
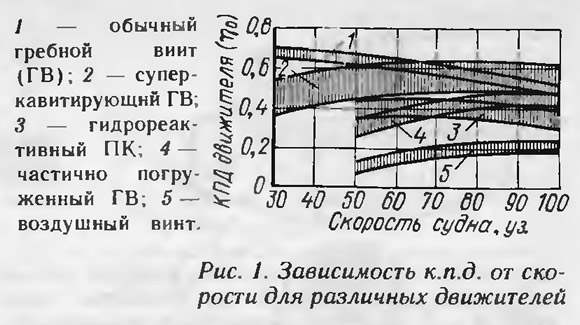
Нетрадиционные пропульсивные комплексы
Интерес как специалистов-судостроителей, так и любителей к судовым движителям, которые вместе с двигателем и корпусом судна составляют пропульсивный комплекс (ПК) судна, в последнее время заметно возрос. Например, в газете «Известия» от 4 апреля 1988 г. под заголовком «Революция в судостроении» был опубликован материал, посвященный магнитогидродинамическому ПК со сверхпроводимостью, разрабатываемому японскими специалистами. Ряд материалов, рассказывающих о необычных, не похожих на гребные винты или водометы движителях, появился и в «КиЯ»: «ленточный движитель» (№94), движители «аквасипеда» (№97), «гидролета» (№104 и №111) и использующие энергию волн (№126) и т. д. Словом, ведутся довольно интенсивные поиски движителей, которые бы могли заменить винт и водомет.
Значит ли это, что на сегодня возможности этих традиционных для судостроения движителей исчерпаны? Отнюдь нет.
После того, как в прошлом веке винт полностью вытеснил гребное колесо, он постоянно совершенствовался и получил преимущественное распространение на всех видах транспортных средств, движущихся под, на и над поверхностью воды. И сегодня этот тип движителя в судостроении остается самым эффективным.
В авиации с появлением реактивной техники в середине 40-х годов пропульсивный комплекс, состоящий из двигателя внутреннего сгорания (ДВС) и воздушного гребного винта, уступил свое место турбореактивному и реактивному пропульсивным комплексам, объединяющим в одном агрегате двигатель и движитель (часто эти ПК называют не совсем правильно воздушно-реактивными двигателями — ВРД). Гребной винт в авиации полностью сохранил свои позиции лишь на вертолетах, на легкомоторных самолетах, на мотодельтапланах, а в составе турбовинтового пропульсивного комплекса — на среднескоростных и тяжелых грузовых самолетах.
На рис. 1 приведены зависимости реальных значений к. п. д. от скорости для судовых движителей различных типов. По данным автора, наибольшее экспериментальное значение к. п. д. — 0,915 достигнуто для узколопастного авиационного гребного винта. Судовые гребные винты из-за большей ширины лопастей имеют большие потери на трение о воду. При испытаниях изолированных винтов их к. п. д. достигает величины 0,8. Однако у винтов, установленных на реальные суда, из-за ограниченного диаметра обусловленного осадкой судна, к. п. д. редко превышает 0,60. Величина полного пропульсивного коэффициента1 при этом составляет около 0,3 (к. п. д. двигателя внутреннего сгорания обычно находится в диапазоне 0,40—0,50).
Для турбореактивных пропульсивных комплексов современных самолетов величина полного пропульсивного коэффициента достигает 0,25. Для речного СПК «Буревестник» с авиационным турбовинтовым двигателем и водометным движителем пропульсивный коэффициент вдвое меньше — 0,121.
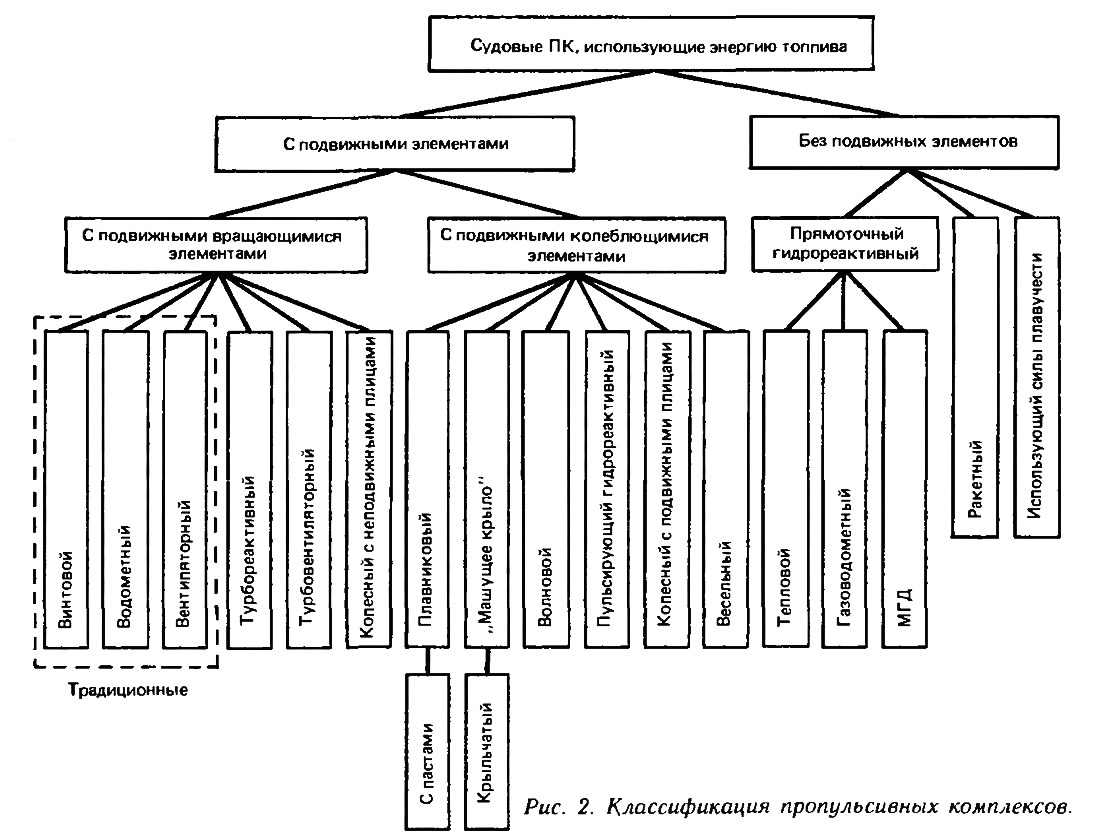
Прежде чем начать знакомство с нетрадиционными типами пропульсивных комплексов, т. е. ПК исключающими применение гребного винта или лопастного насоса, попробуем классифицировать все известные движители. Удобно их разделить на две основных группы (рис. 2): не имеющие подвижных относительно корпуса элементов (т. е. лопастей) и ПК с подвижными элементами движителя. Представителем второго вида является гребной винт. Хорошо известны основные проблемы, обусловленные наличием лопастей. За счет вращения винта скорость обтекания лопастей во много раз превышает скорость судна. При таких скоростях возникает явление кавитации (см. «КиЯ» №129), отрицательно сказывающееся на к. п. д. движителя, разрушающее поверхность лопастей. Для уменьшения влияния кавитации нужно уменьшить толщину лопастей и увеличить их площадь но здесь судостроители оказываются перед проблемой обеспечения прочности сильно нагруженных лопастей, консольно закрепленных на ступице винта.
В той или иной степени эти проблемы присущи и другим видам лопастных движителей — водометному ПК и др. А если взять воздушный винт, то возникает проблема борьбы с шумом, резко усиливающимся при сверхзвуковых скоростях обтекания периферийных элементов лопастей. Излишне говорить об эксплуатационных неудобствах, которые создают подвижные относительно корпуса элементы пропульсивного комплекса.
Однако возможно ли вообще создать пропульсивный комплекс без подвижных элементов! Оказывается, возможно и вполне реально. Пока такие комплексы еще не нашли широкого применения в судостроении, но в авиации и космонавтике они используются давно и успешно. Это, прежде всего, прямоточный реактивный авиационный ПК и ракетный ПК. В судостроении аналог реактивного авиационного ПК обычно называют гидрореактивным, хотя, если говорить точно, по принципу создание тяги и гребной винт является тоже гидрореактивным движителем.
По мере развития авиации установили, что масса поршневого ДВС, работающего на винт, приблизительно пропорциональна его мощности. А поскольку с увеличением скорости самолета требуемая тяга растет пропорционально квадрату, а мощность — кубу скорости, то и масса поршневого двигателя растет пропорционально кубу скорости. Таким образом, для самолета, летящего со скоростью 1000 км/ч. потребовался бы ДВС, масса которого равнялась бы общей полетной массе самолета, не оставляя ничего на конструкцию, запас горючего и полезную нагрузку. Масса же турбореактивного или реактивного ПК оказывается примерно пропорциональной их тяге. Поэтому такие ПК для той же скорости 1000 км/ч обладают вполне приемлемой массой — около 10% массы самолета (без учета топлива) и около 35% с топливом.
Столь продуктивная в авиации техническая идея «заразила» и судостроителей, которые ведут серьезные исследования по созданию прямоточного гидрореактивного ПК.
В зависимости от способа подачи энергии в зону взаимодействия с потоком, обтекающим корпус судна, различают тепловой, газоводометный и магнитогидродинамический (МГД) прямоточные гидрореактивные ПК.
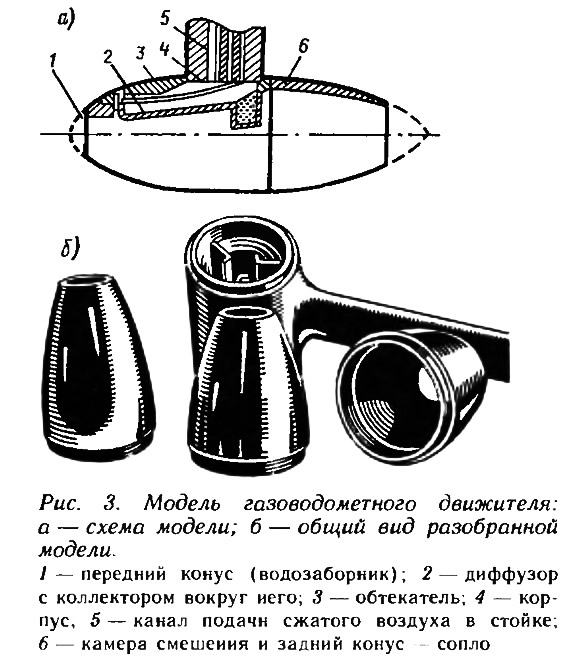
Из этих типов наибольшую эффективность пока удалось получить для газоводометного ПК, с описания которого мы и начнем. С принципами работы такого ПК познакомимся на примере модели, описанной в книге В. А. Башкатова и др.2 Модель движителя имела длину 0,223 м и диаметр 0.078 м (рис. 3). Она состояла из водозаборника. камеры смешения и сопла. Сжатый до избыточного давления 0,34 кг см2 воздух из компрессора, установленного вне движителя, через ресивер поступал в коллектор, выполненный в виде кольцевого канала между диффузором и обтекателем, откуда через 550 отверстий диаметром 0,8. мм подавался в камеру смешения, расположенную сразу за диффузором. Поток воды, поступая в расширяющийся диффузор, замедляет свое движение, вследствие чего повышается статическое давление в нем. В камере смешения, имеющей постоянное поперечное сечение, сжатый до этого давления воздух смешивается с водой и образовавшаяся водовоздушная смесь выбрасывается через сопло. Если сечения на входе (водозаборника) и выходе (сопла) имеют одинаковую площадь, то из-за меньшей плотности водовоздушной смеси по сравнению с плотностью воды, скорость струи, истекающей из сопла, оказывается больше, чем на входе.
Описываемая модель имела диаметр сопла 0.034 м и развивала на расчетном режиме тягу около 0,2 кг, имея на этом режиме к. п. д., равный 0,35. Более полные исследования показали, что к. п. д. прямоточных гидрореактивных ПК подобного типа не превышает 0,4, а их тяга на швартовах (при отсутствии хода) равна нулю и судну для разгона необходим еще и другой движитель. Например, были предложены двухступенчатые водометно-газоводометные движители, состоящие из размещенных в одном канапе осевого насоса и камеры смешения. Однако такие движители по эффективности оказались хуже водомета и не сулят каких-либо эксплуатационных преимуществ.
В 1971 г. директор Голландского опытового бассейна Ван Манен опубликовал анализ целесообразности применения газоводометного ПК для судна на подводных крыльях, имеющего скорость от 40 до 80 уз и водоизмещение от 20 до 180 т. Проектные проработки были доведены до сравнения экономических показателей СПК, оборудованных соответственно газоводометным ПК и ПК с суперкавитирующим гребным винтом. Удельные приведенные затраты3 при скорости 60 уз у газоводометного варианта оказались больше примерно в 1,5 раза.
До сих пор остаются неприемлемыми на судах по своим экономическим показателям воздушные турбореактивные пропульсивные комплексы, хотя за последние 34 года они не раз применялись на глиссерах для заездов на побитие абсолютного рекорда скорости на воде. Именно турбореактивный ПК, установленный на «Синей птице III» Дональда Кэмпбелла, позволил поднять рекорд сразу на 120 км ч, а затем и до нынешних 511,11 км/ч, которые развил в 1978 г. австралиец Кен Ворби на глиссере «Спирит оф Австралия». Но к. п. д. турбореактивного ПК на обычных, не рекордных скоростях, пока еще остается довольно низким.
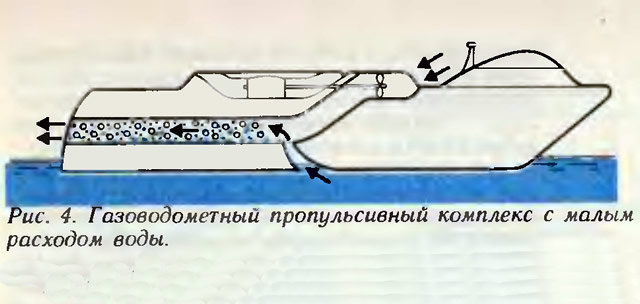
Правда, определенные перспективы открывает идея подачи распыленной воды в сопло воздушно-реактивного ПК. Как показали проведенные в 1973 г. модельные эксперименты, этот прием позволяет повысить тягу на 50—80% без изменения расхода топлива и режима работы самого ПК. Американский специалист Куандт теоретически рассчитал, что при скорости 100 узлов (185 км/ч) подобный ПК может достичь довольно высокого пролульсивного коэффициента, равного 0,48. При этом масса впрыскиваемой воды должна составлять около 10 % от массы используемого воздуха, движение которого можно обеспечивать не только при помощи авиационного турбореактивного ПК, но и при помощи воздушного вентиляторного ПК. В отечественной литературе последний из указанных тип ПК получил название газоводометного движителя с малым расходом воды (рис. 4).
Информация об изображении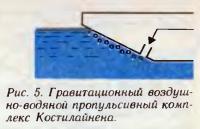
Рис. 5. Гравитационный воздушно-водяной пропульсивный комплекс Костилайнена
Оригинальной разновидностью газоводомета является двухфазный воздушно-водяной ПК, основанный на использовании гравитационных эффектов. Основательное экспериментальное исследование такого ПК в 1968 г. провел финский исследователь Костилайнен. Принцип действия и конструкция устройства предельно просты (рис. 5). Компрессор подает через ресивер воздух к отверстиям, расположенным в нижней части плоской наклонной кормовой оконечности судна. Воздух в виде пузырьков всплывает под действием архимедовой силы и. скользя по наклонной плоскости кормы и увлекая вместе с собой массы оды вверх и назад, создает таким образом тягу. Испытания модели длиной 1.6 м, шириной 0,5 м и осадкой 0,19 м в опытовом бассейне показали, что пропульсивный коэффициент для такого ПК может достигать значения 0,35 без учета потерь в компрессоре и воздуховодах. Тяга ПК достигала 2 кг, а скорость хода модели — 0,85 м с. Воздух при этом подавался через 7 отверстий диаметром 10 мм. Подача воздуха через 49 отверстий диаметром 5 мм приводила к некоторому уменьшению скорости хода, но к повышению пропульсивного коэффициента. Однако изобретателю было ясно, что эффективность ПК явно недостаточна для его использования на судах. Поэтому Костилайнен сделал попытку применить свой движитель на судне с вентилируемым днищем (подробнее о нем см. в «КиЯ» №129). Исследователь рассчитывал, что движитель окажется более эффективным, чем гребной винт при его работе за воздушной каверной. На испытаниях трехметровой модели удалось получить максимальное значение пропульсивного коэффициента 0,55. Для транспортных судов такая эффективность явно низка, однако простота и экологическая чистота воздушно-водяного ПК могут оказаться полезными для создания спортивных и исследовательских самоходных плавсредств.
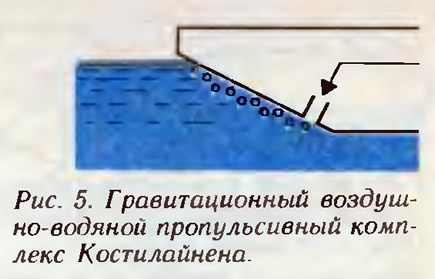
Рис. 5. Гравитационный воздушно-водяной пропульсивный комплекс Костилайнена
В 1974 г. французские исследователи P.-Ж. Балкю и М. Курубль провели испытания баржи водоизмещением 600 т, оборудованной аналогичным описанному выше двухфазным ПК. Для более интенсивного перемешивания воздуха с водой они предложили установить на днище смеситель в виде крыльевой наделки с прорезями. Во время испытаний скорость баржи составила 14 уз, а наивысшее значение пропульсивного коэффициента — 0,4, т. е. введенные новшества на эффективность практически не повлияли.
Очевидно, что давление в камере смешения прямоточного гидрореактивного движителя должно быть больше статического давления на глубине расположения сопла и меньше суммы этого статического давления и скоростного напора. Но были попытки создания движителей с более высокими давлениями в камере смешения и клапанной системой, регулирующей величину давления на подходе рабочей жидкости к впускному окну. Истечение из сопла в таком движителе становится пульсирующим. В 1955 г. Л. А. Юткин предложил электрогидравлический пульсирующий движитель, в котором для создания повышенного давления в камере смешения используется энергия высоковольтного электрического разряда в воде, а вход и выход снабжены клапанной системой. Но до практического применения на судах, несмотря на большой интерес к этому типу движителей многих изобретателей, дело не дошло — эффектность газоводометных ПК пока слишком низка.
Среди предлагаемых прямоточных гидрореактивных ПК есть и такие, в которых тепловая энергия преобразуется в тягу непосредственно в камере смешения — аналогично работе авиационных реактивных ПК, где в камеру смешения и сгорания подается топливо. Роль топлива, выделяющего тепловую энергию i воде, может играть гидрореагирующее горючее — литий, натрий, калий, алюминий, магний. (Например, при реакции 1 кг лития с забортной водой выделяется 28 300 кДж тепла, что в 10 раз больше. чем при сгорании 1 кг керосина в воздухе). Такое гидрореагирующее топливо представляет собой твердое тело, поэтому проблемами становятся непрерывная подача его в камеру смешения и сгорания, обе печение полного сгорания. Гидрореагирующее горючее трудно хранить, т. к. оно легко соединяется с кислородом и влагой воздуха, выделяя взрывоопасный водород. Частично эти проблемы решаются, если для сгорания топлива использовать не забортную воду, а специальный окислитель. Такие ПК получили название ракетных.
Наиболее перспективным из различных видов прямоточных гидрореактивных ПК, по общему признанию, является магнитогидродинамический комплекс (МГД ПК). Сравнительно недавно, благодаря усиленной рекламе японских специалистов, он стал предметом ряда «сенсационных» сообщений (см., например, «Известия» за 12 марта и 4 апреля 1988 г.). Что же представляет собой этот ПК?
Информация об изображении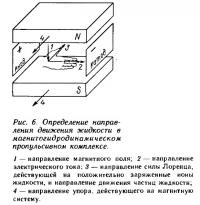
Рис. 6. Направление движения жидкости в магнитогидродинамическом пропульсивном комплексе
Идея МГД ПК появилась в 1961 г.4 одновременно с идеей МГД-генератора, способного преобразовывать тепловую энергию в электрическую без двигателей внутреннего сгорания или паротурбинных установок. Необходимая эффективность подобных устройств достигается только при использовании эффекта сверхпроводимости.

Рис. 6. Направление движения жидкости в магнитогидродинамическом пропульсивном комплексе
Принцип действия так называемого кондукционного МГД-движителя заключается в следующем. Пусть имеется канал прямоугольного сечения (рис. 6), по которому может протекать электролит, скажем, соленая морская вода.
Верхняя и нижняя стенки канала являются соответственно разноименными магнитными полюсами, а боковые стенки, изолированные от остальных, находятся в контакте с электролитом и подключены к источнику постоянного тока. Между боковыми стенками потечет постоянный ток, т. е. начнется направленное движение ионов. На положительно заряженный ион, который движется от анода к катоду и находится в вертикальном магнитном поле, будет действовать так называемая сила Лоренца. Ее направление можно найти по правилу левой руки: если четыре пальца левой руки направить в сторону движения положительных ионов, а ладонь расположить перпендикулярно направлению от северного магнитного полюса к южному (внутренняя сторона ладони при этом смотрит на северный полюс магнита), то большой палец укажет направление силы Лоренца. Под действием этой силы положительные ионы будут отклоняться, взаимодействуя при этом с атомами и молекулами электролита, и вся жидкость начнет перемещаться в указанном направлении. На магниты, создающие магнитное попе, будут действовать силы, противоположные по направлению силе Лоренца, в результате чего возникнет необходимый для движения судна упор. В отличие от всех других типов движителей, здесь упор создается за счет действия на жидкость объемных, а не поверхностных сил, что позволяет ускорить ее поток без изменения давления.
Однако чтобы сила Лоренца имела достаточно высокое значение, необходимо иметь весьма большую напряженность магнитного поля и, соответственно, магнитную индукцию. Чтобы представить, каковы порядки этих величин, укажем, что попе соленоида, имеющего 1 миллион ампер-витков на метр, создает в пустоте магнитную индукцию, равную 1,26 тесла (Тл). А для того чтобы получить высокую эффективность МГД-движителя, необходима индукция 7—10 Тл; при этом потери энергии (в основном на нагрев воды) составят около 20%.
Реальная конструкция, разработанная японскими специалистами, должна развивать тягу на швартовном режиме до 2500 т. Испытания двух моделей судов (SEMD-1 и ST-500) с МГД-движителями прошли успешно, и было решено приступить к проектированию МГД-движителей для пяти различных судов водоизмещением от 30 до 10 000 т.
Реальность создания МГД ПК зависит прежде всего от решения трех проблем: разработки больших сверхпроводящих магнитных систем, способных создавать мощное магнитное поле; экранирования внешних магнитных попей; обеспечения эффективной работы электродов при неизбежном в процессе их работы электролизе, т. е. выделении газов.
Последние сообщения свидетельствуют о том, что Японская ассоциация содействия судостроению утвердила проект создания модели судна водоизмещением 150 т, оборудованной МГД ПК. Расчетная скорость модели составляет 8 уз, упор — 800 кг. Специалисты надеются. что это будет первый шаг по созданию «бесшумного и сверхскоростного судна XXI века со скоростью 100 узлов». В некоторых сообщениях эта японская программа названа «Революцией в судостроении».
Однако, если оставить в стороне рекламную шумиху, то можно заметить, что проработки и даже испытания моделей, оборудованных МГД ПК, правда без использования сверхпроводимости, ведутся уже давно. Например в 1966 г. на механическом факультете Калифорнийского университета испытывалась трехметровая модель подводной лодки EMS-1 водоизмещением 408 кг с МГД ПК (рис. 7). Для создания магнитного поля по обмотке магнитной системы пропускался ток силой 110—120 А. Корпус и магнитная система имели непроводящую облицовку, поверх которой были установлены два электрода (анод и катод), соприкасающиеся с морской водой. На электроды подавалось постоянное напряжение 27,8 В, при этом между электродами возникал ток 91,4 А. Электропитание обеспечивалось свинцово-щелочными аккумуляторными батареями, емкости которых хватало для работы ПК в течение 20 минут.
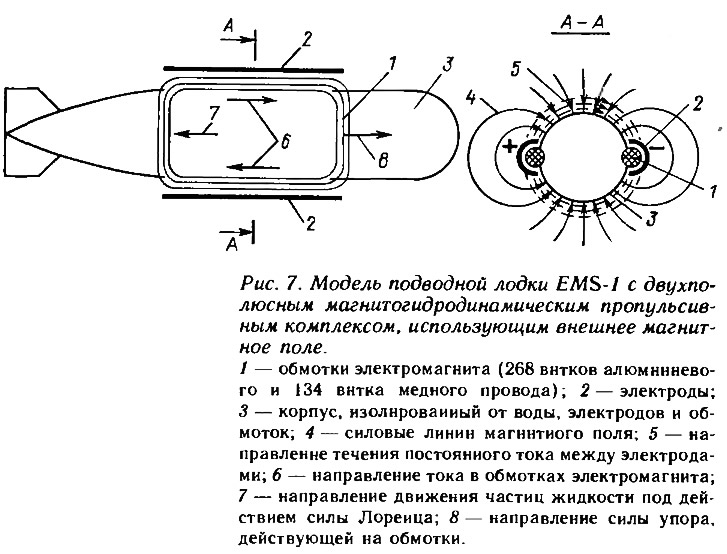
Модель развивала скорость 0,5 м/с [1,8 км/ч), а МГД ПК развивал при этом тягу около 0,1 кг. Полный пропульсивный коэффициент был ничтожно мал (0,01%). По расчетам калифорнийских ученых повысить эффективность ПК можно будет только при сверхпроводящей магнитной системе. Тогда для движения подводной лодки водоизмещением 28 т со скоростью 5 м/с (18 км/ч) в сверхпроводящих обмотках магнитной системы должен протекать ток силой 3 млн. ампер (!).
Заканчивая эту часть обзора, упомянем еще о двух курьезных видах пропульсивных комплексов. Об одном из них состоялся серьезный научный доклад профессора Белла из Генуи на VII симпозиуме по корабельной гидродинамике 1969 г. Автором были проведены испытания 4-метровой модели судна, которая приводилась в движение инерционным пропульсивным комплексом. Основу комплекса составили две подвижные массы по 4,9 кг (13% водоизмещения), расположенные в корпусе. Скорость поступательного движения модели составила всего 0,36 м/с (1,3 км/ч), причем при работе ПК возникала сильная вибрация и вся сила тяги была приложена к оси, вокруг которой вращались массы. Аналогичный ПК предлагал и советский изобретатель В. Н. Толчин (см. его книгу «Инерцоид», 1977 г.).
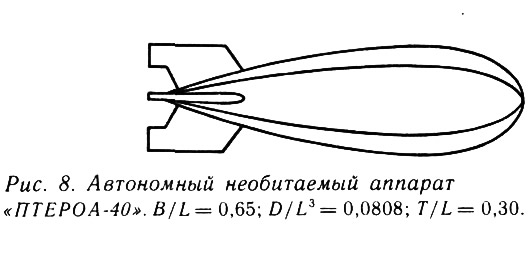
В 1987 г. появилось сообщение японских специалистов о создании модели автономного подводного необитаемого аппарата «ПТЕРОА-40» длиной 1,5 м (см. рис. 8), который развил скорость около 7 уз. Никакого движителя на этом аппарате нет, он является по сути подводным планером, получающим горизонтальное перемещение при погружении под действием отрицательной силы плавучести, составляющей 5% водоизмещения; аппарат снабжен развитыми несущими поверхностями и системой регулирования плавучести и дифферента.
Итак, как можно заключить из этого обзора, достаточно эффективный нетрадиционный пропульсивный комплекс без подвижных относительно корпуса частей пока еще не создан. Но работы продолжаются, причем шансы на успех не так уж малы, если учесть развитие всех областей современной техники.
Копируя природу
В предыдущей статье мы рассмотрели нетрадиционные пропульсивные комплексы (ПК) без подвижных относительно корпуса элементов и выяснили, что в качестве судовых они пока неконкурентоспособны по сравнению с традиционными ПК, содержащими гребной винт. Однако, как уже отмечалось, гребной винт, кроме сравнительно невысокой эффективности, имеет и другие недостатки. Он является, например, источником вибрации и шума, которые приводят к появлению усталостных трещин на обшивке в кормовой оконечности и отрицательно сказываются на обитаемости судна.
Часто причиной повышенной виброактивности судового винта является нестационарная кавитация, возникающая на его лопастях, но даже при полном отсутствии кавитации гребной винт все равно нередко является главной причиной шума и вибрации. Для воздушных винтов имеются в этом смысле свои особенности, но нет более наглядного примера, иллюстрирующего процесс и последствия шумообразования, чем шум винтов вертолета: он имеет настолько высокий уровень, что это существенно ограничивает практическое использование этих транспортных средств.
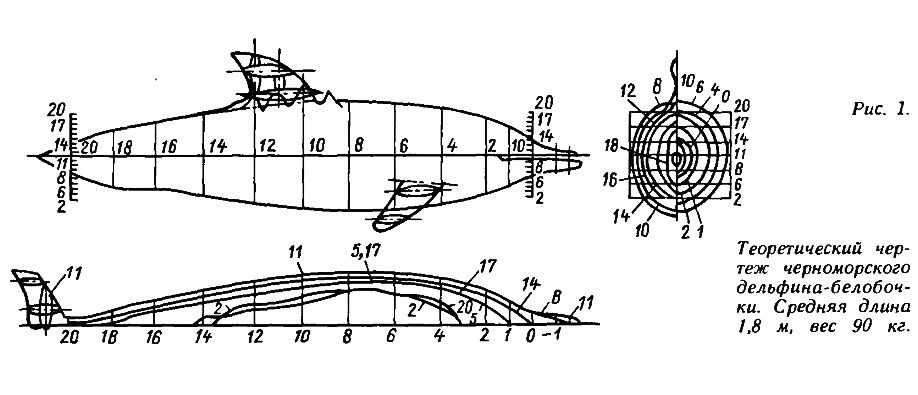
Именно поэтому наряду с совершенствованием винтовых движителей ученые большое внимание уделяют разработке нетрадиционных пропульсивных комплексов, от которых при достаточно высокой эффективности требуется существенно меньший уровень шумообразования и виброактивности по сравнению с винтом. Внимание исследователей, работающих в этом направлении, прежде всего привлекают пропульсивные комплексы водных животных: плавниковый (характерный для морских млекопитающих отряда китообразных), волновой (характерный для морских рыб отряда угреобразных, кефали, ставриды, форели, а также плавающих змей и рыбообразных животных класса круглоротых), пульсирующий гидрореактивный (характерный для осьминогов) и водометный жаберный, используемый рыбами, как вспомогательный. Кроме перечисленных, как показано на рис. 1 предыдущей статьи, к рассматриваемому типу нетрадиционных относится ПК с движителями типа «машущее крыло», весельный, а также колесный ПК с подвижными плицами.
Значение и масштабы исследований по изучению гидродинамики водных животных достигли такого уровня, что в науке появился специальный раздел под названием «Гидробионика» или «Биологическая гидродинамика».
Пожалуй, наибольший интерес ученых-гидробиоников вызывает пропульсивный комплекс дельфина, что связано с так называемым парадоксом Грея, сформулированным им еще в 1936 году (см. «КиЯ» №85). Наблюдая животных в открытом море, английский зоолог пришел к выводу, что скорость плавания дельфинов выше, нежели может позволить мощность, которой они обладают. С тех пор в биологических атласах утверждается, что дельфин (отряд китообразных, семейство настоящих дельфинов, род обыкновенных дельфинов) плавает настолько быстро, что легко обгоняет корабли, идущие со скоростью около 20 узлов. При этом группы дельфинов иногда в течение нескольких часов сопровождают корабль. Именно на подобных наблюдениях и сделал свой вывод Грэй. Однако к настоящему времени накоплено достаточно данных для объяснения этого парадокса или, точнее, для доказательства того, что никакого чуда, к сожалению, в гидродинамике дельфина нет.
С этим никак не хотят согласиться некоторые профессиональные гидробионики. Например, в недавно вышедшей книге С. В. Першина «Основы гидробионики»5 утверждается: «коэффициент гидродинамического сопротивления дельфина значительно ниже, чем у жесткой модели, тем самым расчетно-экспериментальным путем подтверждается существование известного парадокса Грея о плавании дельфинов с малым гидродинамическим сопротивлением».
В то же время в обзоре, сделанном профессиональными гидродинамиками Ж. Я. Грушанской и А. И. Короткиным, приведены достаточные фактические данные для утверждения, что коэффициенты сопротивления живого дельфина и его жесткой модели практически равны и «можно сделать вывод об отсутствии в настоящее время каких-либо оснований, подтверждающих достоверность парадокса Грея». К подобному выводу приходит и известный американский гидродинамик By.
Аналогичные расхождения между гндробиониками и гидродинамиками возникают и при оценке эффективности плавникового движителя.
Не останавливаясь на дальнейшем рассмотрении имеющихся в гидродинамике дельфина противоречий и недоразумений, попробуем, ориентируясь на наиболее надежные, по нашему мнению, данные Ж. Я. Грушанской и А. И. Короткина, оценить величину пропульсивного коэффициента плавникового ПК этого животного. По указанным данным, величина пропульсивного коэффициента для дельфина длиной 1,8 м и массой 90 кг, теоретический чертеж которого приведен на рис. 1, находится в пределах 0,26—0,40. Это вполне соответствует мощности, вырабатываемой связанными с плавником мышцами дельфина.
Справедливость этих выводов подтверждается испытаниями радиоуправляемой модели дельфина длиной 1,6 м с электродвигателем мощностью 90 Вт, проведенными в Ленинградском институте инженеров водного транспорта Б. Сахновским (см. «Рационализатор и изобретатель» № 11, 1974). Конструкция модели позволяла изменять амплитуду и частоту колебаний хвостового плавника. Максимальное значение пропульсивного коэффициента, достигнутое в процессе этих испытаний, составило 0,37.
Пропульсивный комплекс дельфина, безусловно, обладает высокой эффективностью, но только, если оценивать его эффективность по совершенно другим критериям, которые связаны с развитием этого вида животных. Например, очевидно следующее: так как дельфину необходимо дышать атмосферным воздухом, его ПК должен обеспечивать высокие маневренные качества, позволяющие находиться вблизи свободной поверхности воды даже в штормовом море. Этим, видимо, и объясняется горизонтальное расположение плавника у дельфина, в отличие от вертикального, характерного для быстроходных рыб. К сожалению, профессиональные гидробионики оценивают эффективность ПК дельфина по тем же критериям, что и судостроители, уделяя мало внимания выявлению специфики данного вида животных.
Несмотря на невысокое значение пропульсивного коэффициента ПК с плавниковым движителем, он нашел довольно широкое применение в виде ласт и моноласт для подводных пловцов.
В 1974 г. американские ученые Пикеи и Кроу описали эксперименты в опытовом бассейне, в процессе которых определялся коэффициент полезного действия различных вариантов ласт, установленных на буксировочной тележке и приводимых в движение специальным механизмом — имитатором работы ног подводного пловца. Ученые, в частности, установили, что величина КПД ласт не превышает 35%, уменьшается с ростом поступательной скорости и увеличивается с повышением темпа колебаний. К аналогичным оценкам приводит и анализ данных о подводных пловцах-спортсменах, которые в рекордных заплывах с моноластом на дистанции 50 м достигают средней скорости 3,125 м/с.
Интересно заметить, что переход от ласт к «аквапеду» с педальным приводом на гребной винт позволяет увеличить скорость подводного пловца примерно в 1,5 раза. Это свидетельствует о том, что пропульснвный коэффициент «аквапеда» примерно в 3,5 раза выше, по сравнению с его величиной для ПК с ластами, которая, по этой оценке, составляет не более 25%. Несмотря на свою низкую эффективность, ласты получили широкое распространение ввиду удобства использования, повышенной безопасности и отсутствия механических передач.
Идея применения ПК с ластами для движения судна возникла еще в 1848 г. у английского изобретателя Робер а Фоулеса, который назвал свой движитель «рыбий хвост». В 1956 г. А. Д. Гофман опубликовал обстоятельный анализ возможности применения ПК с ластами на судах речного флота и показал, что при ограниченной осадке, когда площадь, ометаемая лопастями гребного винта, существенно ограничена, применение подобного ПК может оказаться целесообразным. Однако, если не считать подводного плавания и судомоделизма, ПК с плавниковым движителем из-за низкой эффективности практического применения не получили.
Невысокая, по сравнению с гребным винтом, эффективность плавникового движителя объясняется прежде всего нестационарностью его действия, что приводит к значительным дополнительным потерям, по сравнению с непрерывно действующими движителями, такими, как, например, гребной винт. Сложная форма движений хвостового плавника дельфина, который как бы описывает восьмерку, не является достоинством этого вида движителя а объясняется отсутствием в живой природе возможности создать вращательное, как у гребного винта, движение и стремлением приблизиться к этому движению как можно ближе.
В последние годы особенно большое внимание привлекает движитель типа «машущее крыло», являющийся , по принципу действия очень близким к рассмотренному выше плавниковому движителю. Главные отличия «машущего крыла» заключаются в том, что оно, как правило, кроме тяги может создавать еще и подъемную силу, а также в наличии совершающей поперечные колебания передней кромки. Возможна ли существенно более высокая эффективность «машущего крыла», по сравнению с плавниковым движителем, и если да, то за счет чего? Согласно расчетным оценкам, выполненным ЛКИ на базе линейной математической модели, на этот вопрос можно дать положительный ответ.
Если рассмотреть для примера машущий движитель в виде плоского крыла площадью 4 м2, размером 1X4 м, движущийся поступательно со скоростью 10 м/с, то, согласно этим оценкам, получим, что крыло при 167 вертикальных колебаниях в минуту с амплитудой 0,127 м создает тягу 0,836 т при КПД 0,61, для чего требуется мощность 134 кВт. Если для создания этой же тяги использовать гребной винт при частоте вращения, равной частоте колебаний крыла, то диаметр этого гребного винта будет равен 0,85 м, а площадь лопастей при дисковом отношении, равном 1, составит 0,567 м2, т. е. в 7 раз меньше, чем у рассмотренного крыла. Если учесть еще и большой вес колеблющегося крыла, а также вибрацию, которую оно вызовет, то гребной винт, КПД которого будет заметно выше, имеет явное преимущество. Однако разрыв по эффективности уже не так разителен, как в случае плавникового движителя, что подтверждается результатами модельных и натурных испытаний.
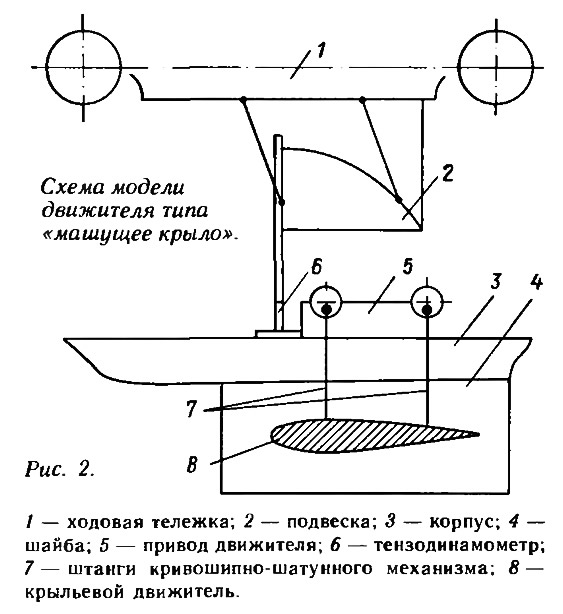
Серия экспериментов с моделью движителя типа «машущее крыло», схема которой изображена на рис. 2, проведенная в 1979—1980 гг. в Новосибирском институте инженеров водного транспорта, показала перспективность дальнейших исследований в этой области с целью создания движителей для судов с ограниченной осадкой. В 1982 г. японские исследователи опубликовали результаты обширных теоретических, модельных и натурных исследований по созданию движителей рассматриваемого типа (они называют их судовыми пластинчатыми движителями типа «плавник дельфина»). Было установлено, что для движителя в виде вертикально колеблющейся горизонтальной пластины, установленной под днищем судна, пропульсивный коэффициент может достигнуть 65%, что делает применение такого движителя целесообразным на заднем ходу, особенно при выполнении рыболовных операций с сетями, и на мелководье. В качестве недостатков указывается низкое значение оптимальной частоты колебаний и плохая мореходность при бортовой качке.
Чем же объясняется сравнительно высокая эффективность машущего крыла, по сравнению с плавниковым движителем? Прежде всего, наличием подсасывающей силы, которая у плавникового движителя или совсем не реализуется, или реализуется лишь частично. Правда, в упомянутой выше теории машущего крыла предполагалось, что подсасывающая сила реализуется полностью. Однако в действительности это возможно только при специальных плавных образованиях входящей кромки крыла и отсутствии отрыва пограничного слоя или кавитации в районе выходящей кромки в процессе колебания крыла.

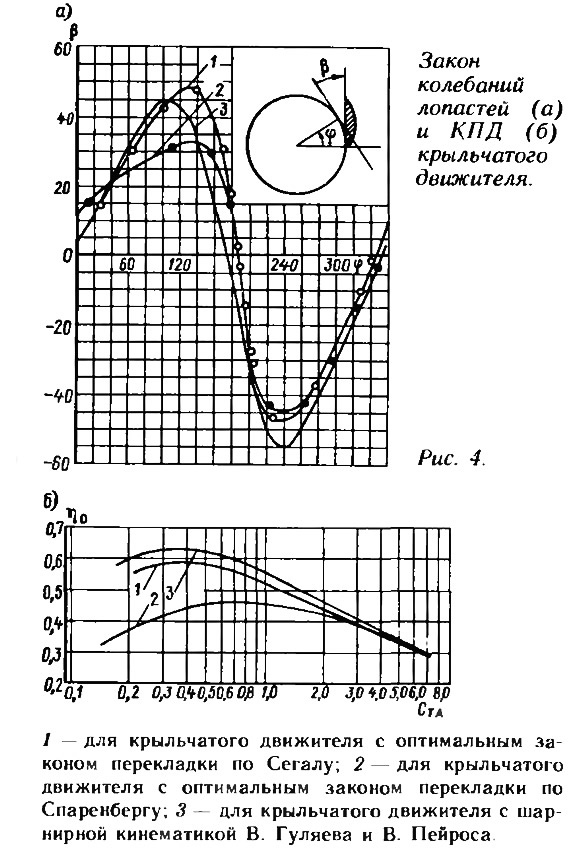
Вообще влияние закона движения машущего крыла на его эффективность очень велико. Наиболее полно такое влияние изучено экспериментально для системы движущихся по довольно сложному закону крыльев, входящих в состав крыльчатого движителя (КД), который является единственной разновидностью движителей типа «машущего крыла», получившей широкое распространение в судостроении. Устройство КД показано на рис. 3, а принцип его действия состоит в том, что каждая лопасть, имеющая вид длинного вертикального крыла, совершает круговое движение вместе с ротором, на котором они установлены, и колебательные движения вокруг собственных вертикальных осей.
На рис. 4,а и 4,б показаны опубликованные в книге «Крыльчатые движители»6 экспериментальные значения КПД шестилопастных КД для трех различных законов колебаний лопастей. Из этих графиков видно, что максимальное значение КПД которое достигается для закона колебаний, реализуемого при помощи механизма с кинематикой, предложенной В. Гуляевым и В. Пейросом, равно 0,63, что практически совпадает с приведенной выше теоретической оценкой для машущего крыла при его малых колебаниях. Поиск оптимальных законов колебаний для движителей типа «машущее крыло» является важнейшей задачей, без решения которой нельзя получить приемлемую эффективность.
В отличие от линейной теории, предполагающей колебания крыла малыми, для описания работы КД создана вихревая теория, учитывающая конечность амплитуд колебаний. Крыльчатый движитель, идея создания которого была выдвинута еще в 1681 г. Робертом Гуком, является единственным в настоящее время широко применяющимся движителем типа «машущее крыло». Фактически первый КД был изготовлен фирмой «Боинг» в 1925 г. по проекту, предложенному еще в 1921 г. американским профессором Ф. Кирстеном для небольших катеров. В 1928 г. был изготовлен КД австрийской фирмой «Фойт». Конструкция этого движителя была затем значительно усовершенствована Шнейдером за счет новой кинематики управления крыльями. К настоящему времени во всем мире изготовлено и установлено на буксиры, тральщики, буровые суда, плавкраны и паромы более 2000 крыльчатых движителей.
Начиная с 1951 г., отечественная промышленность освоила выпуск КД трех типоразмеров: 1,6, 2,0 и 2,6 м по осям лопастей, с максимальной потребляемой мощностью от 150 до 2000 л. с. Так, отечественный шестилопастной крыльчатый движитель ДКК 26/6 массой 17 т при частоте вращения 100 об/мин потребляет мощность 1500 л. с., имеет диаметр 2,6 м, длину полуэллиптических в плане крыльев — лопастей 1,6 м (при ширине по хорде 0,4 м) и способен развивать упор до 11 500 кгс. Масса каждого из шести колеблющихся крыльев этого движителя равна 208 кг. Применение КД становится экономически целесообразным, когда нужно обеспечить судну высокую маневренность.
Главное преимущество КД перед гребным винтом — это возможность плавного изменения направления вектора упора на 360°. Здесь следует заметить, что гораздо более высокая, чем у традиционного ПК, маневренность характерна и для движителей всех водных животных. Действительно, маневренные качества китообразных, от 150-тонного 33-метрового синего кита до легко исполняющего виртуозные трюки дельфина, имеющего вес в 1500 раз меньший при длине всего около 2 м, техническим объектам пока недоступны. Интересно отметить, что поскольку КПД движителя типа «машущего крыла» (при условии реализации подсасывающей силы на передней кромке) на 20—30% выше, чем КПД плавникового движителя, то включение в конструкцию ласты крыльевого элемента приводит к существенному увеличению ее КПД.
Кроме пассивной, вызванной внешними силами деформации плавника или даже всего тела морского животного, огромное значение в процессе их движения и обеспечения маневренных качеств имеют волновые, вызванные работой мышц активные движения. Если у животного, например, дельфина, есть развитый хвостовой плавник, то такие волновые движения тела не играют решающей роли в создании тяги, но если животное лишено плавников (угорь, минога и т. п.), то активные волновые движения тела становятся основным и единственным способом создания тяги. В этом случае можно говорить о волновом пропульсивном комплексе.
Академик М. А. Лаврентьев описал его следующим образом: «Пусть имеется жесткий канал с круговыми сечениями постоянного радиуса и с осевой линией, которая представляет собой плоскую волнистую кривую — например, синусоиду. Представим себе, что в этот канал посажен уж, круговые сечения которого совпадают с сечениями канала, и допустим, что трения между телом ужа и стенками канала нет. Сможет ли в этих условиях уж прийти в движение из состояния покоя и достичь значительной скорости, если длина канала достаточно велика? Оказывается, сможет, если будет мускульными усилиями напрягать различные участки своего тела таким образом, чтобы выпрямлять тело или делать его более изогнутым». На рис. 5 приведена схема описанного движения. Стрелками показано направление сил давлений, действующих на тело ужа со стороны канала при его движении слева направо.
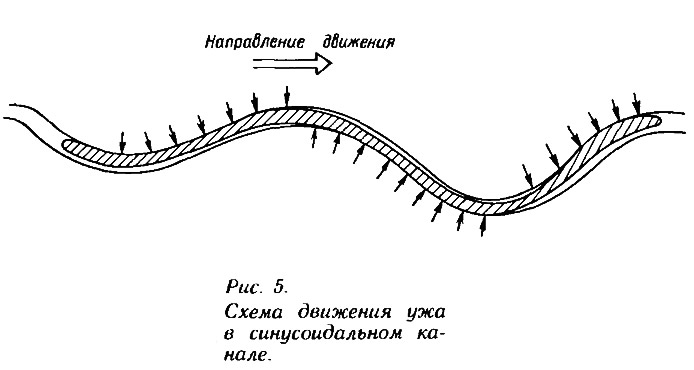
«Например, чтобы двигаться слева направо, — продолжает М. А. Лаврентьев, — уж должен делать такие усилия: если вправо от некоторого участка его тела кривизна канала убывает, то уж должен выпрямлять этот участок, если же кривизна канала возрастает, то уж должен направлять усилия на увеличение кривизны этого участка. Короче говоря, уж должен создавать распределение кривизны своего тела, которое соответствует его новому, подвинутому в желаемом направлении положению в канале. Но откуда же взять ужу в реальных условиях канал? Ответ на этот вопрос также прост: канал в воде он создает передней частью своего тела, вблизи головы, а средней и задней частями совершает изгибные движения, которые и порождают тяговую силу. При этом используется инерционность воды, в силу которой в окрестностях головы ужа примыкающие слои воды действуют на остальную часть тела как стенки канала...»
Нужно сказать, что коэффициент полезного действия при этом оказывается тем выше, чем больше отношение присоединенной массы воды к собственной массе тела и может достигать для круглого тела значения 0,41, без учета потерь на вязкость жидкости. Из имеющейся в настоящее время теории следует, что скорость движения волны формы тела должна быть больше скорости поступательного движения ужа, т. е. частота колебаний n в герцах должна быть больше величины V/λ, где V — скорость поступательного движения, λ — длина волны формы тела.
Согласно приближенной оценке академика АН УССР Г. В. Логвиновича, величина КПД волнового движителя с постоянной по длине тела амплитудой колебаний без учета потерь, вызванных вязкостью жидкости, может быть найдена по очень простой формуле η=0,5(1+V/с), где с — скорость движения волны формы тела, равная произведению частоты колебаний на длину этой волны, т. е. с=λ·n.
Из этой формулы следует. Что, когда скорость поступательного движения много меньше скорости волны формы тела, идеальный КПД такого движителя близок к 0,5. Если скорость волны формы тела приближается к скорости поступательного движения, то КПД возрастает, однако при этом уменьшается значение тяги движителя. Волновой движитель, в отличие от изолированного гребного винта, может создавать тягу даже в идеальной, т. е. невязкой жидкости, поскольку действует в нестационарном режиме, используя не зависящие от вязкости инерционные силы, возникающие при его работе. Работа же гребного винта при его стационарном движении связана с обусловленным вязкостью механизмом образования циркуляции и подъемной силы на его лопастях. Поэтому в жидкости, лишенной вязкости, на лопастях гребного винта, как и на крыле самолета подъемная сила не должна возникать, хотя такая ситуация, конечно, возможна только теоретически. Все реальные жидкости при нормальных условиях обладают вязкостью и поэтому значение КПД волнового движителя оказывается значительно меньше указанной выше оценки и, по данным Ж. Грушанской и А. Короткина, находится в пределах 0,1—0,2.
Идея технического осуществления пропульсивного комплекса с использованием волнового движителя принадлежит известному советскому художнику и изобретателю П. В. Митуричу, который получил авторское свидетельство под № 33418 от 8 января 1930 г. на судовой пропульсивный комплекс, включающий двигатель, систему шатунов и стержней, сообщающих волнообразное движение эластичному корпусу судна. В 70-х годах два американских студента построили и испытали модель подводной лодки без выступающих частей и гребного винта, оборудованную специальной магнитной системой (рис. 6), создающей волнообразное движение эластичного корпуса.
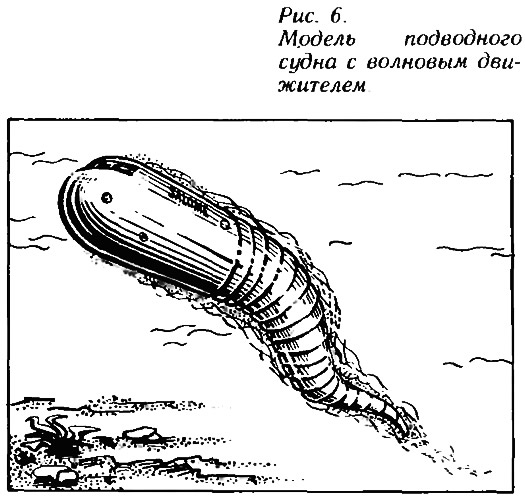
По сообщениям, эта модель достигла скорости около 1 м/с. Аналогичную магнитную систему повышенной надежности в 1983 г. предложил советский изобретатель М. И. Азанов.
Таким образом, в этой и предыдущей статьях мы рассмотрели широкий спектр судовых пропульсивных комплексов — ПК со стационарными подвижными частями, ПК без таковых и ПК с нестационарными подвижными частями, характерными для морских животных. Хотя и нестационарность и наличие подвижных частей являются для судовых движителей явными недостатками, комплексы с колеблющимися подвижными элементами в виде крыльчатых движителей нашли достаточно широкое применение в судостроении. Логично было бы считать, что в судовой технике в дальнейшем могут получить развитие именно такие ПК. Однако анализ опыта развития авиационных пропульсивных комплексов приводит, в некотором смысле, к противоположным выводам. Действительно, в авиации традиционные комплексы с гребным винтом уступили место турбореактивным и реактивным, т. е. произошел сдвиг от традиционных комплексов в сторону комплексов без подвижных частей или с вспомогательными подвижными частями, как у турбореактивных комплексов.
В отличие от судовых комплексов, в авиации не нашли применения комплексы с нестационарными подвижными частями, хотя усилия в этом направлении предпринимались и предпринимаются немалые. Последний яркий пример неразрешимости проблемы машущего полета был дан совсем недавно. Американский конструктор Поль Маккриди, известный созданием самолета с мускульным приводом и в 1979 г. пересекший Ла-Манш, в 1984—1986 гг. попытался построить машущекрылую модель гигантского птерозавра, на что истратил 2 млн. долларов. В качестве прототипа он использовал скелет крылатого ящера с размахом крыльев в 11 м, найденный археологами в 1975 г. в Техасе. Модель в масштабе 1:2 с размахом крыльев 5,5 м хотя и способна планировать, медленно махая крыльями, но взлететь самостоятельно не может, и для ее запуска используется катапульта, что не позволяет считать успешной данную попытку решения проблемы машущего полета.
Цитируя немецких ученых Д. Кюхемана и И. Вебера, можно утверждать, что в настоящее время «представляется очевидным, что никаких особенных аэродинамических преимуществ из машущего движения извлечь нельзя, поскольку оно является только естественным следствием анатомии летающих существ». Таким образом, не будет ошибкой сказать, что движители типа «машущее крыло» оказались более приспособленными к судовым условиям, где от них не требуется создания одновременно и тяги и подъемной силы.
Тут следует оговориться. Известна одна попытка создания машущего подводного крыла, пригодного для использования на СПК в качестве и крыла и движителя. Еще в 1945 г. советский инженер А. И. Болдырев предложил с этой целью подводное крыло с колеблющимся предкрылком. Проведенные им расчеты и эксперименты показали, что без учета трения, КПД предлагаемого устройства может достигать значения 0,52. Более подробно конструкция А. И. Болдырева описана в «КиЯ» №136. Сделанная изобретателем модель работает, однако, как поведет себя натурное судно с таким движителем, сказать может лишь опыт.
В заключение следует отметить, что пропульсивные комплексы с колеблющимися подвижными элементами используются плавающими животными, как правило, не для равномерного и прямолинейного движения, когда они проигрывают по эффективности традиционным ПК с гребным винтом, а для активного маневрирования. Маневры, которые совершают животные, исключительно разнообразны и связаны с их жизненными функциями. Очень распространенным является, например, маневр разгона с последующим движением по инерции без помощи движителей.
Этот маневр некоторые авторы считают особым способом движения, являющимся наивыгоднейшим для некоторых видов плавающих животных, таких, например, как кальмары, осьминоги и каракатицы, которые после выброса забранной внутрь мантии воды осуществляют максимально возможное сокращение своего поперечного сечения и двигаются некоторое время по инерции. Аналогичный маневр используется для движения птицами отряда воробьиных, которые в период движения по инерции складывают крылья, уменьшая площадь поверхности более чем в два раза, хотя при этом теряется высота полета и траектория становится волнистой.
Вместо уменьшения поверхности и площади поперечного сечения, аналогичный результат достигается летающими рыбками в период движения по инерции за счет выхода в воздух, сопротивление при движении в котором уменьшается примерно в 800 раз, т. е. пропорционально уменьшению плотности. Этот принцип уже используется в технике, в таких ракета-торпедах, как, например, американская система «Асрок», предназначенная для старта с надводных кораблей, и «Саброк» — для старта с подводных лодок. Он привлекает внимание и изобретателей. Например, С. Е. Каринский в 1978 г. предложил устройство для подводного плавания, состоящее из поршня и движителя в виде зонта, раскрывающегося в активной фазе и складывающегося при движении по инерции.
Сделанный обзор пропульсивных комплексов нетрадиционных типов не претендует на полноту, но должен оказаться достаточным для того, чтобы читатель убедился в необходимости тщательной объективной оценки эффективности рассматриваемого типа движителя или пропульсивного комплекса, независимо от очевидной или даже доказанной его работоспособности. Сколько интересных, на первый взгляд, предложений оказались неэффективными и поэтому не нашли применения! Кроме упоминавшихся, это такие «модные» в свое время новшества, как подводное крыло с движителем Коанда или кажущийся парадоксальным движитель с реактивной струей, вытекающей из тела не назад, а вперед по движению, предложенный академиком Л. И. Седовым.
Несколько подробнее о способах оценки эффективности ПК мы поговорим в последней заключительной статье нашего цикла.
Так что же лучше?
В статьях выше были рассмотрены некоторые представители так называемых нетрадиционных пропульсивных комплексов (ПК), такие, например, как магнитогидродинамический, газоводометный, плавниковый, волновой, типа «машущее крыло». В отличие от традиционного ПК, состоящего из двигателя, движителя — в виде гребного винта — и корпуса, нетрадиционные комплексы не имеют в качестве движителя гребного винта. Как читатель мог убедиться, в настоящее время они уступают традиционным по эффективности. А относительно перспектив можно процитировать слова известных советских специалистов В. М. Пашина и В. К. Турбала: «До появления новых дешевых источников энергии альтернативы обычному гребному винту (в том числе и винты в насадках, и водометы с лопастным насосом, и частично погруженные винты) не будет».
Здесь надо иметь в виду, что речь идет лишь о крупных транспортных судах; в других случаях не исключено, что нетрадиционные ПК могут оказаться достаточно эффективными. Именно так обстоит дело, например, с крыльчатым движителем для плавкранов и буксиров или с ластами (моноластой) для подводных пловцов-спортсменов.
Как бы там ни было, проблема оценки эффективности ПК существует и стоит довольно остро. Достаточно вспомнить идею гидролета А. Бакшинова (см. «КиЯ» №104 и №111), которая вызвала ненужный ажиотаж и шумиху, подробно освещенные в «Комсомольской правде» за 15.02.88.
Вообще говоря, дать объективную оценку эффективности нового типа ПК совсем не так просто, как может показаться на первый взгляд. В связи с этим трудно согласиться с мнением писателя Ю. Назарова (см. «Известия» за 14.12.88), который предлагает ввести юридическую ответственность экспертов за свое решение по рассматриваемым изобретениям как рычаг, обеспечивающий безошибочность соответствующих решений.
Дело в том, что даже прямые сравнительные натурные испытания могут не дать требуемой объективной оценки предлагаемого новшества. Такой случай произошел, например, в 1865 г. Тогда в Англии была построена канонерская лодка «Наутилус» с водометным движителем Рутвена и паровой машиной мощностью 560 кВт. Сравнение с аналогичным по размерам и назначению двухвинтовым, видимо, неудачно спроектированным, кораблем показало, что «Наутилус» развил скорость на 0,5 узла выше. Только в 1883 г. в результате других сравнительных испытаний, более строго и тщательно проведенных Торникрофтом на небольших миноносцах водоизмещением 14,6 т с мощностью паровой машины 123 кВт, выяснилось, что винтовой вариант дает скорость 17,3 уз, а водометный — 12,6 уз Дальнейшее развитие водометных движителей показало, что хотя на умеренных скоростях они уступают по эффективности винтовым, однако это различие уменьшается с увеличением скорости, и поэтому на ряде СВП и СПК устанавливаются водометные движители. Например, советское серийное дизельное СПК «Белорусь», водоизмещением 14,5 т выпускается в двух вариантах; с гребным винтом и с водометом, причем последний обеспечивает большую скорость (60 км/ч вместо 55).
Другой подобный случай произошел еще раньше — в 1842—1843 гг, когда в Англии проводились сравнительные испытания «перетягиванием» винтового и колесного пароходов. Сначала перетянул колесный пароход и только через год справедливость восторжествовала: винтовой шлюп «Раттлер», имеющий водоизмещение 800 т и мощность 162 кВт, «перетянул», т. е. развил большую тягу на швартовном режиме, чем колесный пароход «Алекто», имеющий такие же водоизмещение и мощность.
С тех пор судостроители неоднократно прибегали к методу сравнительных натурных испытаний для оценки эффективности ПК различных типов. Достаточно напомнить такой яркий пример, как постройку в США в 1971 г. двух 100-тонных скеговых СВП, одинаковых во всем, кроме движителей: «SES-100В» имел два частично погруженных гребных винта, а «SES-100А»— два водомета с центробежными насосами. Кстати, частично погруженный гребной винт оказался эффективнее, обеспечив рекордную для таких крупных судов скорость 91,9 уз (90,3 уз — по другим данным).
Испытания натурных судов требуют колоссальных затрат и не всегда дают достаточно достоверную информацию. Поэтому, именно для получения объективной информации во всем мире широкое распространение получил модельный эксперимент, проводимый в специально для этого построенных опытовых бассейнах. Первый такой бассейн был построен В. Фрудом в 1872 г. в Англии, а в настоящее время во всем мире их насчитывается более 100. Однако при этом возникают специфические проблемы, связанные с влиянием масштаба модели на результат. Использование слишком малых моделей оказывается вообще неприемлемым и, например, для водоизмещающих судов приходится делать модели длиной более 5 м.
Анализ эффективности современных ПК также, как правило, основан на модельном эксперименте, проводимом в опытовом бассейне или в кавитационной трубе. Но даже при наличии результатов тщательно проведенного модельного эксперимента сравнение различных по конструкции или принципу действия ПК представляет определенные трудности. Во-первых, необходимо указать критерий или критерии, по которым целесообразно проводить сравнение (некоторые из них будут рассмотрены ниже). Во-вторых, если равнозначных критериев несколько, возникает проблема выбора компромисса, что, как правило, исключает получение объективных оценок В-третьих, с одной стороны, имеются достаточно достоверные сведения о значениях чисто технических критериев, но, с другой стороны, для окончательной оценки нужны значения еще и экономических критериев, точность вычисления которых часто оказывается значительно ниже необходимой.
Все указанные трудности приводили, приводят и будут приводить к ошибкам в оценке перспективности тех или иных новшеств.
В качестве примера можно привести поначалу казавшуюся перспективной идею использования суперкавитирующих гребных винтов для прямой передачи мощности (без редукторов) от высокооборотных турбинных установок на быстроходных водоизмещающих судах, выдвинутую в 40-х годах академиком В. Л. Поздюниным. После тщательного изучения оказалось, что такие винты становятся достаточно эффективными лишь при скоростях выше 50 уз.
Аналогичная ошибка в оценке перспективности была допущена и в 1894 г., когда Парсонс на знаменитом скоростном катере «Турбиния» установил 9 гребных винтов на трех валах, что, по его мнению, должно было устранить отрицательные последствия кавитации лопастей на проектной скорости, равной 34,5 уз. Совсем недавно — в начале 70-х годов — испанские специалисты «гарантировали» повышенную эффективность гребных винтов с концевыми шайбами (винтов TVF — без концевых вихрей). Сравнительные испытания натурных судов «показали» преимущество предлагаемой конструкции, однако более тщательный анализ этих же испытаний (с учетом обрастания корпуса и других факторов) привел к противоположному заключению, подтвердившемуся в дальнейшем на практике.
Для предварительного — на самых ранних стадиях проектирования — анализа эффективности ПК нетрадиционных типов можно рекомендовать их сравнение с традиционными по таким статистическим показателям, как энерговооруженность и удельная мощность.
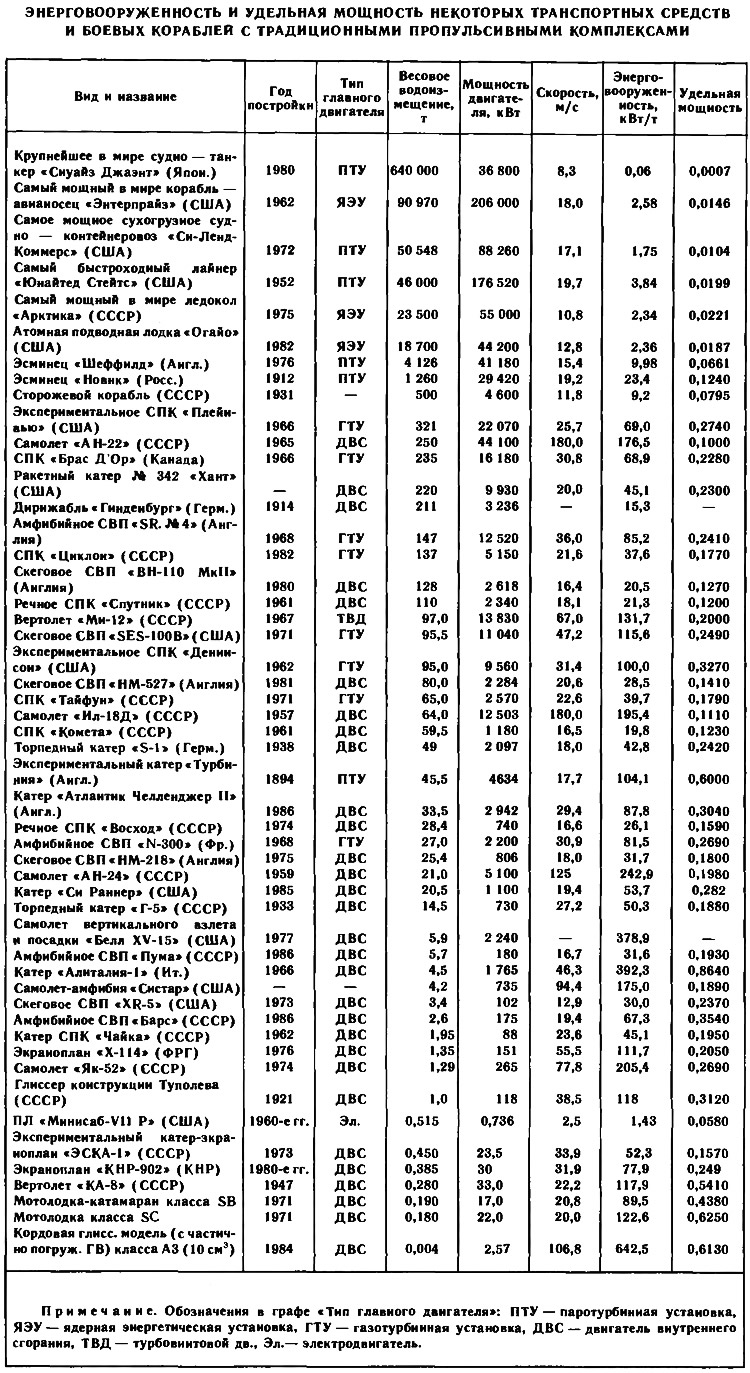
Для этой цели в прилагаемой таблице даны сведения о водоизмещающих судах, быстроходных катерах, СПК, СВП и различных летательных аппаратах, охватывающие диапазон от самого крупного транспортного судна в мире водоизмещением 640 тыс. т до кордовой глиссирующей модели водоизмещением 4 кг. В таблице даны весовое водоизмещение D (по этому признаку произведено ранжирование), суммарная мощность двигателей Ps, скорость V, а также энерговооруженность Ps/D и безразмерный параметр
который называется удельной мощностью и равен (в принятых единицах) энерговооруженности, деленной на g (9,81 м/с2) и скорость.
Как энерговооруженность, так и удельная мощность удобны для оценки эффективности транспортных средств. Например, сравнивая амфибийное СВП «SR № 4» со скеговым «ВН-110 МкII», легко заметить, что амфибийное существенно уступает по эффективности ПК, поскольку его энерговооруженность и удельная мощность больше в 2,2 и 1,9 раза соответственно. Это объясняется, в частности, тем, что на амфибийном СВП установлены воздушные винты, которые на умеренных скоростях менее эффективны, чем водяные гребные винты.
В приводимую таблицу включены лишь наиболее известные объекты, например, самый мощный в мире корабль, самые быстроходные в своем классе суда и корабли, самые большие в мире ледокол, подводная лодка, самолет, дирижабль, вертолет. Нужно оговориться, что эти данные быстро устаревают: например, только что прошел испытания самолет «АН-225» (см. «Правда» 22.12.88), который имеет полетный вес до 600 т, т. е. более чем в два раза больше, чем «АН-22», включенный в таблицу как самый крупный.
Удельная мощность (или различные модификации этого параметра) не пригодны для анализа транспортных средств в двух случаях. Во-первых, на швартовном режиме, когда скорость V равна нулю. В этом случае следует использовать энерговооруженность. Во-вторых, когда невозможно точно установить значение мощности двигателя, идущей через вал на движитель. Такая ситуация, например, возникает при рассмотрении реактивных самолетов, у которых ПК объединяет в одном агрегате и двигатель, преобразующий химическую энергию топлива в тепловую, и движитель, преобразующий эту тепловую энергию в механическую. В этом случае вместо неизвестной мощности двигателя приходится брать ту мощность, которая заключена в расходуемой за единицу времени массе топлива. Обозначая эту мощность PQ, искомый безразмерный параметр можно записать в виде

Указанный параметр имеет смысл для оценки любого транспортного аппарата, расходующего топливо для движения со скоростью, не равной нулю, и для обычных ПК может быть найден как произведение удельной мощности на величину, обратную КПД двигателя, или иначе как произведение трех сомножителей:
- PQ(R·V) — величина, обратная полному пропульсивному коэффициенту;
- R·V/Ps — величина, равная пропульсивному коэффициенту;
- Ps/(D·V·g) — удельная мощность.
Полный пропульсивный коэффициент показывает, какая часть содержащейся в топливе энергии тратится полезно — на преодоление сопротивления R движению со скоростью V, и равен произведению КПД двигателя на пропульсивный коэффициент, если потери в передаче от двигателя к движителю включены в последний.
Зная расход топлива за час Q, его теплотворную способность Кk (обычно для дизельного топлива Kk≈104 ккал/кг) и механический эквивалент тепла Е≈1,163·10—3 кВтрч/ /ккал, легко найти PQ=Q·Kk·E, после чего можно найти параметр PQ(D·V·g) или полный пропульсивный коэффициент (ППК) R·V/PQ.
Интересно отметить, что значения ППК для определенных типов транспортных средств весьма устойчивы. Например, для турбореактивного ПК самолета «ТУ-134» ППК=0,241, т. е. только около четверти химической энергии, содержащейся в топливе, используется полезно. Для крупных транспортных судов с дизельным двигателем и прямой передачей мощности на гребной винт величина ППК достигает 0,33, что соответствует расходу топлива 0,204 кг/кВт·ч. При этом КПД двигателя составляет 0,47, а пропульсивный коэффициент движителя 0,7.
В других случаях значение ППК существенно ниже: например, для речного СПК «Буревестник» с авиационным турбовинтовым двигателем и водометным движителем ППК=0,121, а для дельфина, если принять КПД преобразования химической энергии пищи и кислорода в механическую энергию, вырабатываемую мышцами, равным 0,23, и пропульсивный коэффициент — находящимся в пределах 0,26—0,40, величина ППК составит 0,060—0,092.
В качестве примера использования приведенной таблицы сделаем оценку эффективности ПК гидролета А. Бакшинова (см. «КиЯ» №104 и №111), у которого четыре наклонных частично погруженных винта обеспечивают и силу поддержания, и силу тяги, преодолевающую только воздушное сопротивление, поскольку корпус аппарата находится над водой.
Опытный образец, изготовленный автором, оказался работоспособным. Он имел массу 1 т, номинальную мощность двигателя 85 кВт (максимальную до 100 кВт) и развил скорость 18 м/с. Легко подсчитать, что в этом случае удельная мощность равна 0,481. Теперь, обратившись к таблице, замечаем, что большие значения удельной мощности имеют только пять самых легких объектов: экспериментальный катер «Турбиния», катер «Алиталия-I», мотолодка класса SC, кордовая глиссирующая модель и небольшой вертолет «Ка-8». Таким образом (учитывая, к тому же, неизбежно возникающие проблемы прочности лопастей винтов гидролета, которые несут весь вес аппарата, работая в существенно нестационарном режиме) приходим к выводу о возможной конкурентоспособности гидролета только в случае его малых размеров — не более нескольких тонн водоизмещения. Сказанное не означает, что надо препятствовать разработке новых вариантов небольшого гидролета для спортивных целей да еще такими методами, как это описано в упомянутой статье «Комсомольской правды».
Надо еще раз подчеркнуть, что проделанный анализ остается справедливым только в тех случаях, когда все неучтенные факторы для сравниваемых ПК идентичны.
При оценке перспективности разрабатываемых нетрадиционных типов ПК прежде всего стоит установить диапазон водоизмещений, в пределах которого эффективность предлагаемого ПК сравнима с достигнутым уровнем, т. е. установить целесообразный размер будущего судна. Это сразу же упростит задачу обоснования полезности предлагаемой новинки.
С другой стороны, даже при заметно меньшей, чем у традиционных ПК, эффективности нетрадиционный ПК может оказаться полезным, так как будет иметь преимущество по каким-то другим критериям; например, для спортсменов-подводников ласты или моноласт гораздо удобнее и безопаснее, чем более эффективный традиционный гребной винт с педальным приводом.
Изобретением нетрадиционных движителей и пропульсивных комплексов занято огромное число конструкторов. Представленный в двух предыдущих статьях краткий обзор основных направлений ведущихся поисков далеко не исчерпывает всего их многообразия, однако автор надеется, что его работа поможет изобретателям, а может быть, и экспертам, более широко взглянуть на эволюцию рассматриваемой области техники. Это, возможно, будет способствовать появлению новых (а также «воскрешению» забытых старых) идей, область применения которых самими авторами будет очерчена более точно и обоснована в гораздо большей степени, чем это обычно делается в настоящее время.
Примечания
1. Полный пропульсивный коэффициент — это отношение буксировочной мощности к энергии, заключенной в массе топлива, расходуемой за единицу времени.
2. Башкатов В. А. и др. Гидрореактивные пропульсивиые установки «Судостроение , 1977.
3. Удельные приведенные затраты — это экономический показатель, отражающий объем транспортной работы, выполняемой судном, и объем средств, необходимых для создания и эксплуатации этого судна.
4. См. патент № 2997013 В. А. Райса (США).
5. Першин С. В. Основы гидробионики. «Судостроение», 1988.
6. Грузинов В. И. и др. Крыльчатые движители. Л., «Судостроение», 1973.