
Невольно возникает мысль о возможности автоматизации управления движением катера. На встрече участников нами был задан вопрос о перспективах применения на подобных гоночных машинах современной автоматики. Ответ руководителя команды Феретти, катер которой занял первое место, был краток: "Пробовали, не справляется". Что же такое типичный катер класса "Оффшор-1" именно как сложнейший в управлении комплекс, в котором использованы едва ли не все из известных катеростроителям достижений гидро- и аэродинамики? По просьбе редакции на этот вопрос отвечает наш постоянный автор кандидат технических наук Юрий Митрофанович Войнаровский (в недавнем прошлом — зам. главного конструктора ЦМКБ "Алмаз", один из участников проектирования патрульных катеров "Мангуст" и "Ястреб").
Высокие скорости на воде были достигнуты в гонках и при попытках установлений рекордов скорости в различных классах катеров.
Скорость, безопасность и устойчивость движения такого катера зависят от благоприятного взаимодействия их аэродинамических и гидродинамических характеристик под влиянием двух сред, плотность одной из которых в 800 раз больше, чем другой. Как только скорость увеличивается, катер начинает испытывать динамическое давление от воды, и чтобы установилось равновесие, смоченная площадь его корпуса уменьшается, как только он поднимается и начинает глиссировать.
Современные высокоскоростные катера имеют "туннельные" корпуса, содержащие соответствующим образом спрофилированные несущие поверхности, работающие в потоке воздуха и генерирующие аэродинамическую подъемную силу, что помогает катеру быстрее достигать режима глиссирования. Однако аэродинамические поверхности необязательно занимают точное положение. На практике гоночный катер часто двигается "на винте" в неустойчивом положении с высоко поднятой носовой частью. В этом случае изменения (колебания) гоночной высоты и угла отрыва связаны с относительным положением центров аэродинамической и гидродинамической подъемных сил: при этом запас продольной устойчивости близок к критическому. То же самое может одновременно произойти и с поперечной устойчивостью, особенно — при боковых порывах ветра. Положение центра давления меняется в зависимости от угла атаки (глиссирования) и высоты корпуса относительно воды.
Все перечисленные признаки и особенности движения особенно наглядно проявляются у гоночных катеров "открытого моря" — класса "Оффшор-1".
Класс "Оффшор-1" — мореходный высокоскоростной гоночный катер, имеющий ходовой вес до 5.5-6.0 т и способный двигаться на волнении высотой до 3.5 м. Специфические конструктивные особенности этих катеров подчинены основной задаче — поддержанию максимальной скорости (до 230 км/ч) с одновременным обеспечением курсовой, продольной и поперечной устойчивости и минимальным снижением скорости на волнении, а также в процессе прохождения поворотов на гоночной дистанции.

Внешние конструктивные признаки этих катеров и их функциональные особенности можно разделить на следующие группы элементов:
- 1. Корпус.
- 2. Движительно-рулевое устройство.
- 3. Средства активного управления движением.
Корпус
Это мореходный высокоскоростной глиссирующий катамаран туннельного типа с аэродинамической разгрузкой. Корпус условно можно разделить на три объемных части (рис. 1) — два несимметрично-килеватых бортовых спонсона и соединяющий их аэродинамически профилированный в продольном направлении мост, напоминающий профиль крыла самолета и установленный под определенным углом (около 5°) к линии киля.
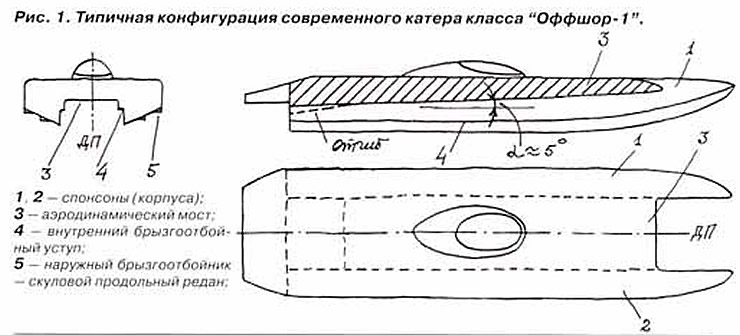
Внутренние плоскости спонсонов (параллельные диаметрали) и моста образуют при движении совместно с поверхностью воды сужающийся по высоте туннель, в котором возникает скоростной аэродинамический подпор, усиливающийся за счет экранного эффекта водной поверхности. Образующаяся аэродинамическая подъемная сила существенно компенсирует ходовой вес катера и может составлять на высоких скоростях до 50% гидродинамической подъемной силы, создаваемой корпусами спонсонов при глиссировании.
Таким образом, при имеющейся ходовой нагрузке с увеличением скорости движения происходит перераспределение компонентов подъемной силы (и сопротивления) в сторону увеличения ее аэродинамической составляющей. Это приводит к достижению достаточно высокого гидроаэродинамического качества корпуса (К = 4+4.5) = D/R на скоростях около 200 км/ч. Этот факт подтверждается ниже простым расчетным примером.

Характерной особенностью гоночных корпусов туннельного типа является отсутствие развала бортов. Другая особенность состоит в том. что передняя кромка аэродинамического моста смещена в корму по отношению к носовым оконечностям спонсонов. Это сделано для смещения центра аэродинамического давления в корму с целью повышения продольной устойчивости и более точного ее поддержания при движении. С этой же целью в ряде случаев делается геометрический отгиб нижней плоскости моста вниз в кормовой части (рис. 1).
Информация об изображении
Рис. 2. Схема расположения системы поперечных и продольных реданов на днище
Спонсоны имеют достаточно большой угол килеватости (около 15-20°) и, как правило, по два поперечных естественно вентилируемых редана, передний из которых расположен вблизи миделя. Воздух, подсасываемый реданами сбоку в момент их контакта с водой, при очень высоких скоростях успевает проявлять эффект сжимаемости и поэтому выполняет роль воздушной смазки, снижающей трение и одновременно передающей несущее гидродинамическое давление на корпус. Кроме того, днищевые поверхности спонсонов имеют скуловые брызгоотбойники и один продольный редан, секционированный по длине на три части, расположенные между поперечными реданами. По мере смещения в корму указанные части продольного редана располагаются ближе к борту, что соответствует увеличению ширины смоченной поверхности днища по направлению к транцу при глиссировании корпуса и его приводнении после подлетов. Схема расположения реданов показана в плане на рис. 2.
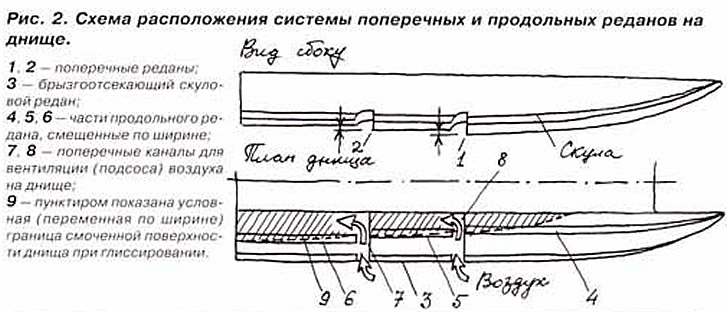
Рис. 2. Схема расположения системы поперечных и продольных реданов на днище
Принцип установки частей продольного редана по ширине днища таков, что продолжение наружной кромки редана, расположенного "носовее", является внутренней кромкой редана, расположенного в корму от него. Изменяется также и высота расположения реданов — уступом, с подъемом каждой следующей в корму части относительно носовой.
Следует отметить, что для отсекания брызговой пелены с внутренних стенок спонсонов, параллельных диаметрали, последние имеют по ширине уступ, простирающийся по всей длине спонсона (рис. 1).

В качестве материала корпуса используются современные высокопрочные материалы (алюминий, углепластик и т.д.). Применение углепластика позволяет изготавливать корпус методом формования, что помимо соображений жесткости и прочности дает большие возможности для получения форм, наиболее совершенных в аэродинамическом отношении, чему придается сейчас исключительно важное значение.
Килеватые корпуса катамаранного типа с туннельными образованиями обладают мягкостью хода на волнении в большом диапазоне скоростей, что можно объяснить следующими факторами:
- разнесенной по ширине килеватостью, что позволяет снизить и рассредоточить пики ударных нагрузок в моменты приводнения корпуса при подлетах (в т.ч. за счет несимметрии килеватости на спонсоне);
- влиянием аэродинамической подушки (упругой сжимаемостью воздуха при экранном эффекте), в том числе и при вентиляции днища от поперечных реданов.
Соотношение длины и ширины корпуса катеров рассматриваемого класса находится в достаточно жестких пределах. При L = 13+15 м и B = 3.4+3.7 м отношение L/B в среднем составляет 3.65+4.3. Относительно большое удлинение корпуса позволяет достаточно точно поддерживать продольную устойчивость движения при ручном управлении движением — в моменты скачков ходового дифферента. когда резко изменяются величины и смещаются по длине точки приложения аэродинамической и гидродинамической подъемных сил. При этом следует отметить. что центр тяжести (ЦТ) катера, оснащенного для гонки, находится на расстоянии 22-25% длины "носовее" транца, т.е. присутствует резко выраженная кормовая центровка.
Следует отметить, что вследствие значительного повышения скоростей движения немаловажное значение стал иметь фактор аэродинамического сопротивления. В связи с этим последние модели катеров "Оффшор-1" имеют достаточно совершенные ("зализанные") аэродинамические формы, обеспечивающие значение коэффициента сопротивления С около 0.2 (для катера чемпионов "Victory").
Движительно-рулевое устройство
В настоящее время в качестве движителей применяются только полупогруженные гребные винты (ППГВ), обладающие возможностью надежной работы в нестационарном режиме с высоким КПД и позволяющие практически исключить влияние относящихся к ним выступающих частей, создающих гидродинамическое сопротивление (т.е. гребных валов и поддерживающих кронштейнов, в данном случае не пересекающих поверхность воды). Отличительной особенностью ППГВ является возникновение на нем значительной вертикальной силы, направленной вверх, и боковой силы, требующей уравновешивания в поперечной плоскости на прямом курсе, что обычно достигается установкой двух винтов противоположного вращения.
Вертикальная составляющая включается в состав динамической силы поддержания. а поперечная — используется в технике поворотов. С этой целью винты имеют направление вращения внутрь — попасти в верхнем положении движутся навстречу друг другу.

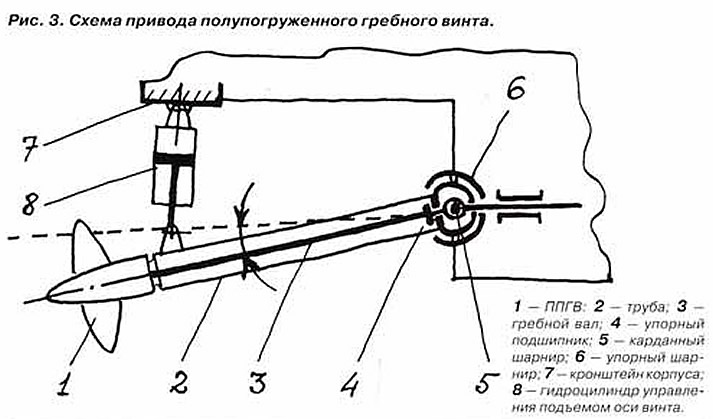
Использование ППГВ на гоночных катерах привело к существенному расширению границы достижимых скоростей. Ось ППГВ в рабочем положении практически расположена в плоскости днища или даже несколько выше. В качестве трансмиссии для ППГВ используются шарнирно закрепленные на транце гребные валы, позволяющие изменять положение ППГВ по высоте под действием вертикального гидроцилиндра, выполняющего одновременно функции поддерживающего кронштейна. Упор передается через трубу гребного вала на шаровой упорный шарнир в транце, а гребной вал шарнирно соединен с двигателем и передает только крутящий момент. Диаметр кожуха и трубы гребного вала не имеет существенного значения, поскольку вал вместе со ступицей винта при глиссировании корпуса практически находится 8 воздухе — скользя по поверхности воды. Такая конструкция привода обеспечивает следующие преимущества:
- дает возможность как можно дальше вынести ППГВ за транец — выдвинуть его из зоны возмущенного потока воды за транцем;
- позволяет регулировать положение ППГВ относительно корпуса и водной поверхности по высоте;
- одновременно изменять угол наклона гребного вала с винтом в вертикальной плоскости, влияя при этом на направление и величину вектора тяги;
- включить ступицу ППГВ с кронштейном и трубой гребного вала в число элементов глиссирования, т.е. создавать дополнительную гидродинамическую силу поддержания, смещенную за транец;
- обеспечить механическую простоту, надежность, компактность и малый вес привода.
Недостатком ППГВ с наклонным валом является необходимость установки отдельного рулевого устройства, хотя сам факт его независимого присутствия и широкие возможности для конструктивной компоновки с целью повышения эффективности управления имеют свои преимущества. В первую очередь, это касается продольной базы установки пера руля относительно ЦТ катера. Чем дальше перо руля вынесено за транец, тем больший момент для вращения корпуса в горизонтальной плоскости от перекладки руля можно создать; либо при заданном моменте можно уменьшить площадь пера руля и тем самым снизить его гидродинамическое сопротивление. Кроме того, перо руля, вынесенное достаточно далеко в корму от ЦТ катера способствует автостабилизации движения на прямом курсе, особенно при отрывах корпуса от воды при движении на волнении. когда перо руля остается в воде.
На приводимых фотографиях видно, что перья рулей действительно вынесены достаточно далеко за транец и с этой целью устанавливаются на специальных консольных кронштейнах. Иногда устанавливается один изолированный руль большой площади, расположенный в диаметрали. Иногда применяются два пера руля, располагаемых симметрично позади гребных винтов. При такой компоновке рули имеют отдельные синхронные гидроприводы. Рули имеют клиновидный профиль с тупой выходящей кромкой, что создает режим естественной вентиляции и уменьшает сопротивление руля на высокой скорости. Кроме того, такой профиль руля позволяет обеспечить его достаточную жесткость и прочность на изгиб и кручение.
Альтернативным приводом ППГВ являются традиционные поворотно-откидные колонки (ПОК) "Меркруйзер", используемые одновременно 8 качестве рулевого устройства. Преимуществом ПОК является возможность изменения угла наклона оси ППГВ в обе стороны от горизонтального положения, что важно в процессе прохождения поворотов дистанции. Как правило, в режиме управления курсом ПОК работают синхронно, для чего их связывают шарнирно поперечной траверсой.
Традиционными недостатками ПОК являются их более низкий механический КПД и конструктивная сложность, снижающая надежность эксплуатации.
По высоте относительно корпуса ПОК устанавливают таким образом, чтобы ось винта располагалась приблизительно в плоскости днища спонсона. Рулевой киль колонки закреплен на нижней части ступицы и одновременно выполняет функции защитного кронштейна, находящегося перед гребным винтом.
Средства активного управления движением
Режимы движения любого скоростного гоночного катера включают следующие фазы:
- 1. Разгон с ускорением при выходе на глиссирование;
- 2. Движение с максимальной скоростью на прямолинейных участках дистанции;
- 3. Прохождение поворотов с изменением курса до 180°.
Для оптимального управления катером на этих режимах (помимо рулевого устройства и дроссельной заслонки) используются следующие активные элементы с регулируемыми характеристиками:
- 1. Гидроцилиндры кронштейна ППГВ, шарнирно связанные с трубой наклоняемого в вертикальной плоскости гребного вала для изменения угла установки гребного вала и положения ППГВ по высоте относительно корпуса и поверхности воды (рис. 3);
- 2. ПОК с регулируемым относительно корпуса наклоном в вертикальной плоскости — также с целью изменения угла наклона гребного вала (недостатком ПОК в этом отношении является невозможность существенного отклонения ППГВ по высоте);
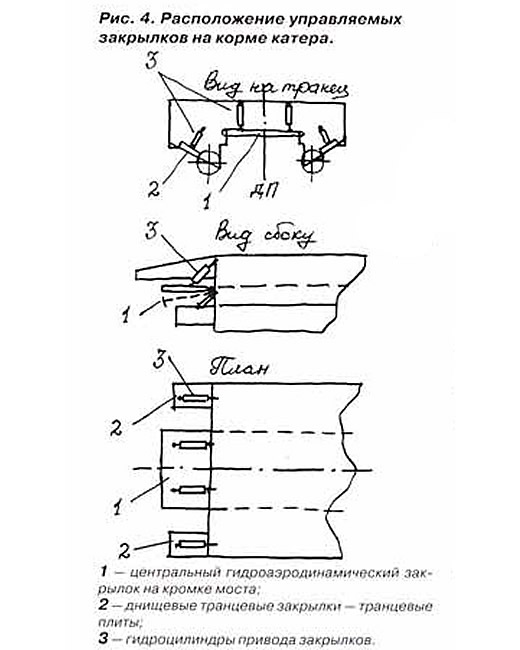
- 3. Центральный (туннельный) гидроаэродинамический закрылок большой площади, установленный между спонсонами и являющийся продолжением верхнего свода туннеля (рис. 4);
- 4. Боковые транцевые плиты на днище спонсонов, установленные выше основного продольного редана.
Привод перечисленных устройств осуществляется гидроцилиндрами (рис. 4).
Перечисленные устройства используются следующим образом:
Разгон
Вследствие кормовой центровки и соответствующего распределения гидродинамических сил, центр давления которых в этот момент расположен впереди ЦТ катера (аэродинамические силы еще слишком малы), катер приобретает большой дифферент на корму, гребной винт и все закрылки полностью погружены, сопротивление движению достаточно велико. Для ускорения разгона необходимо оптимально загрузить двигатель и приподнять корму для уменьшения кормового дифферента, что можно реализовать одновременной перекладкой вниз всех закрылков и гребного вала, если позволяет мощность двигателя. При этом центральный закрылок, имеющий большую площадь, работает в гидродинамическом режиме, поскольку верхний свод туннеля возле транца находится в воде. Опускание гребного вала вниз дает составляющую упора, направленную вверх. Одновременная работа всех перечисленных элементов результируется в суммарную подъемную силу, расположенную позади транца, что облегчает и ускоряет стартовый разгон.

Основной режим движения
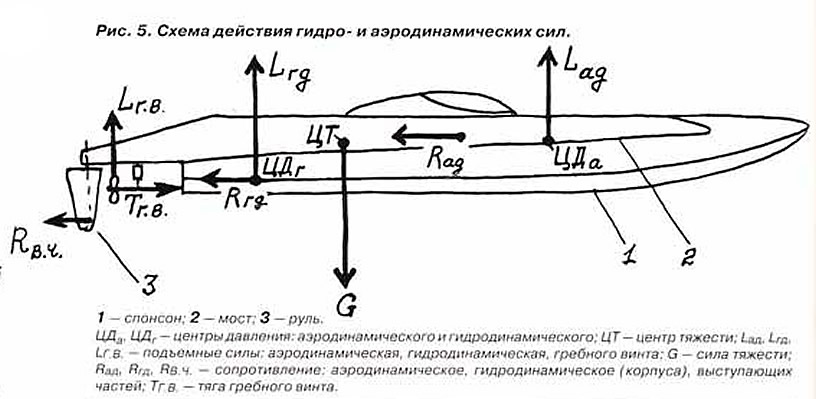
Силы, действующие на катер при прямолинейном движении, и их продольное распределение показаны на рис. 5. В случае подлета носовой части корпуса (например, от контакта с волной) резко возрастает аэродинамическая сила поддержания; результирующая несущая сила также возрастает и смещается в нос, провоцируя переворот катера через транец вверх.
В этот момент можно предпринять следующие действия:
- 1. Опустить цен тральный закрылок (работающий теперь в аэродинамическом режиме), создав тем самым дополнительный подпор в задней части туннеля;
- 2. Опустить гребной вал вниз (или поменять его наклон — в случае ПОК), получив тем самым вертикальную составляющую упора, направленную вверх.
В результате возникнет баланс стабилизирующих сил в кормовой части. Иногда при этом снижают обороты двигателя, чтобы снизить скорость и прекратить подлет. Днищевые закрылки при прямолинейном движении следуют над водой и могут использоваться, если катер в процессе подлета получает большой крен, что маловероятно.

Сохранение продольной устойчивости движения является главной задачей на прямолинейном участке движения, являющейся предметом искусства ручного управления. При уходе носовой оконечности вниз от горизонтальной траектории может однозначно возникнуть аварийная ситуация (сильный удар, поломка корпуса или уход его под впереди идущую волну — на практике известны и такие случаи).
Прохождение поворотов
Техника поворотов должна обеспечивать минимально возможный радиус разворота при минимально возможном снижении скорости и сохранении поперечной устойчивости движения без зарывания корпуса в воду. Резкий разворот без опрокидывания достигается одновременной перекладкой руля, подъемом внутреннего днищевого закрылка и гребного вала ППГВ и перекладкой вниз наружного закрылка и гребного вала. В результате возникают силы, притапливающие в корме внутренний спонсон и поднимающие наружный; при этом спонсоны "подрезают" водную поверхность в носовой части при сбросе скорости, что в итоге приводит к резкому развороту без опрокидывания наружу.
Техника поворота достаточно сложна и может несколько различаться в зависимости от типа применяемого движитель-но-рулевого комплекса.
Несколько слов об гидроаэродинамическом качестве катеров класса "Оффшор-1", о чем упоминалось в начале статьи.
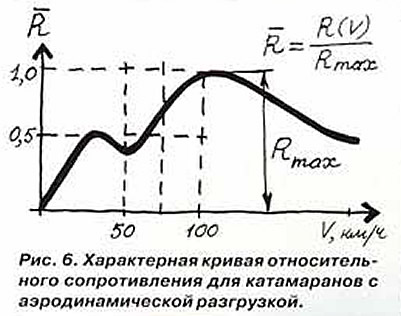
В начальных фазах движения (где-то до скорости 75 км/ч) кривая сопротивления близка к обычной для глиссирующих корпусов и имеет горб сопротивления (рис. 6). Однако при достижении скоростей порядка 100 км/ч начинает заметно проявляться эффект аэродинамической разгрузки, приводя к перераспределению сил сопротивления в общем балансе. В результате при дальнейшем росте скорости суммарное сопротивление движению начинает уменьшаться.
Гидроаэродинамическое качество К корпуса можно в первом приближении оценить по формуле:
где Δ — ходовой вес катера, кг; V — скорость хода, м/с; N — мощность двигателей, л.с.; η — пропульсивный КПД движителя.
Если принять Δ = 5800, V = 60 (216 км/ч), N = 2x900 = 1800 и q = 0.6, получаем К = 4.3, при этом суммарное сопротивление движению R составляет всего 1350 кгс.
Таким образом, конструктивная компоновка катеров класса "Оффшор* 1" по всем аспектам является достаточно эффективной и по этой причине пока не имеет альтернативных предложений.