
Показателен такой пример. Известно издавна бытующее среди авиастроителей изречение: «Помни, что по законам аэродинамики жук летать не может!» За счет чего же это тяжелое, с малоэффективными крыльями насекомое поднимается в воздух? Только недавно выяснилось: за счет поистине невероятной «энерговооруженности»!
Публикуемые ниже материалы посвящены секретам скорости плавания дельфина. Многое в этой области еще остается неизученным, многое — спорно. Печатая, казалось бы, взаимоисключающие статьи, мы считали, что будет интересно познакомиться с различными мнениями, познакомиться с «горячей точкой» молодой науки — бионики.
Практически нет границ познания. Еще и сегодня много тайн и удивительных «изобретений» хранит живая природа — конструктор, изобретатель, великий творец. Вся история человечества — непрерывный процесс познания тайн природы, ее законов и путей развития. «От живого созерцания к абстрактному мышлению и от него к практике»,1 — так определил В. И. Ленин диалектический путь познания истины, познания объективной реальности.
На определенном этапе этого развития начали формироваться нынешние биотехнические научные направления, задачей которых является изучение конструкций и процессов в биологических объектах, их воспроизведение и использование в технических устройствах и системах.
Отдавая должное бионике как современной и перспективной новой науке, мы отнюдь не собираемся утверждать, что ученые и инженеры в своей деятельности только тем и должны заниматься, что копировать биологические прототипы. На базе открытых общих законов естествознания человек создал большую часть современных технических систем, приборов и устройств, которых живая природа никогда не знала. Тем не менее, природа и техника «строят» по одним и тем же законам, и оптимальные конструкции часто оказываются одинаковыми.
Приведем два примера из множества, известных истории техники. К сотой годовщине Великой французской революции в Париже по проекту инженера Гюстава Эйфеля была воздвигнута ныне известная всему миру Эйфелева башня, конструкцию которой он рассчитал математически.
Впоследствии было установлено, что элементы — ячейки башни — в точности совпадают по геометрическим параметрам и строению с элементами большой берцовой кости человека, выдерживающей, как известно, весьма большие нагрузки.
При создании скоростных самолетов авиаконструкторы столкнулись с явлением флаттера — вибрации фюзеляжа и крыльев, приводившей к разрушению конструкции. В конце концов средство борьбы с флаттером, связанным с возникновением вихревых пульсаций, было найдено: на концах крыльев стали делать утолщения. Уже после этого инженерам стало известно, что точно такие же утолщения имеются на кончиках крыльев стрекозы! Нетрудно представить себе, сколько сил, средств и даже человеческих жизней могло бы сберечь изучение механизма крыльев стрекозы.
Одним из важнейших разделов бионики является гидробионика. Человечество, осваивающее космос, уже не может игнорировать такую близкую и в то же самое время очень трудную для освоения среду, как Мировой океан с его несметными богатствами питательных продуктов и сырья. Водные просторы занимают 3/4 поверхности земного шара, их населяют 57 классов животных (из 63, насчитываемых на земле) и 50 тысяч различных видов растений. Прототипов, как видим, вполне достаточное количество! Создавая надводные и подводные устройства для освоения океана, ученые и инженеры все чаще обращаются к различным биологическим объектам, чтобы, изучив особенности их плавания и деятельности, реализовать современные природные схемы и принципы в своих технических конструкциях.
Океан является колыбелью всего живого на земле, и в этом смысле — колыбелью человечества. Парадокс же заключается в том, что обратное проникновение в него человека, как и внедрение различных технических средств, — задача технически очень сложная.
Рассмотрим только один аспект этой проблемы. Плотность воды в 800 раз больше плотности воздуха, поэтому любым движущимся объектам приходится преодолевать значительное сопротивление среды, которое, как правило, возрастает пропорционально квадрату скорости. Отсюда возникает сложная энергетическая проблема и одновременно необходимость какими-то специальными мерами снизить сопротивление движению.
Одно из актуальных направлений современной гидробионики — гидродинамика плавания морских животных, которая изучает их энергетические возможности и скоростные качества, способы уменьшения сопротивления движению, особенности их движительного аппарата.
Наиболее распространенные биотехнические исследования по гидродинамике плавания морских животных относятся к изучению формы их тел. Эти исследования стимулируются интересом человека к тем весьма высоким скоростям, которые могут развивать морские животные при довольно ограниченных энергетических возможностях. Так, китообразные, к которым относят зубатых (дельфнн, кашалот, косатка, белуха) и усатых (синий кит, сейвал, финвал) китов, развивают скорость до 20 уз. С такой же скоростью могут плавать акулы. Совершенно феноменальную скорость — до 80—100 уз — кратковременно, в момент нападения, развивает меч-рыба.
На выработанные в процессе эволюции оптимальные для конкретных условий обитания формы тела морских животных ученые обратили внимание уже давно. Это направление гидродинамики уже не раз доказывало важность обращения к арсеналу живой природы, давало ощутимую пользу в виде ряда технических решении.
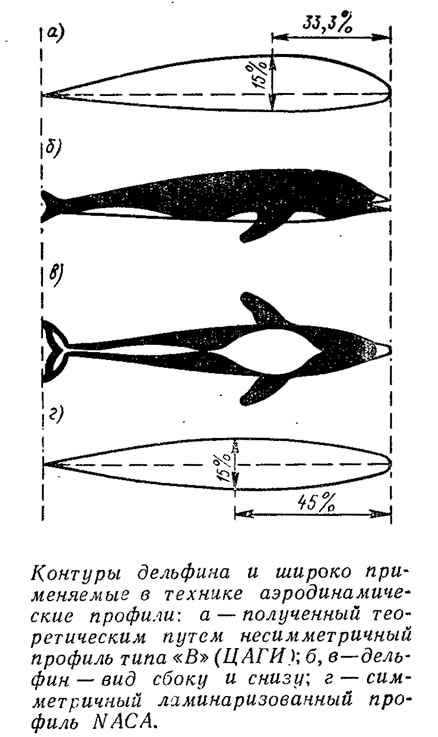
Например, в Японии было построено океанское судно «Куренаи Мару», корпусу которого придана форма тела кита, что позволило, сохранив проектную скорость судна, снизить мощность его двигателей на 15%. Изучение формы передней части тела дельфина подсказало авиаконструкторам наиболее выгодную форму носовой части фюзеляжа современных самолетов. Выяснилось, что при самолетных скоростях движения в воздухе и скоростях дельфина в воде числа Рейнольдса — безразмерные величины, характеризующие режим обтекания, — имеют один и тот же порядок (107—108). В США и Германии в поисках оптимальных форм фюзеляжей самолетов были тщательно исследованы формы различных рыб и млекопитающих. На основании полученных данных разработаны типовые серии так называемых ламинаризированных профилей NACA. Природа подсказала, что существует оптимальное, с точки зрения снижения сопротивления, соотношение длины и толщины летящего или плывущего тела. Обращает на себя внимание, что подсказанные изучением китообразных относительные толщины профилен (в пределах 20—28%) являются наивыгоднейшими и с позиций получения наиболее экономичных полезных объемов.
Изучение идеальных гидродинамических форм китообразных и акул (только в США такие работы ведутся в восьми крупных исследовательских центрах) послужило лишь началом ознакомления человека с тайнами их движения. Было выявлено, что мышцы живых организмов представляют собой очень экономичные и совершенные двигатели, КПД которых приближается к 90%, тогда как, например КПД двигателей внутреннего сгорания составляет всего лишь 35%. Однако даже при всем учете этой высокой эффективности природных двигателей — мышц ученые нередко сталкиваются с необъяснимым несоответствием имеющейся у морских животных «мощности» и развиваемой ими скорости. Например, еще в тридцатые годы английский зоолог Джеймс Грей обратил внимание на Необъяснимый феномен скорости дельфинов, способных в течение длительного времени кружить вокруг быстроходного судна, хотя даже при самой поверхностной оценке «мощности» их мышц для этого явно хватать не должно. Зоолог обратился к теории корабля и воспользовался общепринятой формулой, по которой судостроители определяют требующуюся мощность двигателя по заданной скорости движения и сопротивлению воды движению корпуса судна. Поскольку дельфины спокойно шли наравне с 20-узловым судном, Грей принял их скорость равной 20 уз. Считая коэффициент сопротивления тела дельфина равным аналогичному показателю наиболее быстроходных кораблей, Грей произвел подсчет мощности по скорости и сопротивлению и получил совершенно непонятный результат.
Вышло, что при скорости 20 уз дельфин должен производить работу, которая примерно в 10 раз превышает возможности его мускулов.
Естественно, возникает вопрос: а как же оценивались эти возможности? Ученые считали, что мышечная сила в пересчете на 1 кг веса мышц у всех китообразных одинакова (эта цифра уже была определена), а взвесить вес мышечного аппарата дельфина было уже несложно.
Это несоответствие, получившее название «парадокса Грея», не могло не заинтересовать ученых. Предположение, что работоспособность дельфина в 10 раз больше, чем у всех остальных китообразных, проверки не выдержало. А при буксировке чучел и моделей дельфинов выяснилось, что сопротивление их примерно совпадает с первоначальной оценкой ученых. Исследования зашли в тупик, многие годы парадокс Грея оставался в числе необъяснимых загадок природы.
Борьба авиаконструкторов и кораблестроителей за скорость в воздухе и в воде вынудила инженеров и ученых ряда стран вернуться к изучению феномена дельфина, как, впрочем и ряда других столь же непонятных явлений живой природы. Гидробноника получила первый мощный толчок.
Немецкий ученый в области ракетостроения М. Крамер (когда-то один из ведущих сотрудников фон Брауна) еще в 1938 г. предложил применять на движущихся в воде быстроходных объектах демпфирующее покрытие, «обладающее способностью поглощать энергию турбулентных пульсаций в пограничном слое жидкости». Практически это покрытие имитировало наружный волосяной (меховой) покров тюленей, морских львов и других подобных животных или оперение: на поверхности обтекаемого тела размещалось огромное количество тонких упругих проволочек, ориентированных вдоль набегающего потока. Благодаря силам трения между проволочками и жидкостью турбулентное обтекание, по идее Крамера, должно было превратиться в ламинарное, что существенно уменьшило бы сопротивление на высоких скоростях. Практического применения такой метод ламинаризации потока (или управления пограничным слоем) не нашел.
Тот же М. Крамер уже после войны плыл через Атлантику на пассажирском пароходе, и наблюдение за резвящимися дельфинами подсказало ему еще один путь решения той же задачи. «Я понял, — писал он позднее в книге «Гидродинамика дельфина» (1967 г., Нью-Йорк),— что дельфины могут помочь мне решить проблему сопротивления тел, движущихся в жидкой среде, — проблему, над которой я бился уже 15 лет». Крамер стал искать разгадку парадокса в резком снижении сопротивления живого дельфина, по сравнению с его же чучелом, за счет управления пограничным слоем жидкости при помощи гибкого и упругого кожного покрова.
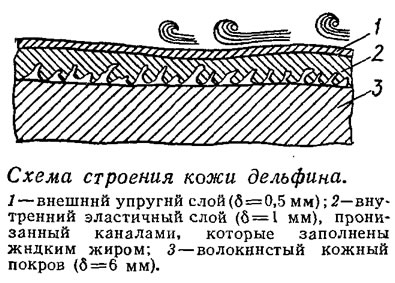
Тщательно изучив «обшивку» дельфина под микроскопом, М. Крамер установил, что она имеет очень сложную структуру. Внешний упругий слой толщиной около 0,5 мм опирается на упруго деформируемый внутренний слой толщиной 1 мм с каналами, заполненными жидким жиром. Этот слой прилегает к внутреннему мощному волокнистому кожному покрову, толщина которого достигает 6 мм. При движении дельфина возникают пульсации давлений в пограничном слое, которые передаются через слой 1 на эластичную прослойку 2 и деформируют ее перпендикулярно поверхности; она прогибается внутрь на всех участках увеличения наружного давления или выгибается наружу при разрежении. Вязкая жидкость, находящаяся между слоями 1 и 3, начинает перетекать по каналам в соответствии с деформацией слоя 7, демпфируя колебания наружного давления, в пограничном слое воды, этим поглощается энергия вихрей — исключается турбулизация.
Главную роль в снижении сопротивления, как заключил ученый, играет именно эта способность кожного покрова китообразных ламинаризировать пограничный слой обтекающей воды, т. е. обеспечивать обтекание корпуса без завихрений, неизбежно образующихся при испытании жестких моделей и чучел дельфинов.
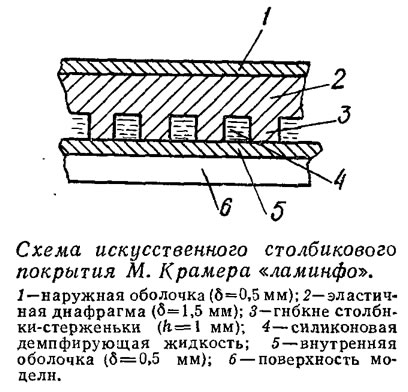
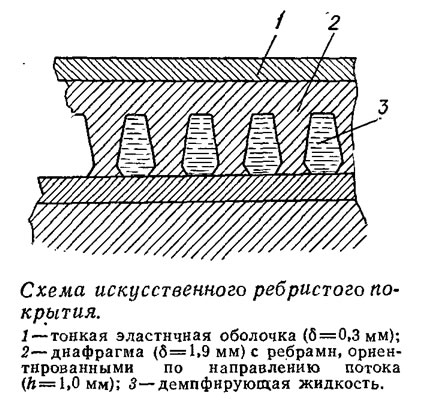
Представлялось очень заманчивым делом воспроизвести обнаруженное явление — разработать искусственное ламинаризирующее покрытие, применение которого помогло бы существенно повысить скорости движущихся в воде объектов. Разработанное М. Крамером покрытие из резины получило название «ламинфо» или искусственная дельфинья кожа. Что оно собой представляло? Наружная оболочка 1 опирается на эластичную диафрагму 2 с гибкими стерженьками — столбиками 3. Пространство между стерженьками заполняется силиконовой демпфирующей жидкостью 4. Слои покрытий 1 и 2 опираются на внутреннюю оболочку 5, которая наклеивается на поверхность модели 6. Толщина искусственной оболочки 3,5 мм. По некоторым данным применение покрытия Крамера на моделях небольших катеров обеспечивает снижение сопротивления на 50—60%.
В дальнейшем М. Крамер продолжал работы в этом направлении. Так, установив, что столбиковое покрытие теряет эффективность с течением времени, на двух улучшенных вариантах покрытия этот недостаток он уже устранил. На поверхности последних, усовершенствованных покрытий под воздействием турбулентностей возникают значительно меньшие складки, и следовательно, возможность отрыва потока, вызывающая увеличение сопротивления, менее вероятна; это обеспечивается тем, что ребристое покрытие состоит из диафрагмы, которую поддерживают ребра, ориентированные по направлению потока.

Исследования М. Крамера послужили толчком к разработке самых различных искусственных ламинаризирующих покрытий. Так, например, в США запатентовано сотовое покрытие для обтекателей гидролокатаров. Верхняя и нижняя оболочки выполненные из жесткого пластика, разделены относительно мягкой сотовой диафрагмой 2, которая и является демпфирующим слоем.
Таким образом, обнаружение эффекта ламинаризации пограничного слоя кожным покровом дельфина и изучение его «конструкции» послужило основой развития нового перспективного направления техники. Однако продолжающиеся работы по исследованию феномена дельфина давали все новые открытия. При участии того же М. Крамера Ф. Эсса-пианом было изучено явление образования на поверхности кожи дельфинов поперечных складок.
С помощью киносъемок были обнаружены и зафиксированы возникающие при движении на максимальных скоростях поперечные к набегающему потоку складки на нижней части туловища. На первый взгляд, такие складки вредны и должны только тормозить, поскольку общеизвестно, что любой выступ на корпусе обтекаемого тела увеличивает его сопротивление движению. Однако выяснилось, что эти поперечные складки не неподвижны: пробегая по телу дельфина, они образуют «бегущую волну», синхронную с возникающими завихрениями жидкости Поверхность тела дельфина как бы выскальзывает из-под агрессивных тормозящих вихрей, сопротивление движению не возрастает. Очевидно, руководит этим явлением центральная нервная система: датчики ее в виде нервных окончаний реагируют на резкие местные изменения давлений на поверхности тела и вызывают болевые ощущения, для уменьшения которых мышечные ткани и создают «бегущую волну».
Следовательно, кроме пассивной реакции кожного покрова на возникающие завихрения в пограничном слое, существует и активная реакция мышц — активное управление этим же пограничным слоем.
Любопытное ощущение испытываешь при поглаживании поверхности тела высунувшегося из воды дельфина. Если это делать нежно, то создается впечатление, что под рукой мягкая податливая и притом сухая поверхность. Последнее обстоятельство связано с водоотталкивающими свойствами кожного покрова, которые также имеют немаловажное значение, способствуя уменьшению сопротивления трения: частицы обтекающей жидкости проскальзывают, «не цепляясь» за наружный слой кожи. Если резко увеличить нажатие руки, то мгновенно ощущается сильное противодействие, — поверхность кожи становится жесткой, как хорошо накачанный футбольный мяч.
Ясно одно: природа подарила дельфинам (можно предполагать, что и другим китообразным) замечательные свойства кожи — реакцию на изменение давлений в прилегающих к ней областях жидкости, в результате которой осуществляется управляемая деформация поверхности тела, препятствующая росту сопротивления движению при повышении скорости.
Естественно, что искусственно полностью воспроизвести эти свойства кожи дельфина для применения на технических объектах очень сложно. Однако, если судить по данным зарубежной печати, даже частичное воспроизведение исследованного механизма уже дает положительные результаты.
Наконец, отечественными учеными С. В. Першиным, А. С. Соколовым и А. Г. Томилиным сделано еще одно открытие, внесенное Комитетом по делам изобретений и открытий при Совете Министров СССР в Государственный реестр. Оказалось, что в зависимости от режима плавания изменяется упругость плавников дельфина. При быстром плавании благодаря наполнению кровью сосудов упругость плавников наибольшая, при медленном — они расслаблены. Это управление упругостью плавников также способствует высокой скорости движения дельфинов.
Заканчивая разговор о новом направлении гидробионики, отметим, что изучение гидродинамики плавания морских животных дает исключительно ценный и поистине необъятный материал, помогающий инженерам найти новые возможности улучшения скоростных качеств технических объектов.
Примечания
1. Ленин В. И. Поли, собр. соч.. 5-е изд., г. 29, с. 152—153.