Одним из способов повысить скорость моторного судна и получить экономию топлива является подбор шага гребного винта. Выпускаемые промышленностью винты изменяемого шага — мульти-питчи — позволяют установить шаг, близкий к оптимальному для какого-то определенного режима эксплуатации лодки — нагрузки и скорости. Сделать же винт регулируемого шага, который устанавливается на ходу, для подвесного мотора слишком сложно. Поэтому предлагаю идею разработать винт, у которого шаг изменялся бы автоматически — в зависимости от упора, создаваемого винтом. Это позволяет отказаться от дистанционного управления шагом и сделать винт саморегулирующимся.
В ступице винта должен быть встроен пружинный динамометр, части которого, перемещаясь под воздействием упора, поворачивали бы лопасти на определенный шаг. Если величина деформации пружины будет определенным образом согласована с диапазоном изменения упора, то такая система будет обладать обратной связью и работать автоматически.
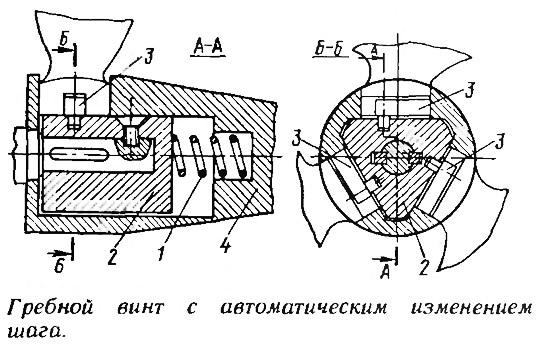
В качестве примера на чертеже представлен один из вариантов такого винта. Когда винт не вращается, пружина 1 перемещает ступицу 4 по закрепленной на гребном валу трехгранной втулке 2 назад (относительно хода судна). При этом кривошипы 3, скользящие в пазах корней лопастей и связанные своими цапфами со втулкой 2, развернут лопасти в положение максимального шага. Для ПМ «Вихрь» например, Нmax=360 мм. Когда винт начинает вращаться, появляется значительный упор, таи как судно неподвижно. Под действием упора ступица 4 перемещается вперед по втулке 2, преодолевая усилие пружины 1, а кривошипы 3 развернут лопасти в положение малого шага. Для «Вихря», например, Hmin=220 мм. Благодаря этому частота вращения винта и скорость судна быстро возрастут.
По мере возрастания скорости величина упора уменьшается и лопасти установятся в положение оптимального шага. При любом увеличении шага происходит перегрузка мотора, падение скорости судна, упор вновь возрастет и винт реагирует на это уменьшением шага.
Характеристика пружины - зависимость ее деформации от величины упора — должна быть подобрана с учетом многих факторов: нагрузочной характеристики ПМ, зависимости сопротивления судна от скорости и нагрузки, гидродинамических характеристик винта, зависимости угла поворота лопастей от перемещения частей динамометра. Решение этой задачи достаточно сложно, но конструктивное выполнение ВРШ представляется простым и технологичным. Так, например, пружину можно выполнить переменного сечения или составить из нескольких пружин, предусмотреть ее регулировку. Для гашения возможных автоколебаний лопастей может быть использован переменный объем внутри ступицы, в котором перемещается втулка 2 и который заполнен водой.
Идея, предлагаемая В. Филипповым, не нова. Среди патентов, касающихся усовершенствований гребных винтов, можно найти и подобные конструкции с автоматическим регулированием шага в зависимости от нагрузки или поступи винта. Такие винты несколько проще винтов регулируемого шага, так как здесь отсутствует привод изменения шага лопастей, располагающийся обычно внутри полого гребного вала. Однако они лишены таких достоинств ВРШ, как возможность в любых условиях установить наиболее оптимальный шаг, с филигранной точностью манипулировать величиной упора винта и скоростью хода при швартовке и буксировке других судов, давать задний ход без применения реверс-редуктора.
Вызывает сомнение пригодность такого винта для глиссирующих катеров и судов на подводных крыльях, которым в начальный период разгона приходится преодолевать повышенное сопротивление воды — так называемый «горб» сопротивления. В этот момент, который может длиться (в зависимости от обводов корпуса, центровки и размерений судна) от нескольких десятков секунд до минут, винты должны развивать максимальный упор. Если же в период разгона шаг лопастей начнет «автоматически» уменьшаться, упор винта упадет и судно на режим глиссирования или движения на подводных крыльях не выйдет.
Заметим, что, как и ВРШ, предлагаемый винт будет далеко не совершенен в гидродинамическом отношении. Увеличенный диаметр ступицы, толщина корневых сечений лопасти, наконец — работа лопастей под не оптимальными углами атаки при их развороте из положения начального шага, на который рассчитана геометрия лопасти — все это снижает КПД по сравнению с винтами фиксированного шага.

- Главная
- Консультации
- Полезные устройства
- 1988 год
- Саморегулирующийся гребной винт
Подкатегории раздела
Полезные устройства
Полезные советы
Улучшение судов
Улучшение моторов
Опыт эксплуатации
Техника плавания
Разбор аварий
Рыболовам
Поделитесь информацией
Похожие статьи
Гребной винт из стеклопластика
Гидравлическая передача на гребной винт
Правильно ли расположен гребной винт?
Оптимальный гребной винт для мотора и лодки
Самодельный гребной винт «мульти-питч»
Гребной винт с регулируемым шагом «мульти-питч»
Насадка на гребной винт подвесного мотора
Улучшенный самодельный гребной винт «мульти-питч»
Полезные мелочи: гребной винт, заменитель шпиля, фал...
Как изготовить гребной винт для мотолодки
Гребной винт со съемными лопастями «Эдванс-15»
Педальный привод на гребной винт лодки
Как отполировать гребной винт?
Гребной винт водоизмещающего катера
Гидравлическая передача на гребной винт
Правильно ли расположен гребной винт?
Оптимальный гребной винт для мотора и лодки
Самодельный гребной винт «мульти-питч»
Гребной винт с регулируемым шагом «мульти-питч»
Насадка на гребной винт подвесного мотора
Улучшенный самодельный гребной винт «мульти-питч»
Полезные мелочи: гребной винт, заменитель шпиля, фал...
Как изготовить гребной винт для мотолодки
Гребной винт со съемными лопастями «Эдванс-15»
Педальный привод на гребной винт лодки
Как отполировать гребной винт?
Гребной винт водоизмещающего катера
Саморегулирующийся гребной винт
Год: 1988. Номер журнала «Катера и Яхты»: 131 (Все статьи)
ПРЕДЫДУЩИЕ СТАТЬИ
Ответы ГИМС: о проверке знаний и медицинских осмотрах
Ответы ГИМС на письма читателей
Таблица путевых расстояний
Ловля налимов с подпуском на горных реках
Особенности гардероба рыболова
Лодка и экипаж приемы управления из книги «Справочник яхтсмена»
Парусное вооружение для надувной лодки типа «Славянка»
Полезные мелочи: контейнер, фанера, покрытие, футшток...
Подвесной мотор с плавниковым движителем
Консультации по моторам «Ветерок», «Москва» и «Прибой»
Подход на яхте к человеку упавшему за борт
Ответы экспертов о столкновении «Товарища» с «Алькантарой»
Кухня-палатка для лагеря на длительное время
Успехи в гонках подтвердили правильность идей А. Юданова
Усовершенствования одноместной складной охотничьей лодки
Ответы ГИМС на письма читателей
Таблица путевых расстояний
Ловля налимов с подпуском на горных реках
Особенности гардероба рыболова
Лодка и экипаж приемы управления из книги «Справочник яхтсмена»
Парусное вооружение для надувной лодки типа «Славянка»
Полезные мелочи: контейнер, фанера, покрытие, футшток...
Подвесной мотор с плавниковым движителем
Консультации по моторам «Ветерок», «Москва» и «Прибой»
Подход на яхте к человеку упавшему за борт
Ответы экспертов о столкновении «Товарища» с «Алькантарой»
Кухня-палатка для лагеря на длительное время
Успехи в гонках подтвердили правильность идей А. Юданова
Усовершенствования одноместной складной охотничьей лодки
ТЕКУЩАЯ СТАТЬЯ
Саморегулирующийся гребной винт
СЛЕДУЮЩИЕ СТАТЬИ
Полезные мелочи: гик, колпачок, ликтрос, буек...
Консультации по моторам «Нептун», «Вихрь» и «Ветерок»
Яхтенная этика и этикет как часть морской культуры
Предотвращение аварий и несчастных случаев
Буер, ложки и аэратор для зимней рыбной ловли
Будут ли девушки гоняться на швертботах класса «Луч»?
Испытания пластмассовой лодки-картоп «Онега-2»
История эксплуатации катамаранов типа «Гауя»
Тренажеры для спортсменов-парусников
Усовершенствования малой яхты заводской постройки
Яхта типа «Ассоль» с топовой оснасткой
Складной радиолокационный отражатель
Ветровое стекло из прозрачной виниловой пленки
Полезные мелочи: вырезка отверстий, педаль газа, карабин, винт...
Обрастание днища судна: болезнь и лечение
Консультации по моторам «Нептун», «Вихрь» и «Ветерок»
Яхтенная этика и этикет как часть морской культуры
Предотвращение аварий и несчастных случаев
Буер, ложки и аэратор для зимней рыбной ловли
Будут ли девушки гоняться на швертботах класса «Луч»?
Испытания пластмассовой лодки-картоп «Онега-2»
История эксплуатации катамаранов типа «Гауя»
Тренажеры для спортсменов-парусников
Усовершенствования малой яхты заводской постройки
Яхта типа «Ассоль» с топовой оснасткой
Складной радиолокационный отражатель
Ветровое стекло из прозрачной виниловой пленки
Полезные мелочи: вырезка отверстий, педаль газа, карабин, винт...
Обрастание днища судна: болезнь и лечение
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории