
Отметим, что для поддержания СВП обычного типа над опорной поверхностью необходимы значительные затраты мощности. Одним из возможных путей уменьшения этих затрат является переход на использование скоростей, превышающих так называемую критическую, при которой напор встречного воздушного потока равен давлению в воздушной подушке. Было установлено, что движение с такими скоростями (при соответствующем оформлении корпуса судна) позволяет отказаться от затрат мощности на искусственную подачу воздуха под днище и создавать необходимую зону повышенного давления только благодаря реализации скоростного напора встречного воздушного потока. Этот вывод и был положен в основу создания СВП безвентиляторного типа или, как их теперь называют, экранопланов.
С другой стороны, многочисленные исследования, проводимые в авиации в связи с изучением взлетно-посадочных режимов самолетов, позволили обнаружить влияние близости опорной поверхности на аэродинамические характеристики крыла. При этом благоприятный эффект, обусловленный близостью опорной поверхности и характеризующийся существенным увеличением несущей способности крыла при одновременном уменьшении сопротивления движению в диапазоне практических углов атаки, сразу же оказался настолько ощутимым, что возникла идея создания специальных летательных аппаратов, использующих это влияние в течение всего полета. Характерным примером практического использования данного эффекта была пробная эксплуатация летающей лодки «Дорнье» («До-Х»), которая в 1930 г. пересекла Атлантический океан в режиме экраноплана.
Естественно, что различие в самом подходе к решению проблемы обусловило и появление весьма различных конструктивных решений. Приведем фото типичного представителя аппаратов самолетной схемы— «катера с воздушными крыльями» (Aerofoil Boat) «Х-112», построенного Морской лабораторией Радио-технической корпорации «Колинкс» (штат Айова, США) для исследования продольной устойчивости экранопланов. Испытания «Х-112» показали, что принятая компоновка несущих поверхностей обеспечивает удовлетворительную устойчивость как при движении в непосредственной близости от поверхности воды, так и на значительном удалении от нее.
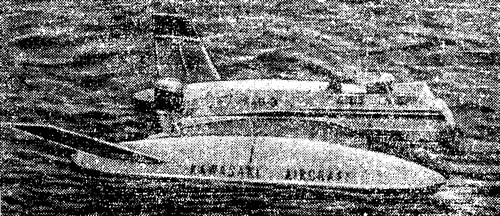
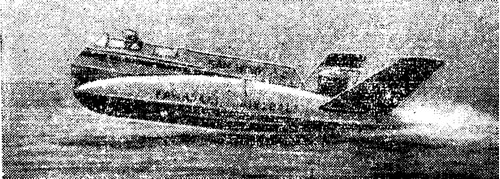
В качестве примера использования второй схемы («летающее крыло») рассмотрим устройство экраноплана «KAG-З» японской фирмы «Кавасаки», компоновка которого показана на рис. 9 в предыдущей статье. Натурные испытания этого аппарата наглядно продемонстрировали положительные качества данной схемы. Многие конструктивные элементы экраноплана «KAG-З» могут заинтересовать любителей водно-моторного спорта при создании высокоскоростных спортивных судов, рассчитанных на использование энергии встречного воздушного потока.
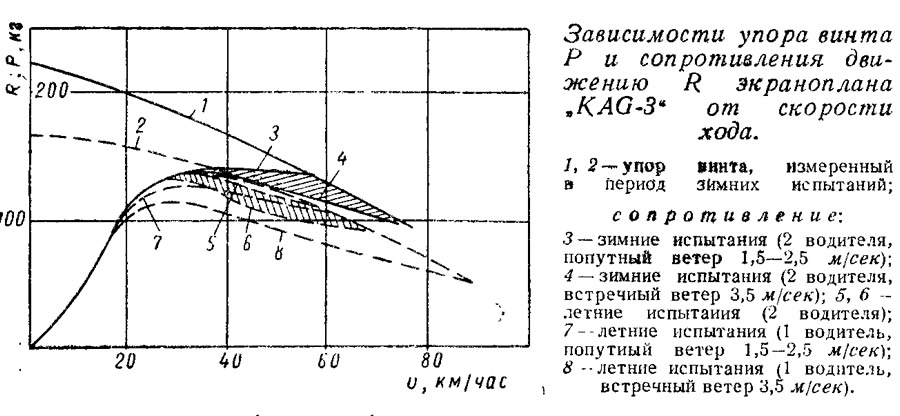
Экраноплан построен для экспериментальных целей. Первые его испытания состоялись в феврале 1963 г., после чего был сделан ряд усовершенствований: установлены дополнительные глиссирующие поверхности на основном несущем крыле (8 на схеме компоновки); поставлены обтекатели кабины водителей (7) и кормовой части поплавков (6). Повторные испытания проводились в мае того же года. Сопоставление результатов замера сопротивления движению до и после модернизации свидетельствует о большом значении обтекаемости корпуса и выступающих частей.

Длина экраноплана 5,88 м; ширина (включая кормовые стабилизаторы) 6,14 м; высота 1,63 м. Длина поплавков 5 м, ширина 0,5 м.
Площадь основного несущего крыла 9,6 м2; хорда 3,58 м; размах 2,68 м; λ=0,75; профиль NАСА-6409, установочный α=6°.
Кормовые стабилизаторы имеют площадь по 1,6 м2; λ=0,615 м; профиль NACA-0009; угол наклона к горизонтали 35°. Стартовая система — закрылки.
Вес экраноплана порожнем 540 кг, полный — 690 кг. Положение центра тяжести в процентах от хорды основного несущего крыла: с двумя водителями 40%, с одним — 42,5%.
С подвесным мотором «Меркюри-800» мощностью 80 л. с. экраноплан показал скорость 85 км/час. Длительность движения на расчетном режиме 40 мин.
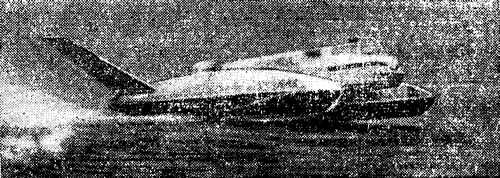
«KAG-З» рассчитан на умеренные скорости хода, соответствующие FrL=1,5÷2,0. На переходном режиме экракоплан идет как обычный глиссирующий катер катамаранного типа. При дальнейшем повышении скорости бортовые корпуса — поплавки отрываются от поверхности, и движение аппарата происходит в непосредственной близости от нее. При ходе на волнении или при неравномерном воздействии встречного воздушного потока, обусловленном отдельными порывами ветра, аппарат совершает незначительные колебания по высоте, периодически касаясь неровностей водной поверхности. Устойчивость аппарата на расчетном режиме движения обеспечивается за счет известного стабилизирующего влияния водной поверхности и соответствующего управления воздушными рулями на стабилизаторах. В отдельных случаях было зафиксировано появление «барса».
Натуральные испытания «KAG-З» позволили установить следующее:
- безразмерный коэффициент подъемной силы, характеризующий несущую силу крыла, Cy=1,2;
- значения аэродинамического и гидродинамического качества соответственно 11,4 и 5,0;
- экраноплан мог совершать полеты над взволнованной поверхностью моря при высоте волн, равной 6% от его длины (0,35 м);
- имевшие место перегрузки значительно меньше, чем при движении глиссирующего катера в подобных условиях. (По утверждению японских специалистов для уменьшения перегрузок необходимо бортовые лодки выполнять еще более узкими, а для обеспечения стартового режима использовать искусственно создаваемую воздушную подушку);
- подводная часть подвесного мотора создает очень большое сопротивление движению, равное примерно половине упора винта.
Постройке экраноплана предшествовали многочисленные экспериментальные исследования на моделях в аэродинамической трубе и опытовом бассейне. Полученные результаты позволили в достаточной мере точно оценить полетные характеристики аппарата, а также сделать ряд выводов, которые не могли быть получены при натурных испытаниях. В частности, была выявлена высокая эффективность концевых шайб при достаточно большом Cy экраноплана с малым λ основного несущего крыла и целесообразность выполнения этих шайб в виде поплавков.
Полученные результаты и накопленный опыт эксплуатации экраноплана «KAG-З» используются фирмой «Кавасаки» при создании более совершенных аппаратов.