В США компаниями «Уиндшип Девелопмент Корпорейшн» и «Уиндфри Инкорпорейтед», занимающимися проблемами использования ветровой энергии для движения судов, в 1983 г. были начаты комплексные испытания роторного движителя, принцип действия которого основан на использовании эффекта Магнуса (см. «КЯ» №104). Испытания проводились для оценки эффективности роторных движителей в сравнении с жесткими парусами типа крыла и парусами из ткани.
Цилиндрический ротор диаметром 1,16 м, высотой 7,19 м и площадью боковой проекции 8,34 м2 был установлен на носовом участке палубы моторной яхты «Трэйкер» валовой вместимостью 18 per. т. Корпус ротора, полый внутри и снабженный аэродинамическими шайбами у торцов, изготовлен из алюминиевого сплава; его масса — 82 кг.
В вертикальном положении ротор поддерживается при помощи мачты, которая внутри полости цилиндра доходит до середины его высоты. На топе мачты установлен гидромотор, вращающий корпус ротора. Скорость и направление вращения ротора можно контролировать с поста управления судном. В ходе испытаний частота вращения ротора не превышала 580 об/мин.
Как показали испытания, затрачиваемая на вращение ротора мощность в среднем составляет около 10 % величины мощности, развиваемой ротором и преобразуемой в тягу. Зависимость тяги от скорости вращения ротора нелинейна. С повышением частоты вращения коэффициент тяги возрастает, однако в этом случае на вращение будет расходоваться значительная мощность. Шероховатость поверхности ротора практически не влияет на его аэродинамические качества, зато от нее может зависеть величина мощности приводного двигателя.
Величину развиваемой ротором тяги могут ограничивать конструктивные возможности самого устройства и судна (прочность ротора, остойчивость судна). Например, на «Трэйкере» роторный движитель рассчитан на работу при скоростях кажущегося ветра не более 20 уз. В случае превышения этой величины ротор необходимо «разгрузить», снизив скорость его вращения. Такая разгрузка требуется при курсе бейдевинд, когда скорость кажущегося ветра является векторной суммой скоростей ходового воздушного потока и истинного ветра.
При ветрах кормовой четверти, когда скорость кажущегося ветра невелика (вектор скорости ходового воздушного потока вычитается из скорости истинного ветра), требуется очень незначительная регулировка частоты вращения; при слабых ветрах «разгрузка» не требуется вообще.
Оптимальное направление истинного ветра смещено в корму от траверзного (галфвинда) за счет силы воздушного сопротивления, особенно при возрастании скорости ветра.
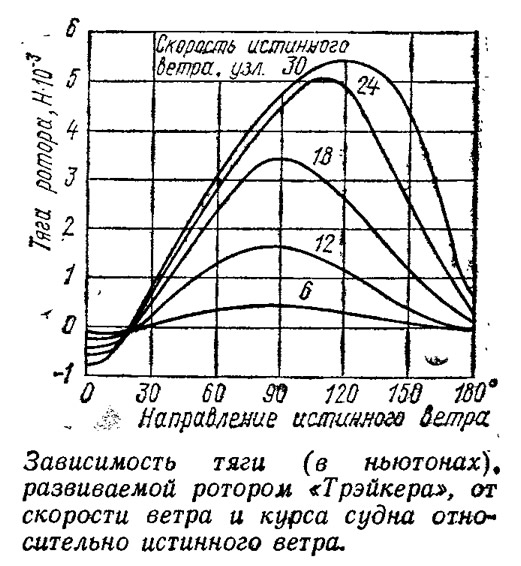
Из графика, отражающего результаты испытаний «Трэйкера», видно, что полезная тяга появляется при направлениях истинного ветра по отношению к ДП судна от 20° и выше, а максимум ее достигается при курсовом угле от 85° (при скорости ветра 6 уз) до 110° (при 30 уз). Заметим, что площадь боковой проекции ротора «Трэйкера» составляет всего 1/6 площади паруса, создающего ту же величину тяги, а при отношении скорости поверхности ротора к скорости ветра не ниже 4,0 сила сопротивления ротора оказывается ниже.
Испытания роторного движителя на яхте «Трэйкер» доказали, во-первых, возможность экономить до 20—30% топлива при совместной работе ротора и обычного двигателя яхты, во-вторых, — способность яхты при скорости ветра 7—8 м/с идти со скоростью 6 уз только под ротором. Окупаемость установки ротора на яхте оценивается двумя-тремя годами.

- Главная
- Консультации
- Опыт эксплуатации
- 1985 год
- Комплексные испытания роторного ветряного движителя
Подкатегории раздела
Полезные устройства
Полезные советы
Улучшение судов
Улучшение моторов
Опыт эксплуатации
Техника плавания
Разбор аварий
Рыболовам
Поделитесь информацией
Похожие статьи
Роторные ветряные движители для судов
Работа водометного движителя на аквабайках класса PRO-1200
Параметрическая диаграмма водометного движителя при максимальном КПД струи
Подвесной мотор «Ока» проходит испытания
Два варианта движителя для мелких плавсредств
Дюралюминиевая мотолодка «Прогресс» проходит испытания
Испытания дюралевой лодки «МКМ»
Экраноплан «KAG-3» и его испытания
Испытания лодки «Косатка» с мотором «Вихрь-30»
Водометный катер «Изумруд» проходит испытания
Испытания катера и доводка гребного винта
Маршрутные испытания новых подвесных моторов «Ветерок»
Модельные испытания новой мотолодки «Казанка»
Ходовые испытания дюралевой мотолодки «Казанка-5»
Работа водометного движителя на аквабайках класса PRO-1200
Параметрическая диаграмма водометного движителя при максимальном КПД струи
Подвесной мотор «Ока» проходит испытания
Два варианта движителя для мелких плавсредств
Дюралюминиевая мотолодка «Прогресс» проходит испытания
Испытания дюралевой лодки «МКМ»
Экраноплан «KAG-3» и его испытания
Испытания лодки «Косатка» с мотором «Вихрь-30»
Водометный катер «Изумруд» проходит испытания
Испытания катера и доводка гребного винта
Маршрутные испытания новых подвесных моторов «Ветерок»
Модельные испытания новой мотолодки «Казанка»
Ходовые испытания дюралевой мотолодки «Казанка-5»
Комплексные испытания роторного ветряного движителя
Год: 1985. Номер журнала «Катера и Яхты»: 113 (Все статьи)

ПРЕДЫДУЩИЕ СТАТЬИ
Первая помощь при травмах на природе
Советы начинающему коку: свежие овощи
Способы снятия судна с мели
Бензиновый двигатель на дизельном топливе?
Консультации по моторам «Ветерок», «Москва», «Сузуки» и других
Сигнал подает автомат «Человек за бортом!»
Отзывы о надувной байдарке «Ласточка-1»
Камеры в качестве поплавков тримарана
Что такое гроза на воде и защита судна от молнии
Полезные мелочи: узел, тент, трос, замок, швартовка, удилище...
Помощь при кровотечении в походных условиях
Способы сушки овощей
Консультации по моторам «Москва», «Ветерок» и прочие
Почему опрокидываются суда, построенные с соблюдением законов остойчивости?
Отзыв о гребной лодке «Славянка»
Советы начинающему коку: свежие овощи
Способы снятия судна с мели
Бензиновый двигатель на дизельном топливе?
Консультации по моторам «Ветерок», «Москва», «Сузуки» и других
Сигнал подает автомат «Человек за бортом!»
Отзывы о надувной байдарке «Ласточка-1»
Камеры в качестве поплавков тримарана
Что такое гроза на воде и защита судна от молнии
Полезные мелочи: узел, тент, трос, замок, швартовка, удилище...
Помощь при кровотечении в походных условиях
Способы сушки овощей
Консультации по моторам «Москва», «Ветерок» и прочие
Почему опрокидываются суда, построенные с соблюдением законов остойчивости?
Отзыв о гребной лодке «Славянка»
ТЕКУЩАЯ СТАТЬЯ
Комплексные испытания роторного ветряного движителя
СЛЕДУЮЩИЕ СТАТЬИ
Психология в подготовке гонщика-яхтсмена
На надувной лодке с байдарочным веслом
Подготовка водителей маломерных судов в Белоруссии
Первая помощь при переломах на природе
Кухонный инвентарь для походных условий
Рациональное питание в походных условиях
Из опыта восстановления стального корпуса катера
Ремонт и замена сгнившей части форштевня
Полезные мелочи: спаскруг, втулки, камбуз, эпоксидка, регномер...
Консультации по моторам «Ветерок», «Нептун» и «Вихрь»
Электронная вспышка-отмашка
Конструкция анеморумбометра для яхты (измерение скорости и ветра)
Штормование лежанием в дрейфе
Международная гонка на кубок Японского моря в 1984 году
Самостраховка и самопроверка основа безопасности
На надувной лодке с байдарочным веслом
Подготовка водителей маломерных судов в Белоруссии
Первая помощь при переломах на природе
Кухонный инвентарь для походных условий
Рациональное питание в походных условиях
Из опыта восстановления стального корпуса катера
Ремонт и замена сгнившей части форштевня
Полезные мелочи: спаскруг, втулки, камбуз, эпоксидка, регномер...
Консультации по моторам «Ветерок», «Нептун» и «Вихрь»
Электронная вспышка-отмашка
Конструкция анеморумбометра для яхты (измерение скорости и ветра)
Штормование лежанием в дрейфе
Международная гонка на кубок Японского моря в 1984 году
Самостраховка и самопроверка основа безопасности
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории