
Ниже приводятся справочные данные для оценки величины сопротивления выступающих частей и результаты расчетов сопротивления для некоторых марок отечественных подвесных моторов; эти сведения могут быть полезны как конструкторам быстроходных глиссирующих катеров и мотолодок, так и спортсменам-водномоторникам, работающим над доводкой своих судов.
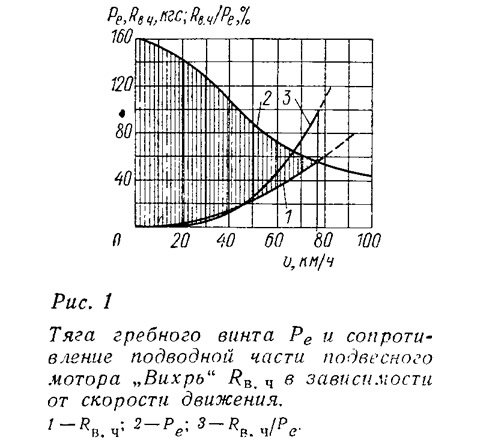
Полное сопротивление выступающих частей Rв.ч того или иного тела (стойки, руля, наклонного вала) можно условно разделить на профильное и брызговое:

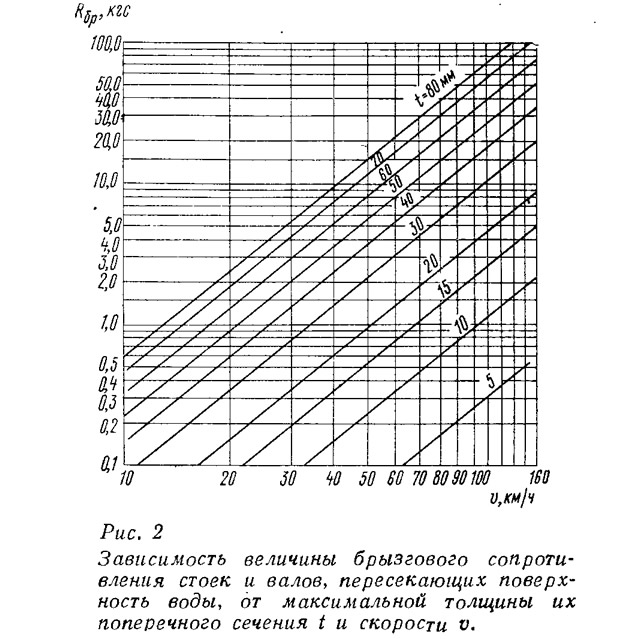
Можно допустить, что профильное сопротивление зависит от размеров, формы и качества обработки поверхности тела, а брызговое — в основном от максимальной толщины поперечного сечения тела в районе пересечения им поверхности воды (рис. 2).
Величина профильного сопротивления с достаточной-точностью определяется формулой

или для тел, форма которых разбивается на отдельные, характерные элементы,

где Сх — коэффициент профильного сопротивления тела, обтекаемого водой, отнесенный к максимальной площади поперечного сечения Ω, м2;
— скоростной напор набегающей воды, кгс/м2 (ρ=102 кгс·с2/м4 — массовая плотность воды, v — скорость движения, м/с);
Схi; ωi — коэффициенты профильного сопротивления и площади соответствующих поперечных сечений отдельных элементов, составляющих обтекаемое тело сложной формы.
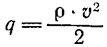
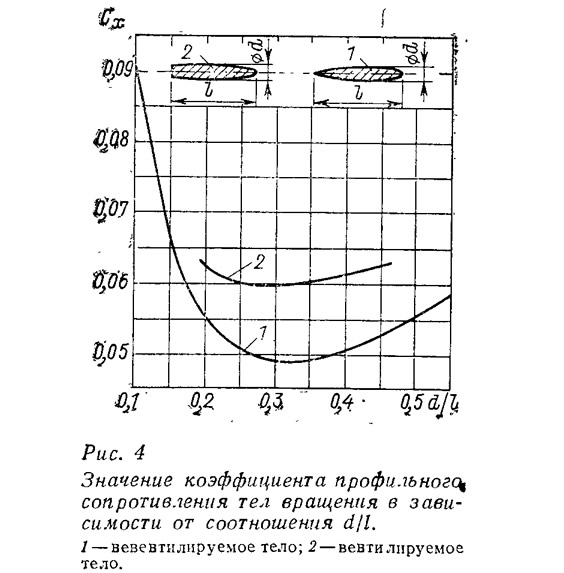
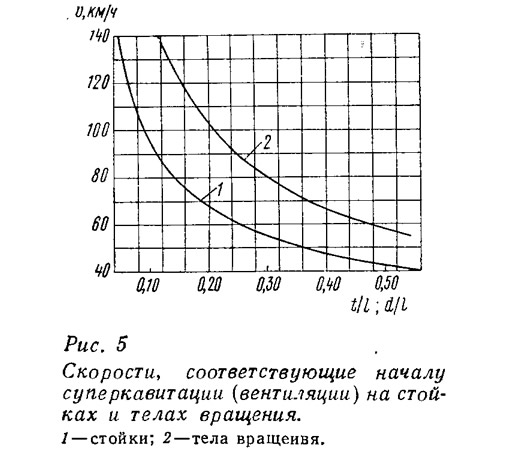
На рис. 3 и 4 приведены значения коэффициентов профильного сопротивления для стоек и тел вращения обтекаемой формы в режиме отсутствия кавитации и в суперкавитирующем режиме, когда обтекание тела в районе хвостика профиля носит уже отрывной характер и за телом образуется развитая парогазовая каверна. Скорость, при которой наступает режим суперкавитации и становятся эффективными суперкавитационные вентилируемые профили, специально рассчитываемые на прорыв воздуха в каверну из атмосферы, ориентировочно можно оценить по рис. 5.
Для «тонких» — имеющих t/l<0,1 стоек, плавников (или антикавитационных пластин подвесных моторов) величина полного сопротивления определяется, как для пластин:
где ζтр — коэффициент трения пластины; Sсм — полная смоченная поверхность пластины, м2.
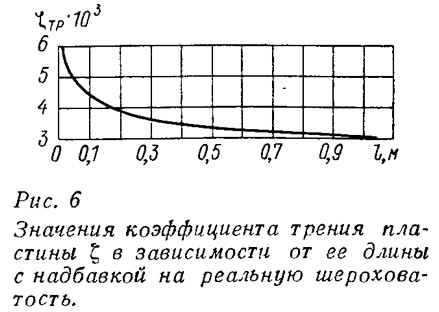
Для интересующего нас диапазона скоростей (20—25 м/с) коэффициент трения пластины, имеющей реальную шероховатость поверхности, может быть определен по рис. 6 в зависимости от длины пластины или сечения тонкого профиля.
Снижение сопротивления выступающих частей является важным резервом повышения скорости. Следует добиваться всемерного уменьшения площадей поперечных сечений находящихся в воде детален, снижения коэффициентов сопротивления (за счет улучшения профилировки, выбора оптимальных удлинений сечений), снижения сопротивления трения путем тщательной обработки поверхности.
Для оценки эффективности указанных путей снижения сопротивления приведем несколько примеров. Так, отмечено, что полировка подводной части подвесного мотора уменьшает профильное сопротивление на 10% (это 5—7% полного сопротивления) по сравнению с серийным исполнением. Еще более высокие результаты дает выбор правильной профилировки. По некоторым данным, переход на профили серий ЦАГИ-В или NACA-16 может привести к уменьшению величины Сх в 1,3—1,5 раза.
Путь снижения сопротивления выступающих частей за счет максимального сокращения их поперечного сечения и применения оптимального удлинения обычно оказывается очень сложным, поскольку эти вопросы связаны непосредственно с конструкцией редуктора, элементами валопровода, прочностью кронштейнов и т. п. Оптимальное решение дают только совместные усилия конструкторов, механиков и гидродинамиков, направленные на получение максимального пропульсивного качества всего движительно-моторного комплекса при заданном скоростном режиме.
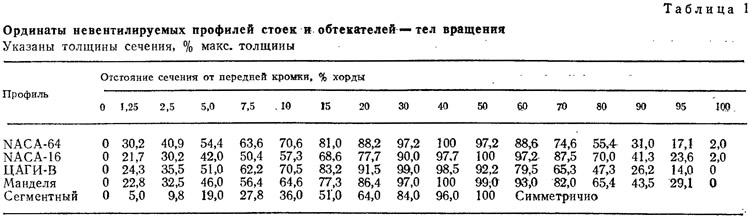
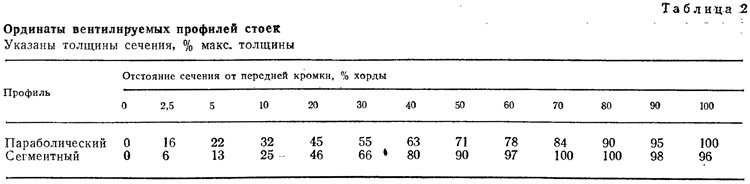
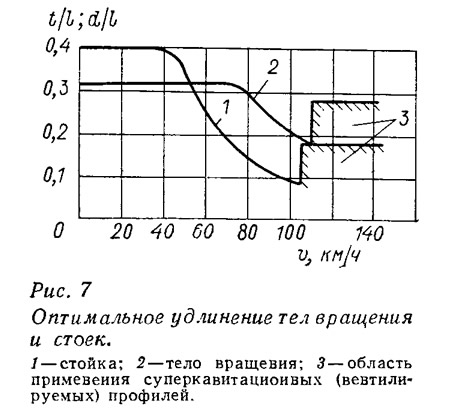
Практически при выборе профиля подводных частей стоек и обтекателей редукторов можно воспользоваться данными табл. 1 и 2 и рис. 7.
Еще один способ эффективного снижения сопротивления выступающих частей — сокращение площади их поперечного сечения за счет уменьшения глубины погружения. Этот путь возможен, например, при использовании частично погруженных винтов (ЧПВ) и уже широко применяется спортсменами-водномоторниками.
Правильно выбрать глубину погружения движительного комплекса, однако, довольно сложно, так как от нее прямо зависят эффективность ЧПВ (снижение к. п. д. по сравнению с полностью погруженным винтом), подача охлаждающей воды при использовании серийных подводных частей подвесных моторов, вибрационные нагрузки при работе ЧПВ и, следовательно, требования к прочности гребных валов и кронштейнов. Кроме того следует иметь в виду, что уменьшение погружения винта далеко не всегда обеспечивает снижение сопротивления. Так, при некоторых вариантах погружения подводной части подвесного мотора из-за увеличения толщины поперечных сечений, пересекающих поверхность воды, и соответствующего значительного роста брызгового сопротивления величина общего сопротивления подводной части не снижается, а может возрасти настолько, что использование ЧПВ окажется неэффективным.
Для оценки полного сопротивления подводной части подвесного мотора в зависимости от его погружения (при осевом обтекании редуктора) на рис. 8, а—е приведены соответствующие данные для ряда моделей отечественных моторов. На графиках учтено возникновение вентиляционного обтекания отдельных элементов подводных частей при высоких скоростях движения. Для расчета сопротивления подводной части на интересующей нас скорости величину удельного сопротивления (полное сопротивление, отнесенное к -скоростному напору), снятую с кривых при заданном погружении мотора, следует умножить на скоростной напор, соответствующий скорости.
Пример 1. Определим сопротивление подводной части мотора «Москва-30», установленного на лодке, движущейся в режиме глиссирования со скоростью 50 км/ч (v=13,9 м/с) при погружении антикавитационной плиты на 20 мм ниже уровня днища.
В соответствии с рис. 8, б на этой скорости обтекание будет носить бес-кавитационный характер, а величина удельного сопротивления (по кривой 1) составит 20·10—4. Умножив эту величину на скоростной напор, для скорости 50 км/ч равный

получим полное сопротивление

Пример 2. Определим сопротивление мотора «Ветерок-12», установленного на спортивной мотолодке, движущейся со скоростью 60 км/ч (v=16,7 м/с). Для уменьшения сопротивления лодки мотор значительно поднят: при движении его анти-кавитационная плита находится выше уровня воды на 50 мм.
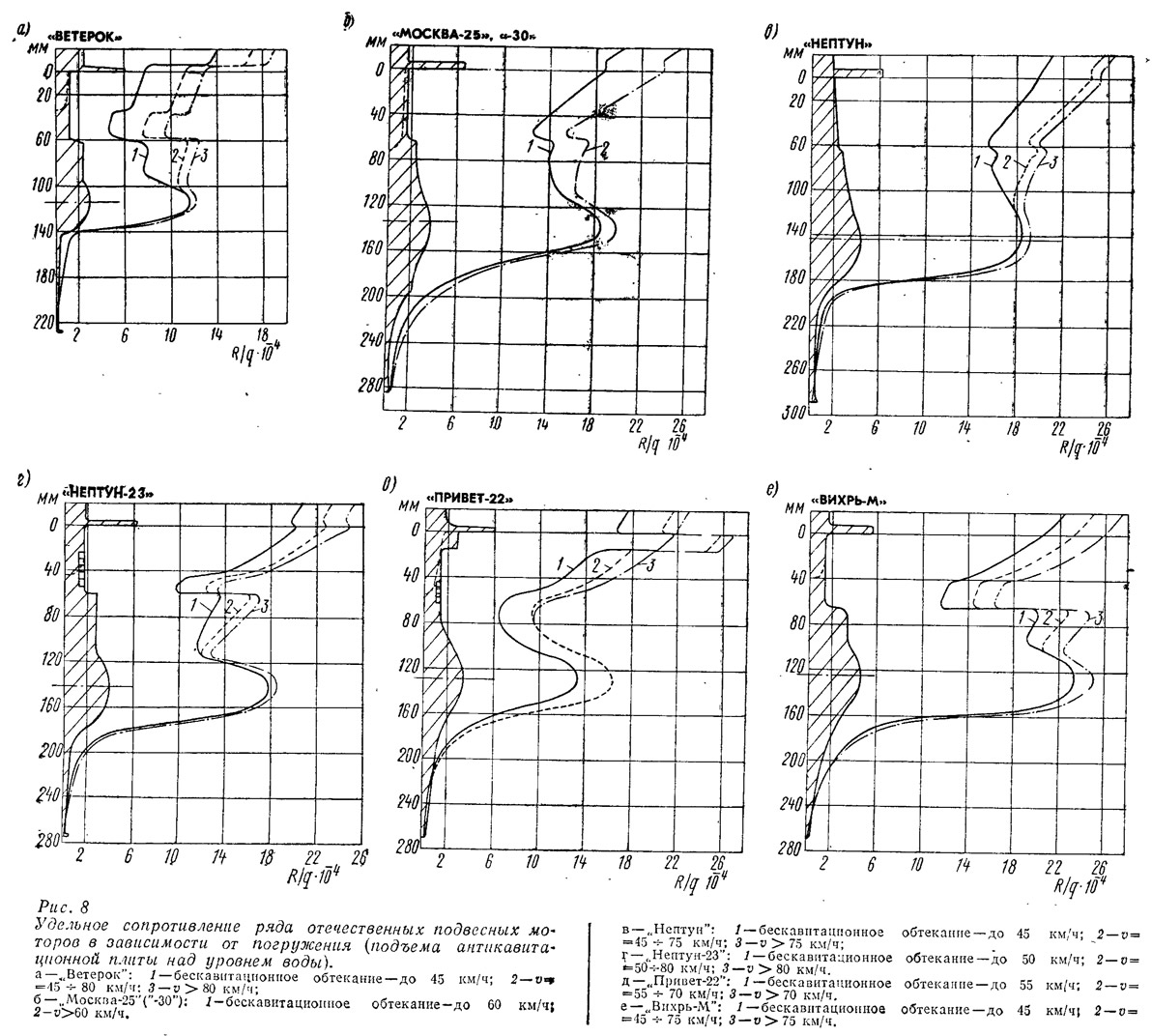
По рис. 8, а с кривой для скоростей в диапазоне 45÷80 км/ч снимаем R/q=7,5·10—4. Скоростной напор для v=16,7 м/с, составит 14200 кгс/м2.
Сопротивление воды движению подводной части мотора равно

обтекатель редуктора выходит из воды. Это, однако, в ряде случаев неосуществимо, так как не обеспечивается подача охлаждающей воды, невозможно использовать гребной винт оптимальных для номинальной частоты вращения двигателя параметров. Чаще применяют такие варианты установки мотора, при которых обтекатель редуктора и утолщения стойки находятся под поверхностью воды.
Исследование формы отдельных элементов подводных частей подвесных моторов позволяет сделать следующие выводы:
- около 15—20% полного сопротивления составляет сопротивление козырька газовыхлопа;
- крайне нежелательно увеличение толщины стоек в районе пересечения поверхности воды, имеющееся, например, на моторах «Ветерок»;
- минимальным удельным сопротивлением среди наших моторов на 20—30 л. с. обладает подводная часть мотора «Привет-22» (на скорости 50—55 км/ч это снижение сопротивления по сравнению, например, с «Нептунами», позволяет экономить 1—1,5 л. с. мощности двигателя);
- наименьшее относительное сопротивление (отнесенное к мощности мотора) при погружении антикавитационной плиты на 20 мм под поверхность имеют моторы «Москва-25» и «-30»;
- для моторов «Ветерок», «Нептун», «Вихрь-М» скорость, при которой начинается вентиляция отдельных элементов подводной части, не превышает 45 км/ч. Отрывное обтекание этих элементов на больших скоростях вызывает существенный прирост удельного сопротивления выступающих частей и приводит к потере эффективного упора на 5—7%.
Следует заметить, что подводные части современных зарубежных моторов в большинстве случаев лишены отмеченных недостатков. Для них характерны очень тонкие стойки, применение обтекателей редукторов (имеющих минимальные размеры), отсутствие козырьков газовыхлопа, тщательная профилировка всех элементов подводной части, высокое качество обработки поверхности. Это позволяет уменьшить удельное сопротивление подводных частей этих моторов примерно на 20—25%, что в конечном итоге при скоростях движения 50—55 км/ч позволяет повысить эффективную тягу мотора на 5—7%.
Сказанное выше о важности снижения сопротивления выступающих частей справедливо и для малых быстроходных судов со стационарными двигателями.
Подводная часть угловых откидных колонок обычно полностью идентична подводной части подвесного мотора; для оценки сопротивления ее вполне приемлемы рассмотренные выше методы.
На катерах с обычным движитель-но-рулевым комплексом выступающими частями являются наклонный гребной вал, кронштейны гребного вала и руль, сопротивление которых можно подсчитать по приводимым графикам. С точки зрения уменьшения сопротивления выступающих частей исключительно важен рациональный выбор «диаметра вала, конструкции кронштейнов и подшипников гребного вала, а также уменьшение их погруженной площади сечения при применении ЧПВ.
При расчетах за относительное удлинение профиля наклонного гребного вала следует принимать величину (t/l = sin α), где α — угол наклона гребного вала, а за площадь поперечного сечения — площадь проекции вала на плоскость мидель-шпангоута.
Сопротивление руля (рулей) может достигать 40% полного сопротивления всех выступающих частей катера. Кроме того следует учитывать, что рули, расположенные непосредственно в спутном потоке за гребным винтом, дают дополнительное сопротивление, вызванное увеличением скорости их обтекания.
Форму и площадь пера руля обычно выбирают исходя из требований к поворотливости катера. Однако надо иметь в виду, что для обеспечения устойчивости движения катера на прямом курсе площадь руля может быть существенно меньше (в некоторых случаях катера имеют достаточную устойчивость движения вообще без руля). Вполне очевидно, что возможность уменьшения площади руля позволила бы значительно снизить сопротивление катера на прямом курсе. Наиболее простым способом уменьшения площади пера руля на ходу является его подъем из воды.
Существует, например, несколько схем подъемных рулей. В одной из интересных конструкций используются два подъемных руля, заранее развернутых в противоположные стороны на соответствующий угол относительно диаметральной плоскости катера. На прямом курсе оба руля подняты и Находятся в воздухе. Для поворота один из рулей опускается в воду, причем боковая сила на нем (и диаметр циркуляции) регулируется величиной погруженной площади — глубиной погружения пера руля. Погружение подобных рулей может осуществляться поворотом пера вокруг горизонтальной или наклонной оси либо вертикальным опусканием и т. п. Управление рулями может осуществляться одним штурвалом, однако кинематическая схема привода при этом получается более сложной, чем для обычного руля с вертикальным баллером. Поэтому в других схемах для упрощения конструкции подъем руля осуществляется самостоятельным механизмом (в этом случае по требованиям безопасности он обязательно должен быть хотя бы самовозвратным!).
Как показали проведенные ходовые испытания, установка подъемных рулей позволила увеличить скорость спортивного катера класса S1 с 75 до 82 км/ч, а глиссеров R2 и R4 со 110 до 125 и со 130 до 150 км/ч соответственно.