
В каких случаях целесообразно держать под контролем гидродинамические характеристики (ГДХ) глиссирующего корпуса? Вообще говоря, лучше в любых. Для малых судов характерны значительный разброс величин нагрузки, центровки, скоростей и возможность в любой момент подправить ходовую посадку для улучшения экономичности и комфортности лодки не будет лишней. Совершенно необходимы дополнительные устройства управления ГДХ в следующих ситуациях:
- проектной ошибки, приведшей к существенному "уходу" центровки в неоптимальную область, например, при замене двигателя на более тяжелый или с другим расположением агрегатов. Сюда же отнесем случаи строительной или эксплуатационной деформации днища, в результате которых давления на нем перераспределяются, вызывая склонность к подскакиванию судна на ходу (дельфинированию) либо к чрезмерному прижатию носа или крену на один из бортов;
- возможного нарушения оптимальной центровки при эксплуатации за счет принятия избытка груза либо пассажиров в отдельные отсеки и помещения судна с указанными выше последствиями;
- перегруза судна либо недостаточной мощности двигателя, неспособного разогнать судно до скорости начала глиссирования. Потребуется принятие оперативных мер для повышения действующей на днище подъемной силы;
- движения судна при различных волновых условиях, когда для ослабления силы ударов волн целесообразно уменьшать ходовой дифферент, а на тихой воде, напротив, увеличивать его для снижения сопротивления.
Как это работает
Глиссирующие катера относятся к группе судов с динамическим поддержанием. По мере увеличения скорости движения происходит рост гидродинамических давлений в общей системе сил, действующих на судно. Динамическая составляющая при этом возрастает пропорционально квадрату скорости, и в результате наряду с архимедовой силой поддержания появляется гидродинамическая сила поддержания. Для использования этих сил в целях снижения сопротивления движению у судов с динамическим поддержанием имеются элементы, называемые несущими поверхностями или несущим комплексом. У глиссирующих судов несущим комплексом является совокупность специально спрофилированных элементов обшивки корпуса.
В настоящее время не только определены рациональные соотношения главных размерений и формы корпуса глиссирующих судов, но и разработаны технические средства управления гидродинамическими характеристиками несущего комплекса. По аналогии с авиационными средствами механизации крыла их еще называют средствами механизации несущей поверхности. К их числу относятся в первую очередь транцевые плиты и интерцепторы. Кроме того, активно управлять посадкой глиссера помогают устройства регулирования "откидки" подвесного мотора или угловой колонки, способные изменять направление вектора тяги в вертикальной плоскости.
В дальнейшем будут применяться следующие обозначения: α — угол установки транцевой плиты относительно килевой линии несущей поверхности; ε — отношение полного сопротивления к весу судна, или коэффициент глиссирования (в ряде публикаций его называют "обратным гидродинамическим качеством"); φ — угол дифферента по килевой линии несущей поверхности;
где FrΔ — число Фруда по водоизмещению; FrB — число Фруда по ширине несущей поверхности; v — скорость судна, м/с; g — ускорение свободного падения, м/с2; V — объемное водоизмещение, м3; B — ширина несущей поверхности, м.
Используемые устройства
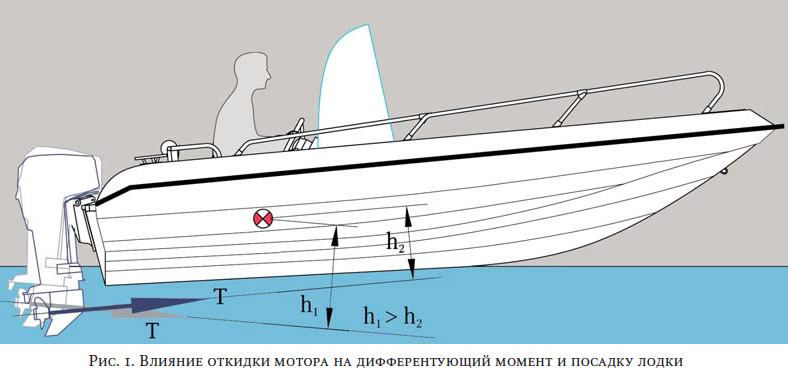
Устройства регулирования откидки мотора. Начнем с использования откидки как наиболее доступного способа оперативного управления посадкой. При изменении откидки мотора или угловой колонки относительно транца судна изменяется направление вектора упора винта (рис. 1). Это приводит к изменению значения момента, стремящегося поднять нос судна, соответственно изменяются угол атаки днища и его смоченная длина. Физически действие откидки аналогично перемещению в некоторых пределах общего центра тяжести судна, поэтому с ее помощью можно скомпенсировать чрезмерную загруженность носа или кормы и довести скорость хода до наивысшего значения. Следует заметить, что не все суда одинаково охотно реагируют на нажатие кнопки механизированной откидки. Очень вяло реагируют на откидку разборно-надувные, относительно гибкие лодки — приложенного к транцу момента для них часто не хватает, чтобы оторвать от воды "залипший" нос.
Влияние откидки может быть существенно повышено за счет применения специальных крыльев, устанавливаемых на антикавитационную плиту подвесного мотора. В этом случае момент создается не только упором винта, но также дополнительной подъемной или притапливающей силой, возникающей на крыле. С помощью крыльев удобно компенсировать чрезмерную кормовую центровку самых малых лодок с румпельным управлением мотором, на более же крупных судах их следует применять осмотрительно — крылья добавляют сопротивления движению, в результате чего скорость может понизиться на 3-5 км/ч.
Транцевые плиты по характеру своего действия можно представить как аналог применяемых в авиации закрылков на задней кромке несущего крыла или щитков, устанавливаемых на нагнетающей (нижней) поверхности крыла. Физическая картина их действия состоит в дополнительном отклонении потока, набегающего на несущую поверхность (щитки на верхней поверхности крыла работают по-другому). В результате этого на самой транцевой плите и на несущей поверхности перед ней давления возрастают и меняется их распределение по длине судна. Указанные явления изменяют всплытие и дифферент судна. Заметим, что в зависимости от скорости, посадки, обводов и размерений судна они могут оказывать как положительное, так и отрицательное влияние на его сопротивление и устойчивость движения.
Информация об изображении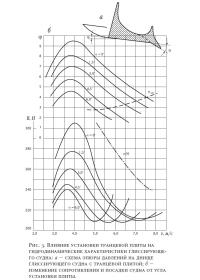
Рис. 3. Влияние установки транцевой плиты на гидродинамические характеристики
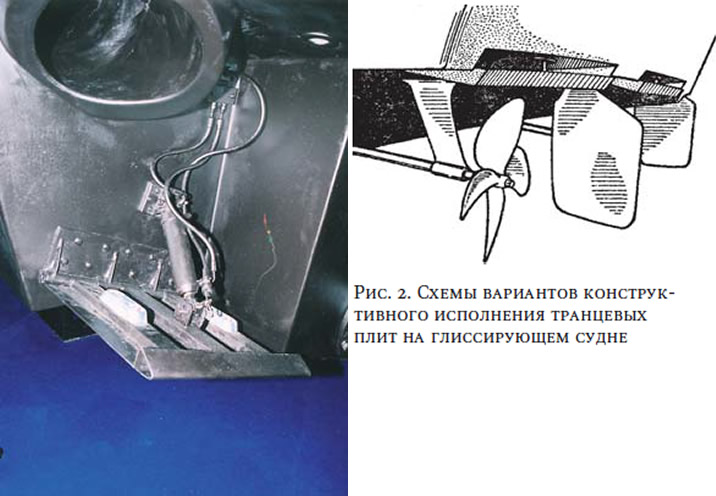
Транцевые плиты устанавливают на задних кромках плоской или килеватой основной несущей поверхности судна. По конструкции они могут выполняться неподвижными, регулируемыми и управляемыми в процессе движения судна. На рис. 2 представлены схемы конструктивного исполнения транцевых плит [1]. Известно, что создание отгиба днища в кормовой части судна приводит к существенному уменьшению ходового дифферента и сопротивления в переходном режиме. На рис. 3 [2] показаны кривые буксировочного сопротивления и углы ходового дифферента модели глиссирующего судна с различными углами установки транцевых плит в корме. Как следует из графиков, влияние углов установки транцевых плит на сопротивление по мере увеличения скорости изменяется. При определенных условиях влияние транцевых плит может привести к росту сопротивления. Это происходит в тех случаях, когда углы ходового дифферента глиссера оказываются меньше оптимального. В большинстве случаев в зависимости от килеватости несущей поверхности и формы днища в плане диапазон оптимальных углов атаки составляет 3.5-5.5°. Уменьшение углов атаки несущих поверхностей по сравнению с оптимальными приводит к резкому возрастанию площади смоченной поверхности. Это увеличивает сопротивление трения, которое на режиме чистого глиссирования играет существенную роль в полном сопротивлении судна.
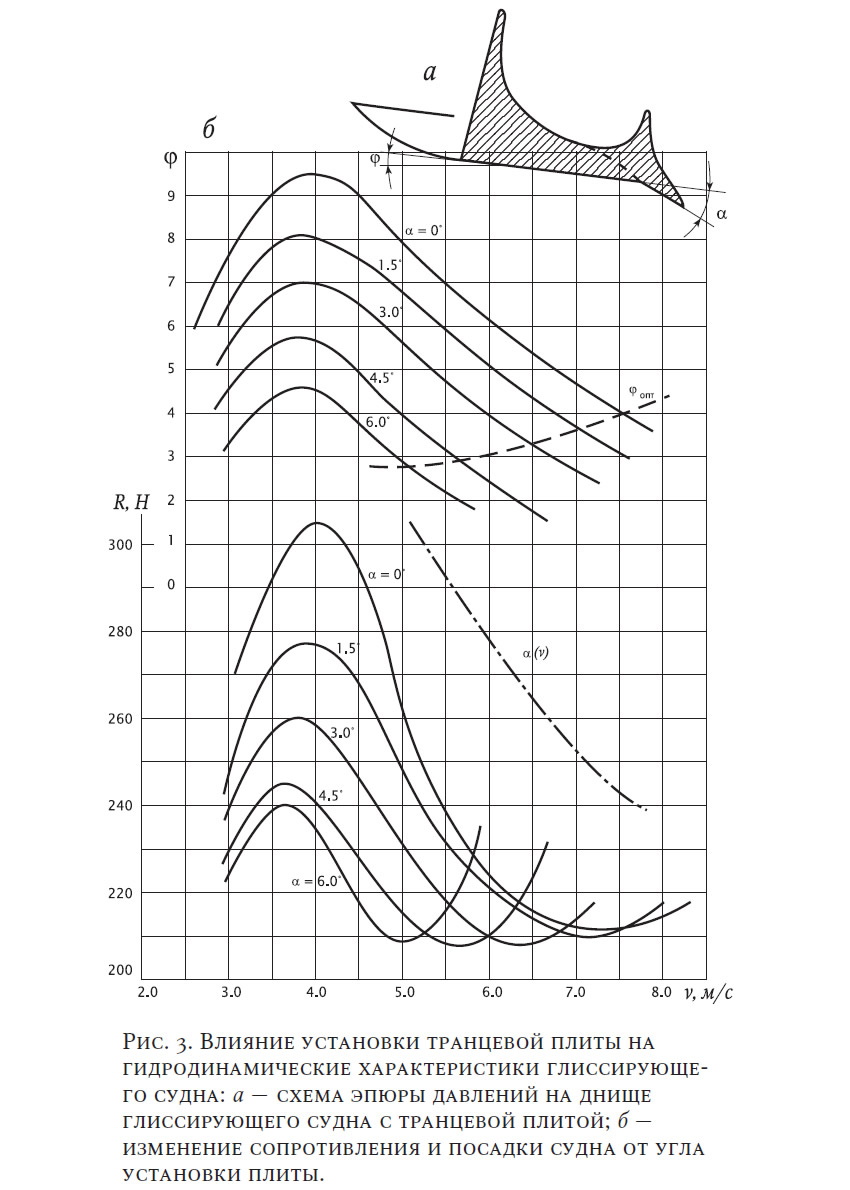
Рис. 3. Влияние установки транцевой плиты на гидродинамические характеристики
Для поддержания углов дифферента, близких к оптимальным в широком диапазоне скоростей движения, необходимо с изменением скорости менять и угол установки транцевых плит. Отсюда следует, что на судах, рассчитанных на глиссирование в широком диапазоне скоростей, предпочтительнее использовать управляемые транцевые плиты, которые могут располагаться под наиболее выгодным для каждого режима движения углом атаки.
При использовании управляемых транцевых плит посадка глиссера меняется за счет изменения величины продольного гидродинамического момента. На рис. 3,а схематически показано распределение давлений на днище глиссирующего катера с транцевой плитой. Изменение продольного момента, вызываемое изменением положения плиты, обусловлено не только появлением дополнительной гидродинамической нормальной силы на самой плите, но и перераспределением давлений на днище. Транцевые плиты способны исправить и крен на один из бортов, возникший вследствие смещения ЦТ или реакции вращающегося винта.
Как показывает анализ испытаний схематизированных моделей в опытовом бассейне, транцевые плиты наиболее эффективны при движении в переходном режиме при относительных скоростях FrΔ=2÷3. В отдельных случаях при правильном выборе площади и углов установки транцевых плит удается практически полностью ликвидировать "горб сопротивления", а при скоростях развитого глиссирования плиты могут быть полезны для устранения неприятного дельфинирования судна. Эффективность действия транцевых плит как средства управления посадкой глиссирующего судна и снижения его сопротивления зависит также от коэффициента статической нагрузки СД и относительного положения центра тяжести по длине xg. С увеличением СД и смещением центра тяжести глиссирующего судна в нос эффективность действия транцевых плит несколько снижается.
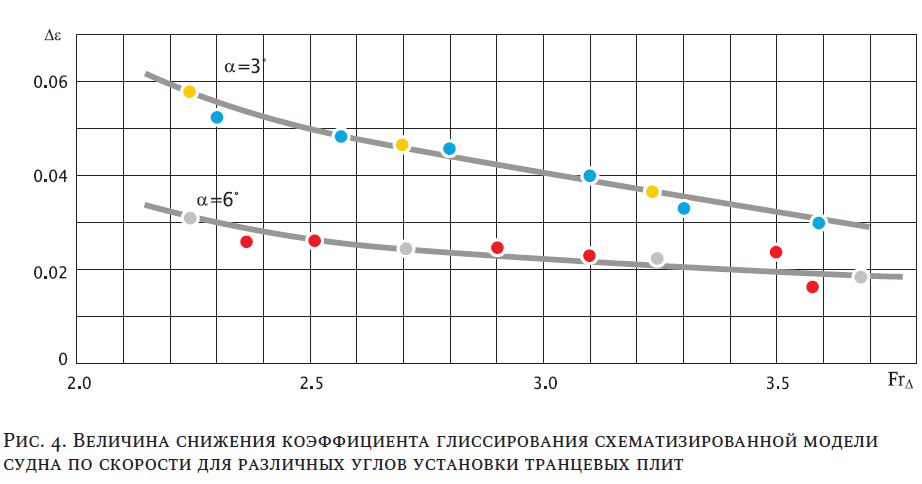
При выборе характеристик транцевых плит и геометрии корпуса глиссера в соответствии с параметрами режима движения можно достичь повышения максимально возможного гидродинамического качества, соответствующего минимуму буксировочного сопротивления судна. Характерная зависимость уменьшения коэффициента глиссирования в зависимости от скорости для двух положений транцевых плит представлена на рис. 4.
Литература
- 1. Баадер Х. Разъездные, туристские и спортивные катера. Л., Судостроение, 1976, 384 с.
- 2. Егоров И. Т., Буньков М. М., Садовников Ю. М. Ходкость и мореходность глиссирующих судов. Л., Судостроение, 1976, 336 с.
Промышленность предлагает
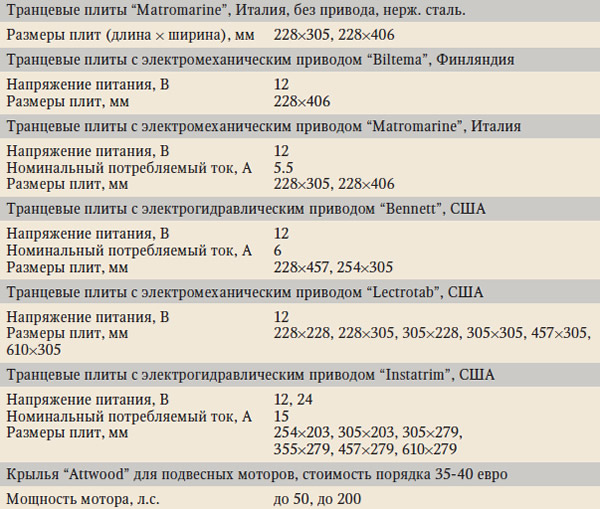
При возникновении проблем с правильной посадкой катера или моторной лодки судовладельцу нет нужды изобретать велосипед, занимаясь самостоятельным изготовлением транцевых плит. Эти устройства как по частям, так и в комплекте с приводом предлагают морские магазины (например, "Maritim", "Biltema", "Мореман") для широкого диапазона размеров судов. Стоимость плит с приводом составляет от 380 до 700-900 евро, отдельная плита с регулировочным талрепом обойдется примерно в 100 евро.
При выборе размеров транцевых плит каталог "Мореман" рекомендует следующие соображения: лучше работают относительно короткие плиты, удлиненные варианты устанавливаются при недостатке ширины транца для их размещения. Ориентировочно при длине плиты 228 мм каждые 0.3 м (1 фут) длины судна требуют 25 мм (1 дюйм) ширины плиты.
Интерцепторы на днище глиссирующих и полуглиссирующих судов являются полным аналогом применяемых в авиации интерцепторов, или щитков, устанавливаемых поперек потока на поверхности крыла. С точки зрения физики принцип их действия состоит в принудительном отрыве набегающего потока от несущей поверхности. Однако использование результатов действия интерцепторов на крыле самолета и на несущей поверхности глиссирующего судна существенно отличаются друг от друга. Если в авиации действие интерцептора или щитка используется для снижения подъемной силы крыла в процессе управления самолетом, то в судостроении применяется эффект повышения давления перед выдвинутым в поток интерцептором, который увеличивает несущую способность поверхностей скоростного судна. Поэтому интерцепторы на самолете располагают на верхней (засасывающей) поверхности крыла, а на несущих поверхностях судов (подводном крыле) — на нижней, нагнетающей, поверхности или днище глиссера.
Изучение влияния интерцепторов на гидродинамические характеристики несущих поверхностей началось еще на заре авиации,однако применительно к использованию на скоростных судах эти научные данные оказались востребованы лишь в последнее время. Применение интерцепторов в сочетании с современными системами управления и приводами позволило с успехом реализовать их возможности не только для снижения сопротивления глиссеров и управления их посадкой на ходу, но и для уменьшения килевой и бортовой качки.
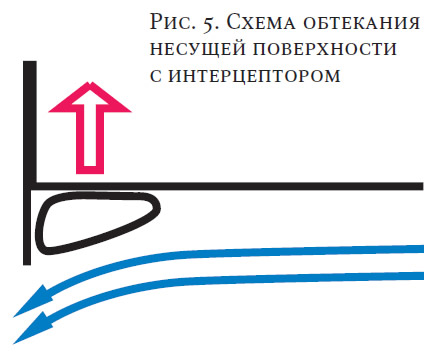
Как видно из схемы обтекания несущей поверхности глиссирующего катера с интерцептором (рис. 5), высота выступающей под несущую поверхность кромки интерцептора по отношению к смоченной длине этой поверхности обычно составляет единицы процентов. Действие интерцептора основано на том, что набегающий на него поток подтормаживается. Это приводит к возникновению так называемой "застойной" зоны перед самим интерцептором. Основной поток (с пограничным слоем) отрывается от несущей поверхности, отклоняясь вниз под влиянием повышенного давления, образующегося в подторможенном потоке "застойной" зоны. Протяженность зоны отрыва потока по длине в зависимости от формы днища и параметров движения составляет одну-две высоты интерцептора. Давление в этом районе для значений высот интерцепторов, равных 1-4% длины смоченной поверхности, достигает 0.50.6 величины скоростного напора соответственно.
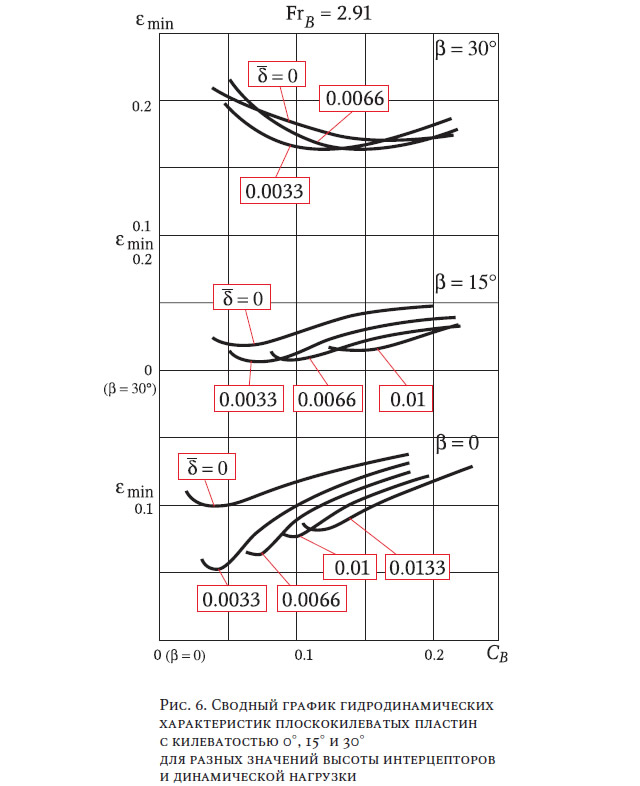
Влияние высоты интерцепторов на гидродинамические характеристики глиссирующих несущих поверхностей наглядно иллюстрируют экспериментальные зависимости минимально достижимых (при оптимальных центровках) коэффициентов глиссирования пластин с разной килеватостью при разных нагрузках [1]. Сводный график экспериментальных зависимостей приведен на рис. 6.
Далее, в дополнение к ранее приведенным, используются следующие обозначения:
— коэффициент динамической нагрузки; CТ=2RT/ρv2S — коэффициент полного сопротивления; RT — полное сопротивление; S — смоченная площадь несущей поверхности, м2; ρ — массовая плотность жидкости, кг/м3; ε=RT/ρgV — коэффициент глиссирования, или отношение полного сопротивления к весу судна; β — угол килеватости несущей поверхности, град.; τ — угол атаки несущей поверхности, град.; α — угол волнового склона, град.; ψ — амплитуда килевой качки, град.; θ — амплитуда бортовой качки, град.; h — всплытие, м; δ — высота интерцептора, м;
Как следует из анализа представленных зависимостей, рациональным подбором размеров интерцептора можно улучшить характеристики плоскокилеватого днища быстроходного судна. Под этим подразумевают характеристики, достигаемые правильно спроектированным судном с традиционным днищем при оптимальной центровке. Следует учитывать, что с увеличением килеватости днища возможный выигрыш снижается, а вероятность получить отрицательный результат вследствие неоднозначности совместного влияния нагрузки, центровки и высоты интерцепторов повышается. Необходимо отметить, что и для, казалось бы, наиболее ярко выраженного влияния интерцепторов на малокилеватом днище подбор благоприятного сочетания перечисленных факторов может оказаться совсем непростым делом.
Действие интерцепторов имеет аналогию с обтеканием поверхности, имеющей продольную вогнутость очень большого радиуса (например, в 20-40 раз превышающего ширину днища). Испытания в Опытовом бассейне таких обводов показали, что они имеют меньшее сопротивление движению, нежели плоские пластины, однако и диапазоны режимов устойчивого движения у них сужаются. Именно поэтому конструкторы глиссирующих судов чаще всего останавливают свой выбор на обводах, имеющих в корме призматические или близкие к ним образования днища.
Гораздо проще дело обстоит в тех случаях, когда интерцепторы применяют для того, чтобы повлиять на ходовой дифферент. Это касается случаев, когда за счет установленных или допускающих регулировку интерцепторов устраняют недостатки построенного судна, и тех, когда управляют дифферентом катера в целях оптимизации углов атаки для выбранного режима движения. Поясним это на примерах.
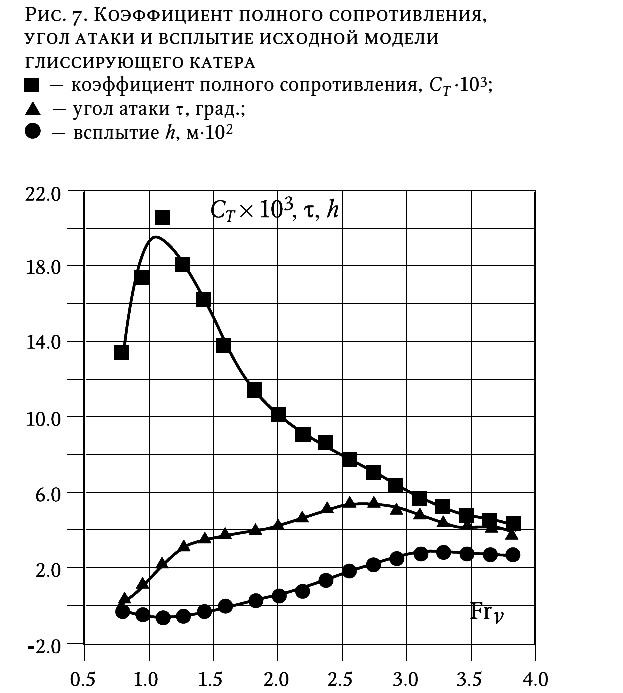
При испытаниях в Опытовом бассейне модели глиссирующего катера в масштабе 1:20, имеющего призматическую плоскокилеватую форму несущей поверхности ("моногедрон"), получены данные, на основе которых построены графики рис. 7 [5]. Длина натурного катера — 29 м, ширина — 4.1 м, осадка — 0.92 м; водоизмещение — 32.1 т, расчетная скорость — 40 уз.
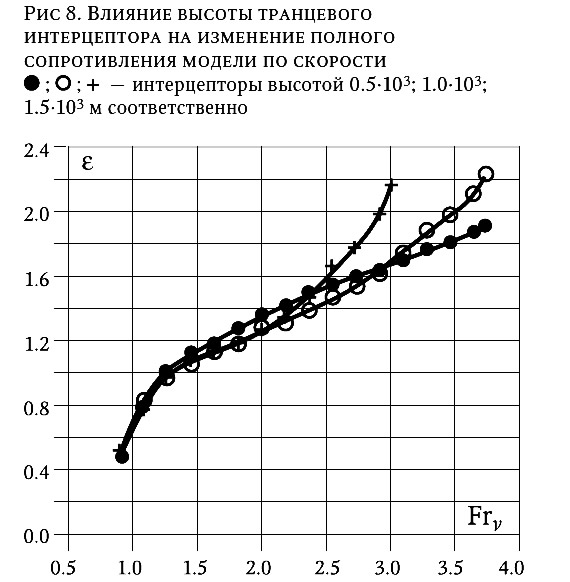
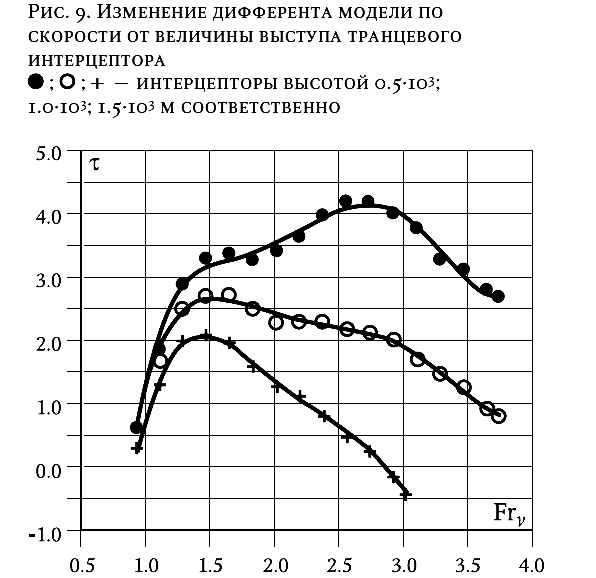
Затем на модели судна устанавливались транцевые интерцепторы и повторялись исследования гидродинамических характеристик для каждого значения высоты интерцептора. Результаты испытаний исходной модели с тремя вариантами интерцепторов приведены на рис. 8 и 9.
Сопоставляя графики изменения дифферента по скорости судна и кривые полного сопротивления, нетрудно прийти к выводу, насколько эффективно применение изменяемых по высоте интерцепторов для обеспечения оптимальных углов атаки при выбранной скорости движения.
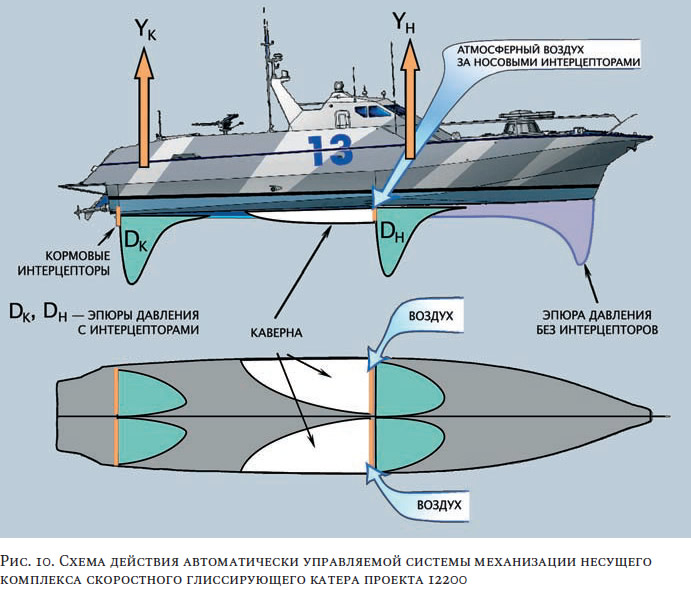
Развитие данной идеи привело к появлению систем управления посадкой судна на ходу, в том числе и с использованием устройств автоматики. При этом оказалось целесообразным разделить функции элементов механизации, управляющих дифферентом катера, его креном, а также влияющих на уменьшение сопротивления движению на полном ходу. В частности, транцевые интерцепторы позволяют придать глиссирующему судну оптимальную посадку (дифферент) во всем диапазоне параметров движения, включая переход через "горб сопротивления" и глиссирование. Выдвижение расположенных на миделе интерцепторов приводит к образованию за ними зоны разрежения, прорыву атмосферного воздуха через скулу на днище и снижению сопротивления. А побортное выдвижение секционированных интерцепторов можно использовать в качестве активных успокоителей качки на волнении, так как кренящие и дифферентующие моменты компенсируются за счет местных повышений давления на определенном участке днища.
На рис. 10 представлена принципиальная схема действия автоматически управляемых элементов механизации скоростного патрульного катера — перехватчика проекта 12200 "Соболь" [4] разработки ЦМКБ "Алмаз". Это судно, вобравшее в себя много передовых технических решений, способно на практике подтвердить расширение возможностей скоростных глиссирующих катеров с автоматизированными элементами механизации несущего комплекса.
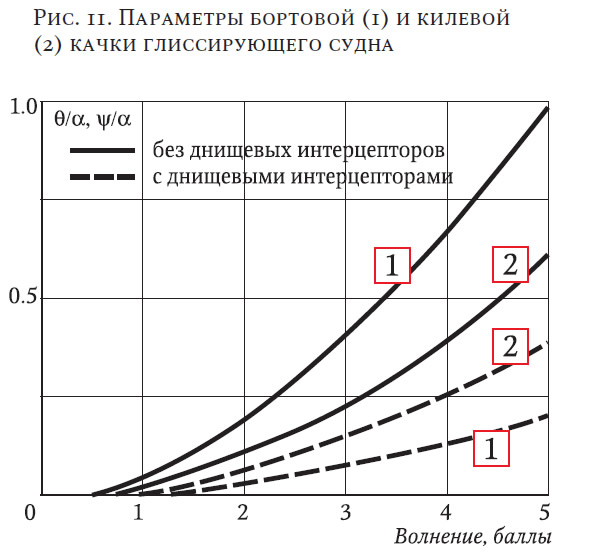
Результаты испытаний натурного катера с подобной системой автоматически управляемых интерцепторов были положены в основу расчетов эффективности успокоения различных видов качки [2]. Полученные зависимости в обобщенном виде представлены на рис. 11.
Суммируя подтвержденные на практике выводы, можно заключить, что применение устройств управления отрывом потока с днища быстроходного судна позволяет обеспечить оптимальную посадку судна на всех режимах движения, снизить сопротивление до 25%, умерить в 3-5 раз бортовую качку и в 1.2-1.5 раза — килевую на развитом морском волнении [3].
Разработка соответствующих конструктивных элементов механизации несущих поверхностей глиссера, приводов и систем автоматизированного управления позволила приступить к созданию глиссирующих катеров нового поколения, отличающихся повышенной мореходностью. Из известных авторам скоростных судов это пока только катера специального назначения, однако в ближайшем будущем можно ожидать появления таких устройств на скоростных комфортабельных яхтах. Впоследствии, при появлении недорогих образцов автоматизированных систем управления элементами механизации несущих элементов скоростных судов, подобные принципиальные проектные решения получат массовое распространение.
Литература
- 1. Банникова Т. И., Банников Ю. М., Лукашевский В. А., Цейтлин М. Ю. Исследование гидродинамических характеристик глиссирующих поверхностей с интерцепторами на задней кромке. — Тр. ЦАГИ, 1978, вып. 1906, 22 с.
- 2. Пономарев А. В., Садовников Д. Ю., Садовников Ю. М. Пути повышения ходовых и мореходных качеств судов // Судостроение, 1997, № 1, с. 38.
- 3. Пономарев А. В., Садовников Ю. М., Мавлюдов М. А. Применение механизма отрывных течений в судостроении // Судостроение, 1999, № 1, с. 12-16.
- 4. Jing-Fa Tsai, Jeng-Lin Hwang, Shean-Kwang Chou. Study on the Compound Effects of Interceptor with Stern Flap for two Fast Monohulls with Transom Stern // FAST, 2003, с. 23-28.