно считать, что при увеличении диаметра на 30—40% удельная тяга остается практически постоянной.
Скорость натекания воды на гребной винт отличается от скорости катера на величину попутного потока:

При использовании подвесного мотора можно принять w=0,04, а при установке винтов под днищем катера за кронштейнами валов (при стационарных двигателях) w=0,06.
Рассмотрим последовательность действий при проектировании гребного винта для конкретного судна, например, мотолодки «Винни-Пух» (см. «КиЯ» №145). Полное водоизмещение ее с одним пассажиром составляет 220 кг; на мотолодку предполагается установить подвесной мотор мощностью 30 л. с. (22,05 кВт) при частоте вращения гребного вала 2916 об/мин. Для расчета или необходима кривая буксировочного сопротивления судна, или должна быть известна его ожидаемая скорость vк по близкому аналогу. Рассмотрим первый случай задания на расчет винта.
Скорость мотолодки на основании имеющегося опыта (или по прототипу) ожидается около 50—60 км/ч. Для определения геометрических элементов гребного винта и достижимой скорости используем три диаграммы для скоростей vкА=55, 60 и 65 км/ч, сняв с них искомые значения D. Н/D и T/PD при РD=22,05 кВт и n=2916 об/мин. Коэффициент попутного потока w=0,04. Расчет удобно выполнить в табличной форме (табл. 2).
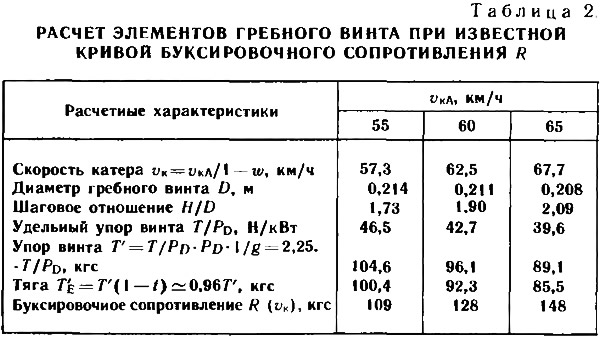
Чтобы определить тягу винта (в кгс), необходимо из величины упора вычесть силу засасывания корпуса гребным винтом:

где t — коэффициент засасывания. Для быстроходных глиссирующих катеров величину t принимают равной коэффициенту попутного потока: t=w.
Тогда для трех расчетных значений скорости получим:
Значения буксировочного сопротивления R снимаем с кривой зависимости R от vк, полученной расчетным путем.
Далее строятся кривые зависимости D, Н/D и Т'E от скорости катера vк; там же наносится кривая буксировочного сопротивления R (рис. 7). В точке пересечения кривых Т'E(vк) и R(vк) снимаются значения достижимой скорости катера vк≈56 км/ч; диаметр винта получается равным 215 мм и его шаговое отношение 1,69.
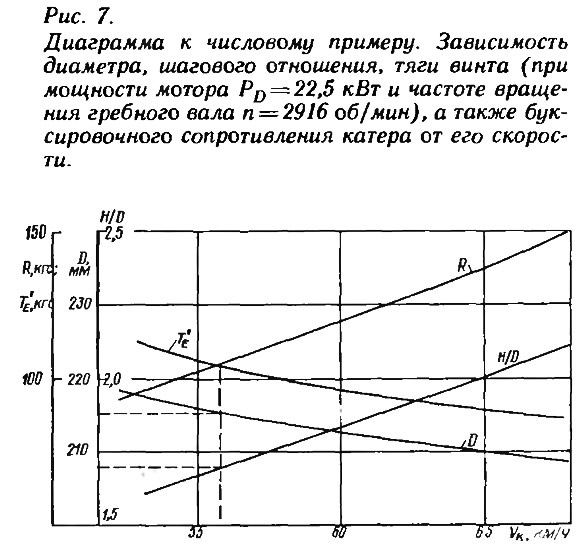
Элементы гребного винта определены и можно переходить к его вычерчиванию с использованием приведенных выше рекомендаций и таблицы, а затем и изготовлению по любой известной технологии.
Если буксировочное сопротивление катера неизвестно, искомые значения геометрических элементов гребного винта снимаются с полученных на рис. 7 кривых при заданной ожидаемой скорости хода, а расчет тяги ТE не требуется.
В заключение следует отметить, что, как показали поверочные расчеты, разработанные диаграммы обеспечивают достаточно высокую точность определения геометрических элементов гребных винтов и их тяговых характеристик.
Примечания
1. См., например, книгу М. А. Мавлюдова и др. «Движители быстроходных судов», Судостроение, Л., 1973.