
В настоящее время водометные движители (ВД) получили широкое распространение на быстроходных судах в основном благодаря высокому пропульсивному КПД, полученному, прежде всего за счет отсутствия выступающих частей при расположении водоприемного отверстия ВД в плоскости днища.
Однако проектирование высокоэффективного ВД для выбранной формы корпуса представляет определенные трудности, поскольку необходимо оптимизировать параметры ВД в комплексе с массогабаритными и эксплуатационно-экономическими показателями судна [1, 2], а также с учетом факторов взаимодействия с корпусом [3] и индуктивных эффектов в канале водозаборника [4].
Возможность изготовления ВД в одном агрегате, содержащем все компоненты для обеспечения тяги и маневрирования, привела к развитию серийного производства ВД, приспособленных к различным мощностям и скоростным режимам.
Обычно лопастные системы (ЛС) таких ВД проектируются для определенной оперативной точки, соответствующей максимальному пропульсивному КПД на заданной скорости хода. С целью увеличения области использования ВД каждого типоразмера их производители стремятся максимизировать КПД в широком диапазоне скоростей и тяг для возможности перехода от одной формы корпуса к другой, независимо от полной оптимизации проекта судна.
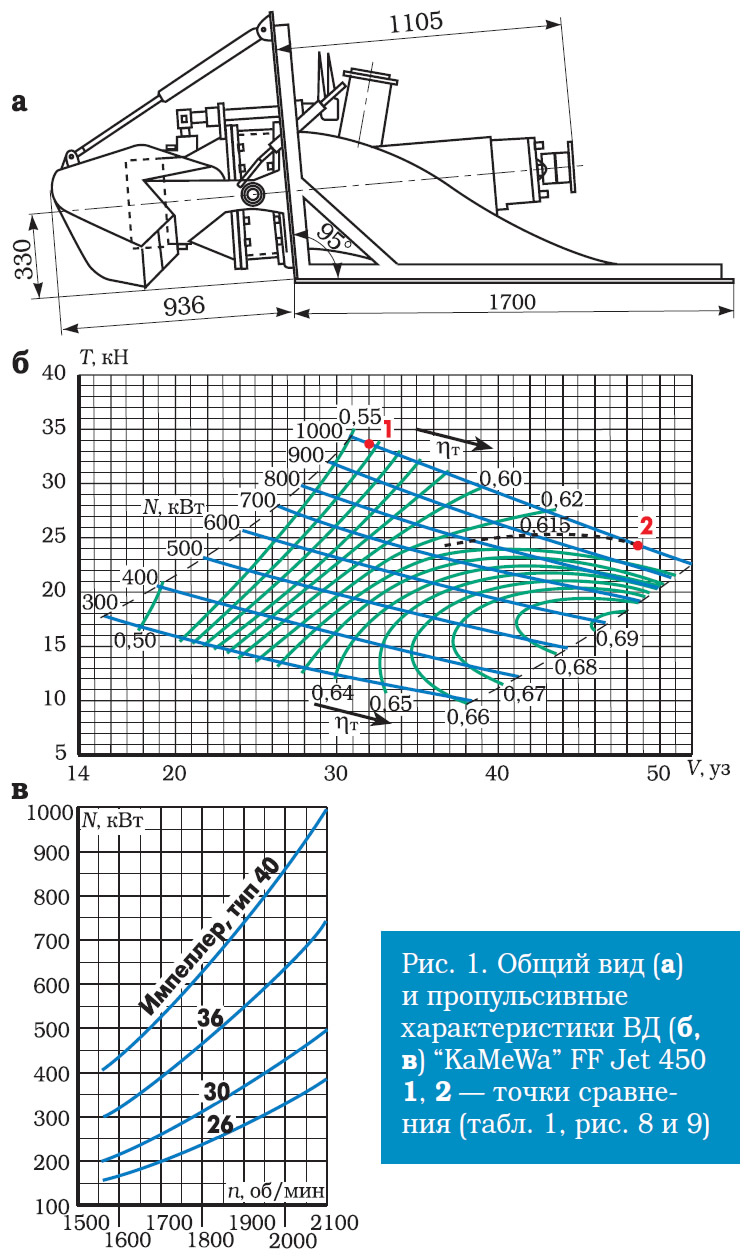
В качестве примера на рис. 1, а-в приведены тяговые характеристики ВД "KaMeWa" FF Jet 450 [5] с изопропульсивными кривыми, дающими наглядное представление о диапазоне значений его КПД и располагаемой тяги в зависимости от скорости хода и потребляемой мощности.
Предварительную оптимизацию проектных характеристик ВД или подбор и анализ параметров серийного образца можно выполнить, приняв в качестве исходного показателя максимальный КПД струи.
Расчет максимума КПД струи
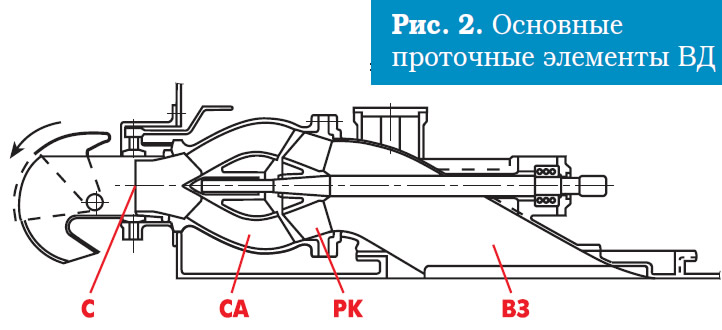
Как известно, проточная часть ВД состоит из трех гидродинамически сбалансированных конструктивных частей: водозаборника (ВЗ), ЛС, содержащей рабочее колесо (РК) со спрямляющим аппаратом (СА) и сопла (С), формирующего выходную струю с заданной скоростью выброса Vj (рис. 2).
Рабочие характеристики перечисленных элементов при выбранном геометрическом типе ВЗ и потребляемой мощности двигателя N (л.с.) связаны с величиной полной тяги Т (кгс), скоростью хода V0 (м/с) и частотой вращения РК nc (об/с).
При этом КПД полной тяги ВД ηт (рис. 1, б) при указанных ниже размерностях величин выражается следующими соотношениями [6]:

в которых T=ρQV0(

ηm — механический КПД трансмиссии; γ — удельный вес воды, кгс/м3; g = 9.81 — ускорение силы тяжести, м/с2.
Пренебрегая высотой подъема струи над уровнем воды, КПД струи можно определить из уравнения баланса напора в водопроточном тракте ВД:

Информация об изображении
Рис. 3. Коэффициенты гидравлических потерь днищевых ВЗ с различной геометрией входа
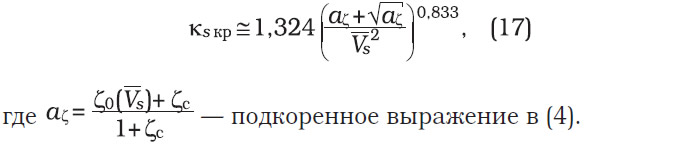
где 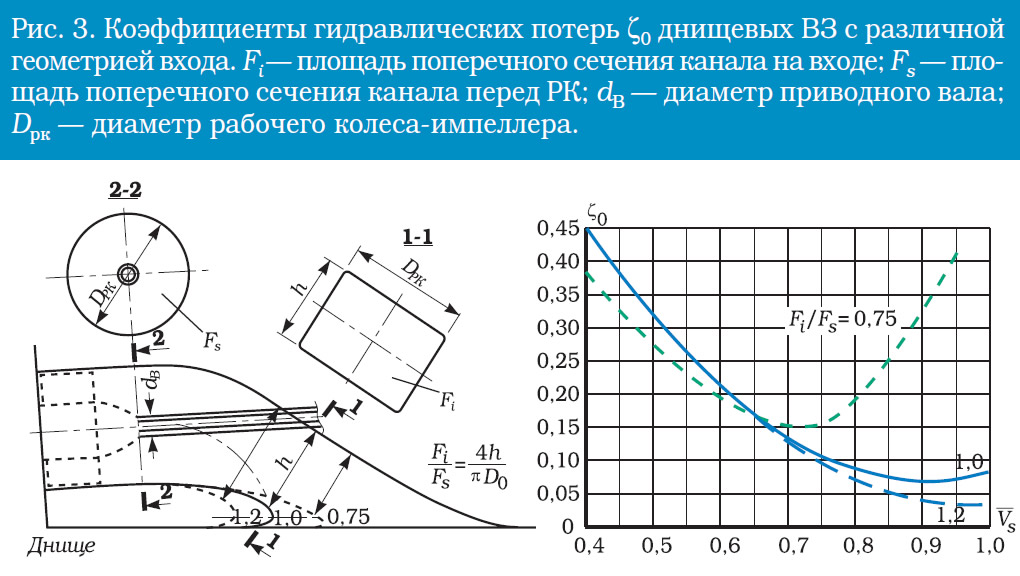
Рис. 3. Коэффициенты гидравлических потерь днищевых ВЗ с различной геометрией входа
На рис. 3 приведены экспериментальные кривые ζ0(
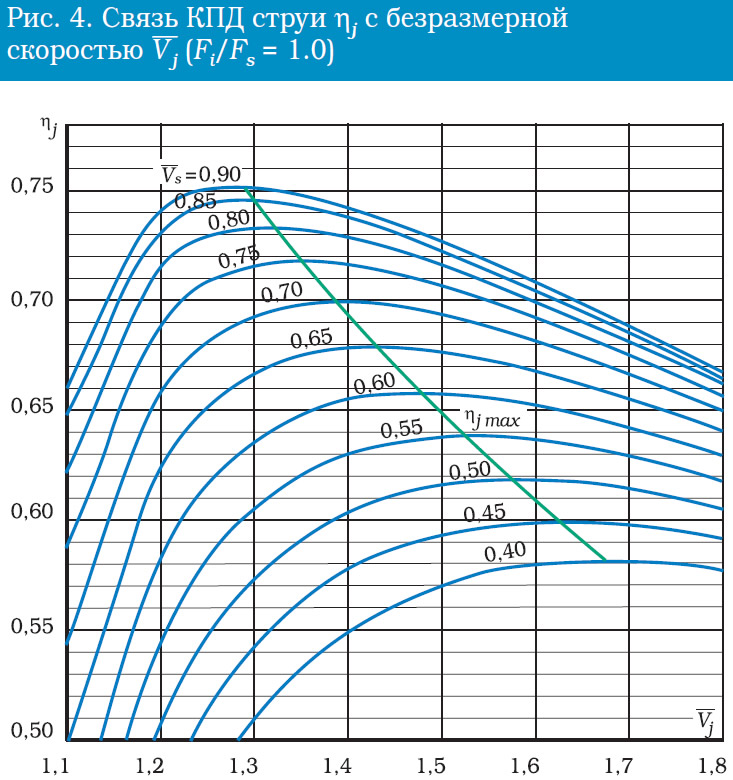
На рис. 4 показаны расчетные зависимости ηj от
Каждая из кривых на рис. 4 имеет свой максимум, положение которого зависит от значений ζ0 и
Поскольку значения ηp и ηm в (1) практически узко ограничены, а ηj изменяется в широком диапазоне, оптимизировать рабочие параметры ВД можно аналитически для каждой точки с максимальным КПД струи ηj, используя формулу (2) и кривую гидравлических потерь применяемого ВЗ (см. рис. 3).
В этом случае ηj max определяется из решения системы двух уравнений, представленной функцией (2) и ее первой производной, приравниваемой к нулю:
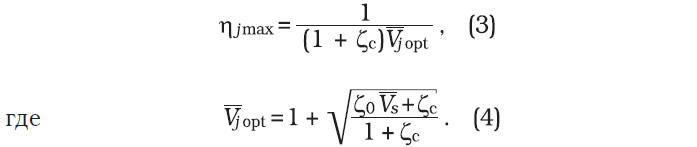
Линия ηj max, проведенная на рис. 4, соответствует уравнению (3) при вариации ζ0 в (4).
Приведенный диаметр канала ВЗ перед РК
На основе формул (1) и (3) легко рассчитать оптимальный напор и расход для заданной тяги (м вод.ст.) и скорости хода (м3/с):
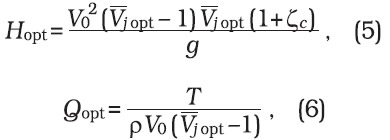
где ρ — массовая плотность воды, (кгс·с2)/м4; ρ = 102, γ = 1000 — пресная вода.
Приравнивая Qopt=VsFs=Vs(πD02/4) к Qopt из (6), находим приведенный диаметр D0 "живого" сечения потока перед РК, используемый далее в качестве базового размера ВД:

где
Как будет показано ниже, величина V0 имеет определенные ограничения, связанные с величиной гидравлических потерь в ВЗ и кавитационной устойчивостью РК.
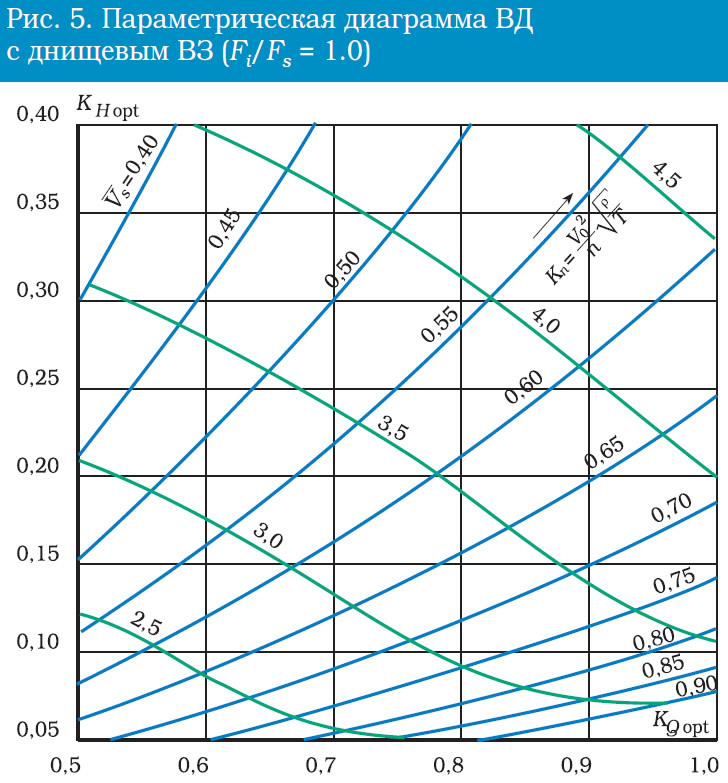
Построение параметрической диаграммы
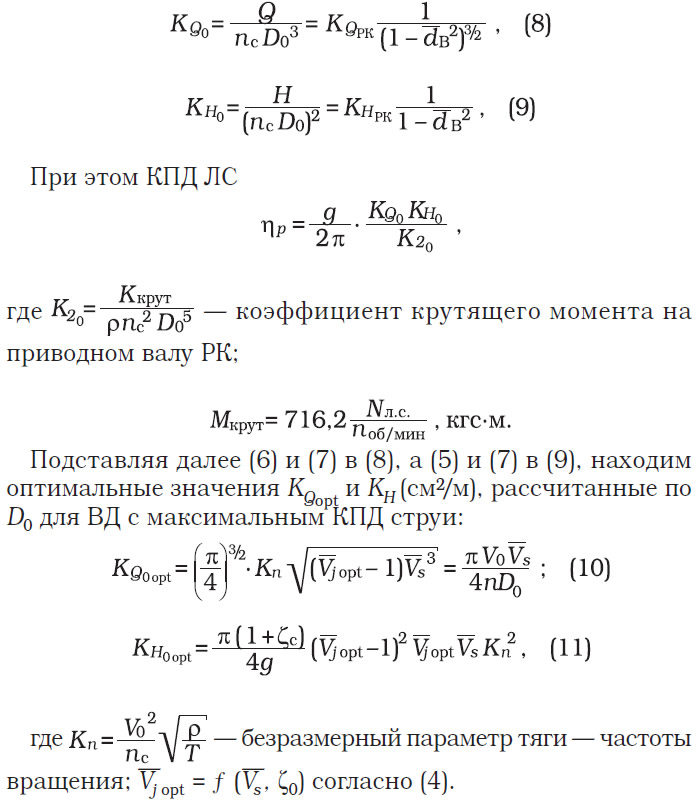
Диаметр D0 можно связать с расходно-напорными характеристиками и частотой вращения nc (об/с) РК через коэффициенты расхода и напора (1/g), используемые при испытаниях насосов:
Из условия постоянства расхода находим оптимальный диаметр струи за срезом сопла
Формулы (10) и (11) совмещаются графически в виде параметрической диаграммы, построенной в осях KQ0opt и KH0opt для ряда постоянных значений Kn и

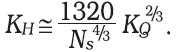
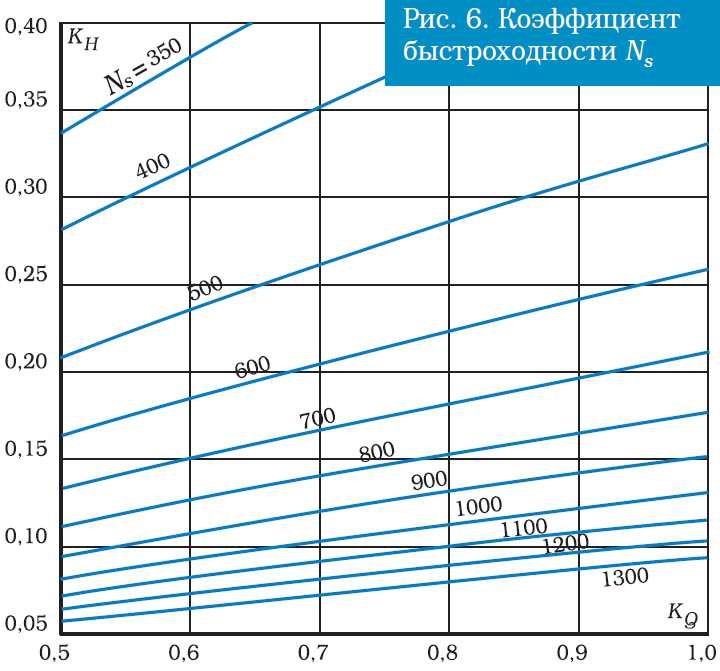
Учет коэффициента быстроходности
На полученную диаграмму можно нанести линии постоянных значений коэффициента быстроходности Ns (рис. 6), характеризующего, как известно, конструктивный тип РК (центробежное, диагональное или осевое), форму его проточной части, в зависимости от соотношения между расходом и напором ЛС ВД:
Кавитационные ограничения
Особое значение при проектировании ВД и его РК имеет оценка критического числа кавитации кs кр в потоке на выходе из ВЗ, соответствующего началу срыва напорной характеристики РК, а также предельной по кавитации скорости хода для применяемого типа ВЗ и РК.
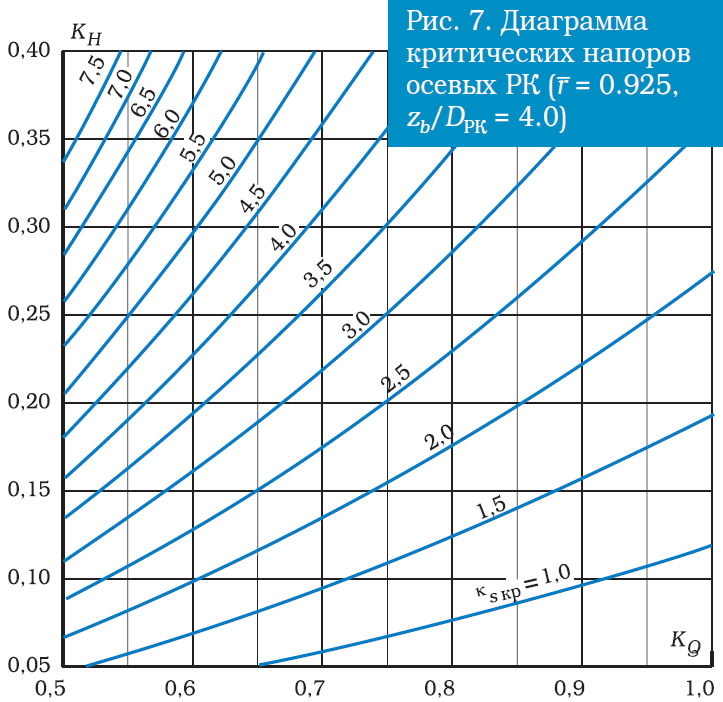
Для оценки кавитационных качеств осевых РК можно воспользоваться диаграммой критических напоров [6], построенной на основе серийных испытаний осевых насосов и гребных винтов в трубе (рис. 7). Кривые на диаграмме аппроксимируются эмпирической формулой

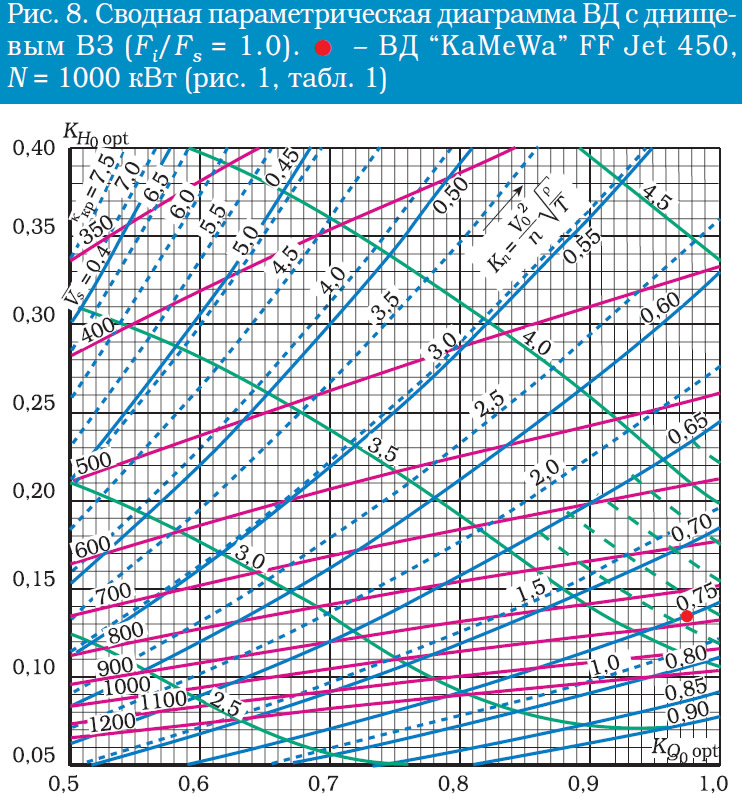
В итоге графики на рис. 4-6 можно свести в сводную параметрическую диаграмму ВД, имеющую максимальный КПД струи (рис. 8).
Оценка достижимой скорости хода
При расчете ВД необходимо, с одной стороны, определить расчетную скорость V0, достижимую при заданных энергетических и пропульсивных характеристиках в сочетании с выбранными значениями n и Kn:

С другой стороны, эта скорость не может превышать предельную скорость V0, ограниченную условием равенства числа кавитации кs в потоке на выходе из ВЗ и критического числа кавитации кs кр, предшествующего срыву напорной характеристики РК:

Для осевых РК, применяемых в составе ВД, кs кр можно определить, приравнивая (13) и (14) через отношение KH/KQ2:
Зависимости V0 пред от
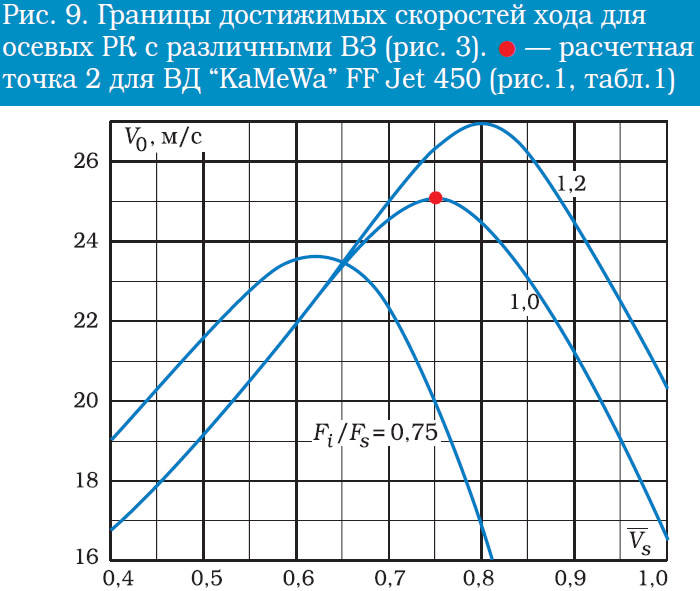
Общая точка пересечения кривых на рис. 9 при Vs≅0.65 соответствует точке при равных ζ0 на кривых рис. 3. Чем ниже ζ0, тем выше предельная скорость хода.
Применение параметрической диаграммы
Построенная параметрическая диаграмма позволяет:
- установить границы или точку оптимального использования ЛС с известными характеристиками в комплексе с применяемым типом ВЗ;
- определить конструктивный тип РК по Ns и спроектировать РК для оптимальных параметров, установленных с ее помощью в заданной точке;
- найти оптимальное сочетание N и n при заданных Т, V0 и Kn;
- оценить критические числа кавитации осевых РК и пределы достижимой скорости хода для используемого типа ВЗ;
- произвести расчетный анализ параметров натурного ВД при максимальном КПД струи;
- определить необходимую форму кривой гидравлических потерь ВЗ и его конструктивный тип применительно к заданным характеристикам используемого РК.
Проектировочный расчет ВД
Информация об изображении
Рис. 10. Совмещение характеристик 4-лопастных серийных РК с параметрической диаграммой
Пример совмещения области максимальных КПД серии четырехлопастных осевых РК [6] с параметрической диаграммой (см. рис. 8) представлен на рис. 10, где для последующего расчета выбрано РК с H/D = 1.15, расходно-напорная кривая которого пересекает зону максимальных np указанной серии РК.
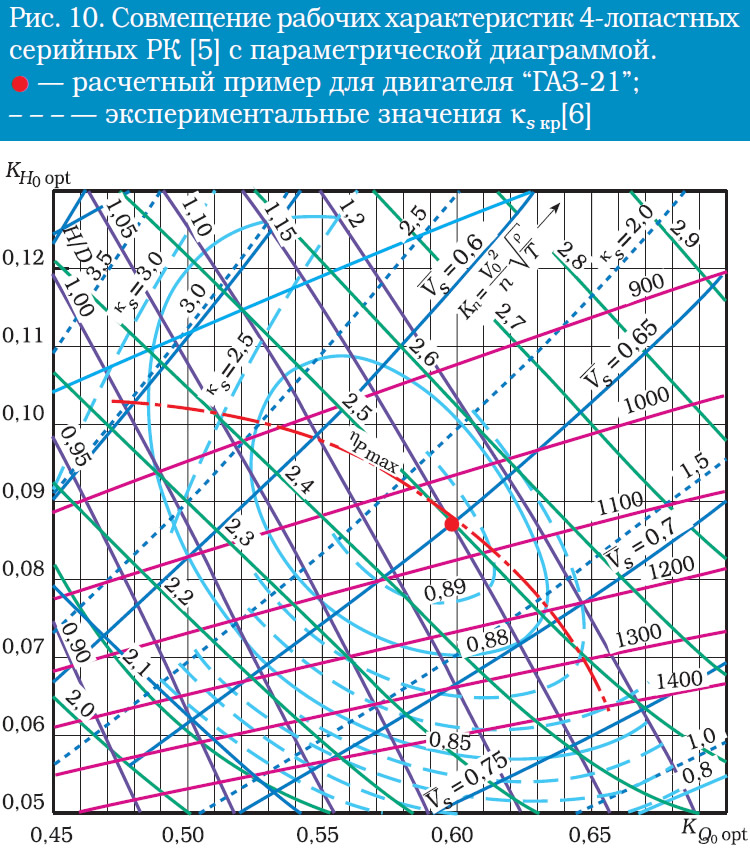
Рис. 10. Совмещение характеристик 4-лопастных серийных РК с параметрической диаграммой
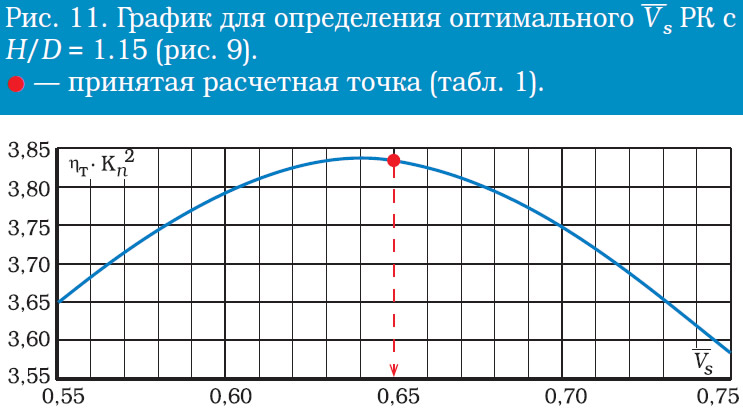
Из (15) видно, что при постоянных N и n максимум расчетной скорости достигается при наибольшей величине произведения nT·Kn2 , которое является переменным в зависимости от положения расчетной точки на выбранной рабочей характеристике. Зависимость этого параметра от
Рассчитаем далее характеристики ВД (с ВЗ при Fi/Fs=1.0 — см. рис. 3), работающего совместно с двигателем "ГАЗ-21", опыт применения которого на малых глиссирующих катерах достаточно известен. Результаты вычислений приведены в табл. 1.
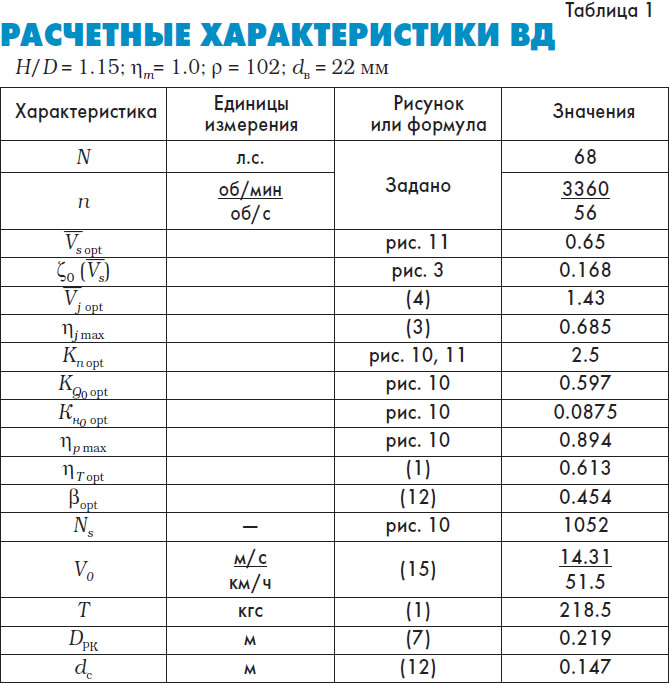
Найденные значения Dрк и dc практически совпадают с величинами, полученными на практике методом подбора для ряда проектов катеров, имевших такой же двигатель [7].
Далее из расчетной величины Т следует выделить сопротивление голого корпуса ЯRгк (на тихой воде или заданном волнении) путем вычета сопротивления выступающих частей и аэродинамической составляющей.
Для получения Rгк и V0 одним из известных методов определяется допустимый ходовой вес катера и оптимальная ширина глиссирования с заданной продольной центровкой xg и выбранным углом килеватости βк корпуса. Последний таким образом будет сбалансирован с ВД.
Поверочный расчет ВД
На основе представленных графиков можно выполнить расчетный анализ рабочих характеристик натурного ВД с ВЗ, близким по конфигурации к варианту показанному на рис. 3.
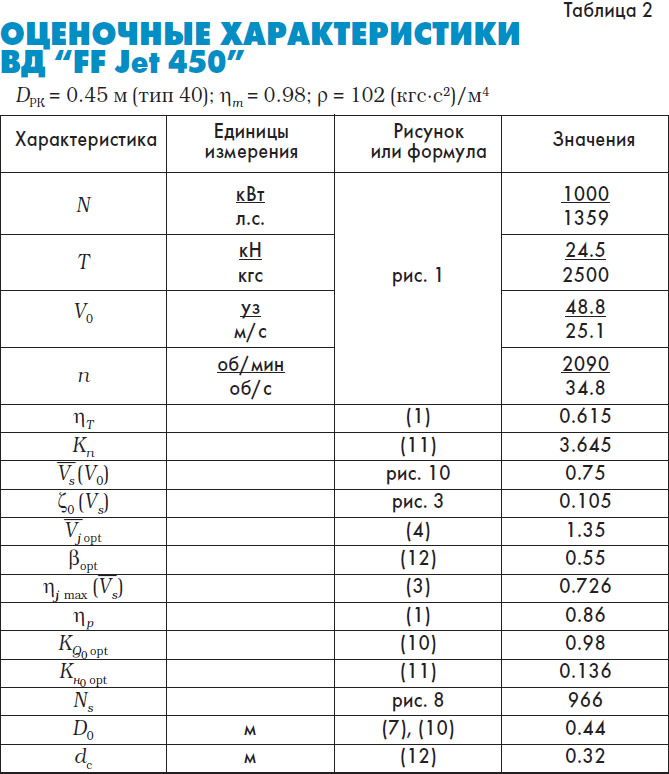
В качестве примера принят ВД "KaMeWa" FF Jet 450 [5], характеристики которого приведены на рис. 1. Указанный ВД имеет набор сменных осевых РК диаметром 0.45 м, предназначенных для различной мощности и частоты вращения.
Полагая, что ВЗ указанного ВД близок по геометрии и гидравлическому сопротивлению к имеющемуся прототипу (см. рис. 3, Fi/Fs=1.0), на основе рис. 1, 3 и 8, 9 в табл. 2 рассчитаны оптимизированные характеристики ВД для режима полного хода при мощности N=1000 кВт. Выбранная точка 2 на рис. 1 расположена вблизи правой границы предельных скоростей и тяг; соответствующей началу 2-й стадии кавитации РК (см. рис. 10).
Согласно (7),
Действие ВД на переходном режиме (индекс 1). Безразмерную скорость
Снижение ηp и кs (по сравнению с режимом полного хода) свидетельствует о том, что рабочая точка смещается вверх по расходно-напорной кривой РК в сторону ударного входа на лопастном профиле РК, что может вызвать 2-ю стадию кавитации и срыв тяговой характеристики (точки Т1 и V01 на рис. 1 находятся вблизи левой границы располагаемой тяги). Сравнение положения точек —
Заключение
Анализ полученных результатов позволяет сделать следующие выводы:
1. Параметрическая диаграмма, построенная в предлагаемой форме, дает возможность подобрать оптимальное сочетание характеристик ВЗ и ЛС (РК) с целью получения максимальных значений пропульсивного КПД и скорости хода.
2. В случае необходимости учета других проектных показателей, связанных с увеличением нагрузки на движитель, область оптимизации ВД может быть расширена за счет увеличения поджатия сопла.
3. При использовании осевых РК совместно с днищевыми ВЗ статического типа существует максимум достижимой скорости хода, который зависит от формы кривой гидравлических потерь применяемого ВЗ.
Полученные расчетные соотношения и представленные графики применимы для оценки характеристик движения быстроходных судов и маломерных катеров с ВД, а также для подбора и анализа параметров серийных ВД при заданной кривой буксировочного сопротивления.
Литература
- 1. Wang G. S., BarhamH. L. Some aspects ofwater-jet optimization SAE Preps, S. A. № 740282, New York, 1974.
- 2. Allison J. L, Goubault P. Water-jet Propulsion for Fast Craft — Optimized Integration of Hull and Propulsor. — Proceeding of the Second International Conference on Fast Sea Transportation (FAST'93). — Vol. 1., Yokohama, Japan, 13-16 December 1993.
- 3. Svensson R. (KaMeWa AB) Water-jet Propulsion of high-speed Craft. — IMAS 91. High speed Marine Transportation, 11-13 November 1991.
- 4. Ocamoto Y, Sugioka H., Kitamura Y. On the pressure Distribution of Water Jet Intake Duct in Self Propulsion Conditions. - Proceeding of the Second International Conference on Fast Sea Transportation (FAST'93). — Vol. 1, Yokohama, Japan, 13-16 December 1993.
- 5. KaMeWa FF Jet 450. Power/rpm curves. Thrust curves.
- 6. Мавлюдов М. А., Русецкий А. А. и др. Движители быстроходных судов. Л., Судостроение, 1973.
- 7. Войнаровский Ю. М. Как рассчитать оптимальный водомет // Катера и яхты, 1986, №119.
- 8. Он же. Определение рабочих параметров водометного движителя с полнонапорным водозаборником: Совершенствование ходовых, мореходных и маневренных качеств судов. — Мат-лы по обмену опытом / НТО судостроителей им. акад. А.Н.Крылова, 1983, вып. 378, с. 16-25.