
С основными выводами публикуемой статьи кораблестроителей А. Лукашевича и А. Русецкого полностью согласен и авиационный инженер, кандидат технических наук В. Лукашевский. Он даже считает, что при количественных оценках авторы принимали слишком благоприятные для гидролета исходные данные и допущения. В действительности для аппарата А. Бакшинова результаты сравнений могут оказаться более неблагоприятными.
Аэрогидродинамическое совершенство аппарата и его движителя наиболее полно характеризуется безразмерным параметром
где Р — масса аппарата, кг; V — скорость, м/с; N — мощность, л. с.; К — аэрогидродинамическое качество (отношение подъемной силы к сопротивлению); η — пропульсивный КПД движителя.
У судов на подводных крыльях, самолетов, экранопланов этот параметр составляет 6—8. Вертолеты — аппараты, винты которых являются несущими элементами и движителями одновременно, имеют более низкую величину Kp=2,2÷2,8. У гидролета, если использовать данные, приведенные А. Бакшиновым в его статье, значение параметра Кр получается равным 1,25, т. е. в отношении энергетических затрат он оказывается существенно менее выгодным, чем уже ставшие традиционными транспортные средства.
Эти данные и критический анализ, приведенный в статье, свидетельствуют, как мы видим, «не в пользу» гидролета, однако редакция считает полезным продолжить дискуссию по данному вопросу.
Автор конструкции аппарата, использующего для поддержания и движения наклонные частично погруженные винты, полагает, что благодаря исключению кавитации несущих элементов, независимости площади погруженных участков винтов от скорости движения судна и отсутствию вредного сопротивления погруженных элементов гидролет будет иметь высокую эффективность при скоростях свыше 200 км/ч. А. С. Бакшинов считает также, что на других транспортных средствах (СПК, экранопланах, СВП) достичь таких скоростей невозможно.
Последняя предпосылка ошибочна. Опытные СПК с кавитирующими крыльями и скоростью около 200 км/ч уже создавались1. Однако из-за больших энергозатрат (Кp=3÷4) строительство подобных СПК оказалось нерациональным, диапазон эксплуатационных скоростей судов этого типа был ограничен 100—120 км/ч.
При более высоких скоростях, на которых, как считает А. С. Бакшинов, необходимо эксплуатировать именно гидролет, более эффективны экранопланы или самолеты. Каких-либо препятствий для достижения скоростей 200 км/ч и даже значительно больших у этих аппаратов не существует.
Теперь проанализируем работу несущих винтов гидролета с тем, чтобы на основе полученных результатов можно было оценить их необходимые геометрические элементы и энергетические затраты.
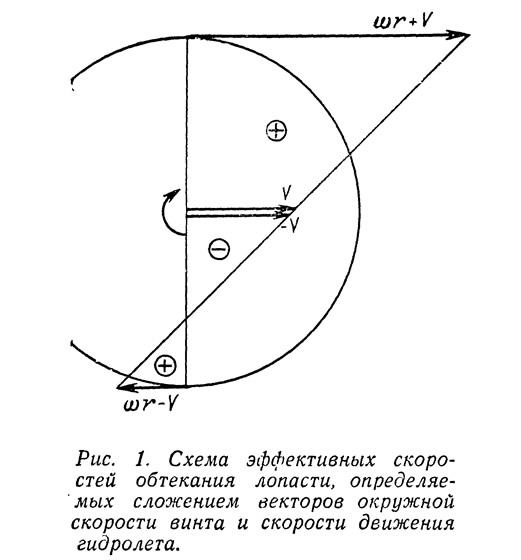
В качестве эффективных скоростей обтекания, определяющих развитие гидродинамических сил, будем рассматривать скорости, направленные перпендикулярно радиусу лопасти (рис. 1). Эффективные скорости обтекания конца лопасти для двух ее характерных положений — момента входа в воду и наибольшего погружения — определяются соотношениями
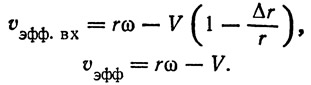
Таким образом, скорость vэфф не остается постоянной: она достигает максимального значения в момент входа в воду и выхода из нее, а в точке наибольшего погружения лопасти минимальна.
Для предотвращения кавитации максимальная скорость обтекания лопасти не должна превышать допустимого значения vдоп = vэфф. вх:
Так как разница между цдоп и vэфф по мере повышения скорости движения становится больше, то при увеличении скорости движения и неизменной величине vдоп на подводном участке средняя эффективная скорость движения лопасти будет уменьшаться.
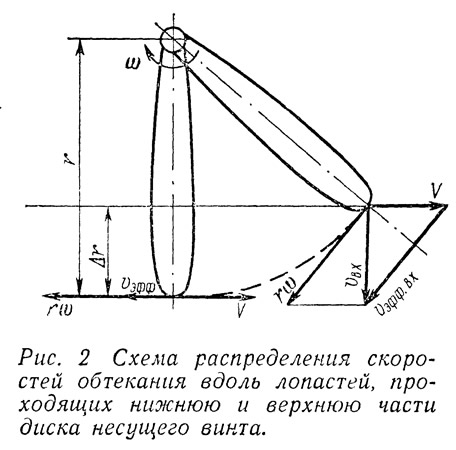
Изменение скоростей обтекания сечений по длине лопасти при ее максимальном погружении определяется линейной зависимостью, при этом скорость нижнего конца определяется величиной vэфф=+(rω—V), расположенный в воздухе центр вращения лопасти обтекается со скоростью vэфф. ц=—V, а верхний конец лопасти, целиком расположенной в воздухе, — со скоростью vэфф. в=+(rω+V). Очевидно, что на погруженной в воду лопасти имеется точка, в которой vэфф=0. Эта точка определяет максимально допустимую длину погруженного участка лопасти, поскольку при большем погружении на участке лопасти выше этой точки возникают топящая сила и отрицательная тяга. Важно, что положение точки, имеющей нулевую скорость, зависит от скорости хода. Если скорость нижнего конца лопасти остается постоянной, то по мере увеличения скорости эта точка будет смещаться вниз, уменьшая эффективную длину лопасти (рис. 2).
Допустимую относительную длину погруженного участка лопасти можно определить соотношением
Из этого соотношения следует, что при заданном диаметре винтов длина их погруженной части должна уменьшаться по мере увеличения скорости.
При установившемся движении аппарата вертикальная гидродинамическая сила, возникающая на винтах, должна быть равна весу аппарата. Величина определяется соотношением
где vср — средняя скорость обтекания лопастей; S — площадь погруженной части лопастей; су — усредненный коэффициент подъемной силы погруженных элементов.
Поскольку величина гидродинамической силы не должна зависеть от скорости хода, уравнение справедливо лишь в случае, когда произведение v2срS не зависит от скорости. Однако, как было доказано выше, vср уменьшается по мере увеличения скорости движения; одновременно становится меньше и длина погруженного участка лопасти. Отсюда следует важный вывод: при постоянном весе аппарата по мере увеличения скорости движения необходимо увеличивать диаметр несущих винтов.
Используя обычные соотношения теории крыла, нетрудно оценить необходимые диаметры несущих винтов. Оценку проведем для судна водоизмещением 65 т. В качестве прототипа возьмем известные СПК типа «Комета». При этих и дальнейших оценках будем принимать исходные данные с запасом в заведомо благоприятную для гидролета сторону.
Для контроля на рис. 3 нанесена точка, полученная прямым пересчетом по гидродинамической теории подобия с испытанного гидролета; ее хорошее согласование со сделанными оценками подтверждает их достоверность. Сплошная кривая свидетельствует о первом принципиальном недостатке гидролета: необходимости оборудования его несущими винтами чрезмерно большого диаметра. Так, на судне с водоизмещением и скоростью СПК «Комета» следует установить четыре винта диаметром 18 м, причем с увеличением скорости этот диаметр необходимо увеличивать, при скорости 200 км/ч он должен достигать фантастической величины — 30 м.
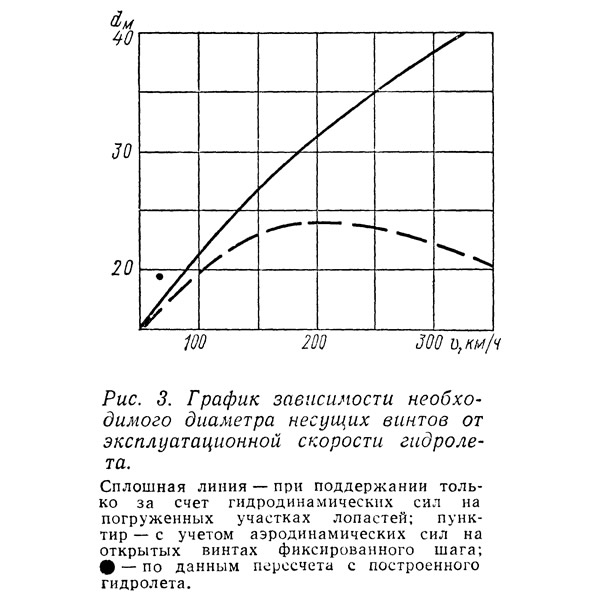
Приведенные оценки не учитывают аэродинамические силы. Между тем, при скоростях выше 100 км/ч их влияние за счет больших скоростей обтекания лопастей воздухом становится существенно. На рис. 3 нанесена пунктирная кривая, также рассчитанная для судна водоизмещением 65 т, но с учетом аэродинамических сил на надводной части винта. Этот график, на котором максимальное значение кривой соответствует скорости около 200 км/ч, позволяет сделать еще один существенный вывод: для открытых винтов
постоянного шага скорости свыше 200 км/ч недостижимы. Если выбрать диаметр винта соответствующим скоростям свыше 200 км/ч, то данные винты не обеспечат разгона аппарата на промежуточных скоростях. Если принять диаметр около 25 м, соответствующий максимальному значению кривой, аппарат при больших скоростях взлетит в воздух. Этот недостаток можно преодолеть, если ввести перекладку лопастей в течение оборота (по примеру автомата «переноса» вертолета). При этом, однако, угол атаки в воздухе нужно не увеличивать, как предлагает Л. С. Бакшинов, а уменьшать. Винты можно закрыть кожухами, что также предлагает автор конструкции, однако и в том, и в другом случае это приведет к нереальному увеличению диаметра винтов. Кроме того, установка кожухов повлечет за собой большие дополнительные потери на сопротивление воздушно-водяной смеси внутри кожуха и на его внешнее сопротивление.
Теперь попробуем оценить эффективность гидролета как транспортного средства, с точки зрения мощности, необходимой для обеспечения движения.
Аналогом самолетов в судостроении являются СПК и экранопланы. Предлагаемый же А. С. Бакшиновым аппарат по существу аналогичен вертолету. Именно поэтому гидролет по технико-экономическим показателям должен существенно уступать СПК в диапазоне скоростей, присущих созданному и испытанному изобретателем аппарату, и экраноплану при более высоких скоростях. В то же время гидролет не обладает преимуществом вертолета, с точки зрения пространственного маневрирования и висения, поскольку у судов, в отличие от летательных аппаратов, эти качества легко достигаются за счет гидростатических сил.
У гидролета вся мощность, обеспечивающая поддержание и движение, реализуется несущими винтами, однако, начиная с некоторой скорости движения, в связи с увеличением воздушного сопротивления тяга несущих винтов оказывается недостаточной, требуется применение дополнительных движителей. Поэтому в общем случае мощность складывается из двух составляющих — мощности на вращение несущих винтов и мощности на преодоление воздушного сопротивления.
При скоростях до 80 км/ч, когда воздушное сопротивление невелико, двигаться можно только за счет тяги несущих винтов. При расчете необходимой для движения гидролета мощности, который производился по общеизвестным формулам, значения гидроаэродинамического качества элементов лопастей, коэффициента сопротивления корпуса и КПД дополнительного движителя принимались на основании статистических данных. При этом, как и при определении диаметра винтов, выбирались величины коэффициентов, обеспечивающие минимальные значения мощности, т. е. приводящие к ошибке в благоприятную для гидролета сторону.
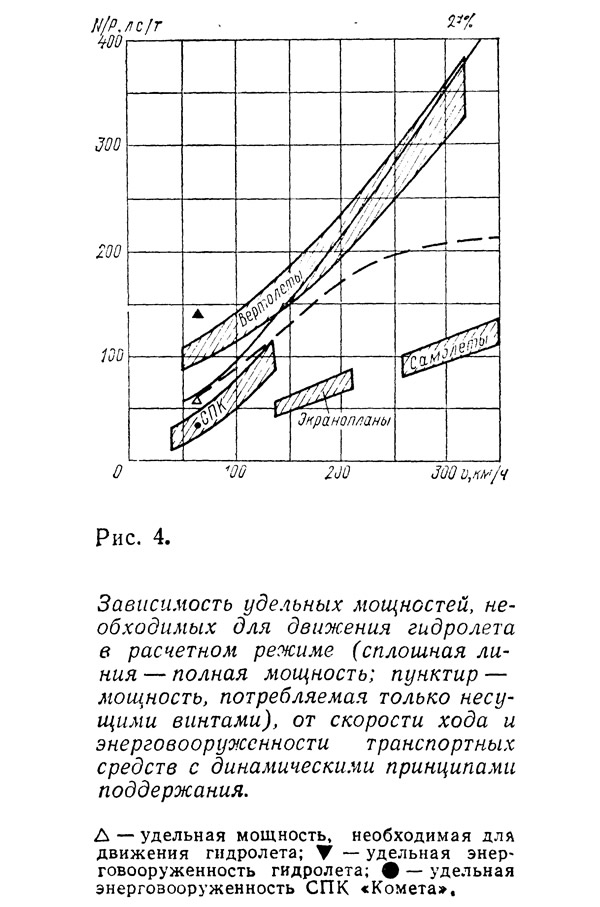
Для сопоставления удельной мощности на рис. 4 нанесены построенные по статистическим данным кривые, характеризующие удельную энерговооруженность СПК, самолета, экраноплана и вертолета2. Как видно из рисунка, удельная мощность, необходимая для установившегося движения гидролета, в 2—3 раза превышает удельную энерговооруженность СПК, экраноплана и самолета и близка к энерговооруженности вертолета. Следует учитывать, что удельная мощность, необходимая для обеспечения установившегося движения летательных аппаратов и судов с динамическими принципами поддержания, всегда в 1,2—2 раза меньше удельной установочной мощности (энерговооруженности), что связано с необходимостью обеспечения выхода на расчетный режим в неблагоприятных условиях. У гидролета установочная мощность составляет 140 л. с. при мощности на расчетном режиме 60 л. с.
Таким образом, гидролет не расширяет диапазона скоростей существующих морских транспортных средств, да и в этом диапазоне реализация его движения требует вдвое-втрое больших энергетических затрат. Кроме того, необходимость размещения огромных несущих винтов, осуществление сложных приводов, обеспечение прочности лопастей, работающих в условиях переменных нагрузок, создают чрезвычайно большие конструктивные трудности, преодоление которых, если и возможно, не оправдывается достигаемыми результатами. Гидролет не позволяет также решать какие-либо народнохозяйственные задачи, с которыми не могли бы справиться другие, более экономичные, средства.
Все изложенное, а также недостатки, связанные со сложностью обеспечения мореходности, неудобствами эксплуатации и базирования, дают основание утверждать, что гидролет не имеет перспектив применения в качестве морского транспортного средства.
Примечания
1. Рой Макливи. Суда на подводных крыльях и воздушной подушке. Л.: Судостроение, 1981.
2. Н. И. Белавин. Экранопланы. Л.: Судостроение, 1977.