
«Природа всегда выбирает лучшее из возможного, причем в определении лучшего всегда входит достижимостью.
Аристотель
Молодая наука — бионика
Внимание ученых, особенно в последние два-три десятилетия, все настойчивее обращается к использованию закономерностей, заимствованных у живой природы. И в наш век научно-технической революции природа продолжает оставаться для человека мудрым учителем, неиссякаемым источником идей. Возникла совершенно новая наука — бионика, возникает и самостоятельная ее отрасль — гидробионика.
Изучение гидродинамики морских животных и рыб становится одной из главных задач гидробионики. До недавнего времени оставалась загадкой та высокая скорость, с которой плавают рыбы и китообразные. Ученые-биологи не могли объяснить, за счет чего, например, меч-рыба, атакующая свою жертву, легко развивает большую скорость. Не до конца понятны были сами физические основы передвижения ската, парения летучей рыбы. Лишь в последние годы эти тайны начали открывать в первую очередь благодаря тому, что на изучение живой природы, ставшее уже насущной потребностью, был брошен значительный арсенал достижений современной науки и техники.
Считается, что бионика как наука родилась в 1960 г.; однако полет птиц и плавание рыб привлекали внимание человека еще в древности и, конечно же, подсказали многое создателям кораблей, а в дальнейшем и летательных аппаратов.
Известно, что еще в 1800 г. ученые серьезно изучали профиль форели: эта рыба заинтересовала исследователей способностью к очень быстрому старту из состояния покоя. Впоследствии в результате подобных работ было создано несколько ныне широко применяемых в технике хорошо обтекаемых профилей. Это известные ламинаризированные профили NACA, причем их серия 63 — практически копирует форму тела форели, серия 66 — «обводы» дельфина, 67 — тунца и т. д.
В предвоенные годы в Германии проводились обширные исследования морских животных и рыб, подсказавшие пути уменьшения волнообразования и сопротивления движению быстроходных подводных лодок, а затем и совершенствования форм фюзеляжа сверхскоростных самолетов.
Была разработана форма корпуса экспериментальной подводной лодки «Альбакор» (1953 г.), которая некоторыми своими особенностями напоминала форму тел китообразных. Это была действительно подводная лодка, развивавшая под водой скорость большую, чем в надводном положении. В дальнейшем обводы «Альбакора» послужили прототипом при проектировании ряда атомных подводных лодок США.
Формы кита были положены в основу обводов корпуса при проектировании атомного подводного рудовоза «Моби Дик» (Англия).
Создатели ряда глубоководных исследовательских и поисково-спасательных аппаратов, добиваясь экономии мощности и улучшения управляемости на малых скоростях — при движении вдоль дна, также обращаются к данным гидробионики. Так, при проектировании американского аппарата «Дип квест» использовались обводы, очевидно не случайно называемые «акулообразными». Несомненное сходство обнаруживается при сравнении форм американского глубоководного аппарата «Пэдл Вил» и дискообразной рыбы, обитающей в Амазонке; аппарата Ж. Пикара «Бенджамин Франклин», рассчитанного на дрейф в водах Гольфстрима, — и синей пятнистой рыбы. В первом случае имеется еще и подобие в расположении спинных плавников рыбы и кормового стабилизатора аппарата. Во втором случае, кроме весьма своеобразной формы корпуса, имитируются гидродинамические свойства синей рыбы, состоящие в том, что ее медленное поступательное движение, стабилизация и высокие маневренные качества обеспечиваются одними и теми же грудными плавниками.
Можно добавить, что и совершенствование форм корпуса обычных надводных грузовых судов также не обошлось без некоторого влияния гидробионики. Японские инженеры использовали форму головы круглого усатого кита и пропорции китов при разработке теоретического чертежа океанского судна. Это позволило при сохранении расчетной скорости снизить мощность двигателей на 15%. Распространенные ныне носовые бульбы также имеют связь с аналогами из живого мира.
Наконец, гидробионика подсказывает и пути совершенствования судовых рулей и движителей. В Англии на двух теплоходах установили горизонтальные стабилизаторы, аналогичные плавникам тунца, обеспечивающим великолепные маневренные качества этой рыбы; в результате радиус циркуляции судов удалось снизить вдвое!
Еще в IV веке до н. э. индийский естествоиспытатель Сузрута правильно отметил, что основным движителем рыб являются не боковые плавники, а хвост. Упор создают волнообразное движение тела рыбы, главным образом — хвостовой его части, и колебательные движения вертикального хвостового плавника. Этот принцип положен в основу огромного числа предлагаемых изобретателями движителей (см. например, сборник №54). Одной из немногих реализованных попыток создать подобный плавниковый движитель является построенное недавно в ГДР речное судно: корпус его выполнен в виде неподвижного крыла достаточно большой относительной толщины, а к нему подвешен колеблющийся закрылок.
Время энтузиастов-одиночек прошло: только в США в области изучения особенностей строения тела морских животных и механизма их движения работает не менее десяти крупных хорошо оснащенных исследовательских центров, субсидируемых, как правило, ВМС.
Сделано уже немало, но все сделанное — это только начало.
В последнее время внимание группы исследователей, включающей А. И. Короткина, М. В. Бегака, В. П. Шадрина и автора данной статьи, привлекли особенности плавания и некоторые вопросы гидромеханики скатов и летучих рыб, использующих в отдельные моменты своего движения влияние опорной поверхности на границе раздела Двух сред — воды и дна или воздуха и воды.1
Чем интересен скат?
Из всего многообразия скатов, а их известно чуть ли не 340—350 видов, нас интересовали только скаты, ведущие придонный образ жизни. Большую часть времени такие скаты спокойно лежат на дне, но, преследуя добычу, развивают довольно большую скорость, поднимаются вверх и могут даже появляться на поверхности! «Придонные» скаты имеют одну интересную особенность — отрицательную плавучесть. Другими словами, неподвижный скат сразу же идет на дно! И наоборот, при движении вперед и особенно — при «старте» со дна какую-то часть своей мощности ему приходится затрачивать на создание гидродинамической подъемной силы.
Неудивительно, что в процессе эволюции скаты получили такую форму плоского, ромбовидного в плане тела, которую гидромеханики считают оптимальной с точки зрения создания максимальной подъемной силы при наименьшем сопротивлении воды движению рыбы. Но это еще не все: можно было Предположить, что эта форма ската приспособлена именно к быстрому «набору скорости» при движении вблизи дна, играющего роль своеобразной опорной поверхности — экрана.
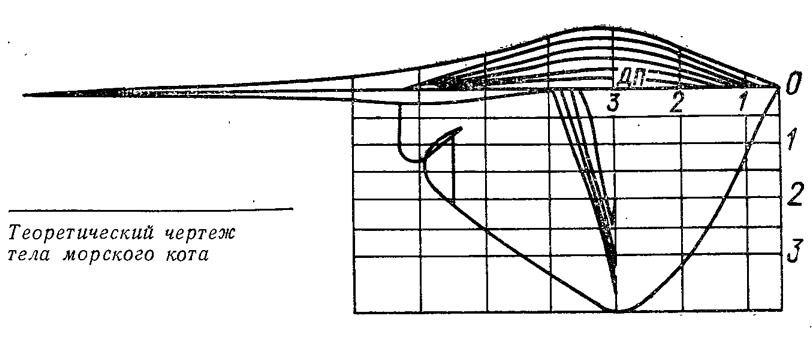
В качестве объекта исследований был выбран скат из семейства хвостоколовых — морской кот, который в изобилии водится в Черном и Азовском морях. В районе мыса Тарханкут начались работы с отлова скатов и составления их обобщенного теоретического чертежа. Морские коты достигают длины 2,5 м, но нам, естественно, было удобнее иметь дело со скатами меньших-размеров. Каждый из пяти пойманных скатов был тщательно обмерен по двум продольным и четырем поперечным сечениям; очертания их в плане мы получали, просто укладывая ската на бумагу и обчерчивая по периметру.
Форму тела черноморского кота можно характеризовать, пользуясь языком гидромеханики, таким образом. Это ромбическое в плане несущее подводное крыло с соотношением размаха и условной максимальной хорды, равным 1,33. Передняя кромка тела острая и приподнята на 1—1,5% хорды соответствующего продольного сечения; плоская нижняя поверхность тела начинается на расстоянии 0,1—0,15 хорды от передней кромки. Диаметральное сечение имеет некоторую S-образность в передней и задней части. Максимальная толщина профиля продольных сечений составляет 4,5—8% хорды и находится на расстоянии 0,3—0,4 хорды от передней кромки. Относительная кривизна (отношение стрелки прогиба средней линии профиля к хорде тела) изменяется по среднему размаху в пределах 0—4%.
Можно было сразу же сделать вывод, что эти геометрические характеристики довольно сложной формы скатов очень близки к характеристикам известных в аэродинамике крыльев, оптимальных именно при движении вблизи твердой поверхности. Форма тела в плане, форма поперечных сечений и распределение кривизны по размаху обеспечивают минимальное индуктивное сопротивление, обусловленное перетеканием жидкости по концам крыла. Упомянутый подъем профиля в носике также имеет объяснение: он может служить для предотвращения отрыва потока при положительных углах атаки.
Интересные результаты дала подводная киносъемка. Хорошо видно, что при движении вдоль дна морской кот неизменно выдерживает высоту, равную 0,2—0,25 размаха, т. е. довольно близкую к рекомендуемой специалистами-гидромеханиками. При этом концы плавников в нижнем положении почти касаются дна.
Колеблются грудные плавники — движитель ската — со средней частотой 3,2 взмаха в секунду. В начале периода колебания концы плавников опущены вниз. Подъем начинается с передней их части. Вначале — на протяжении примерно 1/5 периода — оказываются поднятыми только края плавников, а основная их часть, прилегающая к телу, опущена. В среднем за весь период поперечное сечение тела ската представляет собой дужку (выпуклостью кверху) с концами плавников, играющими роль своего рода «машущих шайб». Опущенные вниз концы крыла как раз и препятствуют перетеканию жидкости с нижней поверхности на верхнюю, что и дает повышение гидродинамического качества, уменьшение индуктивных потерь.
Любопытно, что угол атаки крыла — тела ската — изменяется по его длине (размаху), обеспечивая, как считают гидродинамики, выгодное распределение нагрузки («крутка» крыла). Колебания крыла очень сложны. Возможно, что колебательные движения боковых кромок плавников обеспечивают не только создание движущей вперед тяги, но и оптимальное распределение углов атаки крыла.
Наблюдая плавание скатов в естественных условиях, мы обратили внимание на то, что в зависимости от скорости движения изменяется и кинематика движения плавников. При мирных малых скоростях по краям грудных плавников распространяется «бегущая волна», причем в движении этом участвуют только наружные края плавников (20% размаха); прилегающая к телу их часть движется со значительно меньшей амплитудой и продолжает служить в основном несущей плоскостью. При бегстве или погоне амплитуда взмахов плавников возрастает, достигая 0,2 размаха, заметно увеличивается и частота колебаний.
В дальнейшем были проведены исследования твердой модели ската в аэродинамической трубе. Модель испытывалась в условиях безграничной жидкости и вблизи неподвижного плоского экрана, имитирующего дно.
Модель испытывалась целиком и без хвоста; оказалось, что в диапазоне углов атаки ± 8° хвост не влияет на коэффициенты гидродинамических сил и моментов и, очевидно, выполняет чисто биологические функции (на нем расположено оружие ската — ядовитый шип).
Полученные характеристики модели, испытанной в безграничной жидкости, сравнивались с характеристиками круглого в плане крыла с профилем ЦАГИ-21,8%. Сопоставление показало, что при равных коэффициентах гидродинамического сопротивления модель ската обладает даже несколько более высокими несущими свойствами; иначе говоря, крыло, имеющее форму тела ската, имеет более высокое качество, чем профилированный диск.
Аналогичный вывод подсказывает и сравнение гидродинамических характеристик модели ската, установленной вблизи экрана, с соответствующими характеристиками ромбовидного в плане крыла, имеющего профиль ЦАГИ-876 с толщиной 7,5%. Измерения распределения гидродинамического давления по поверхностям модели показали, что ее более высокое качество в безграничной жидкости объясняется большим разрежением, возникающим на верхней, выпуклой, поверхности.
Можно уверенно сказать, что форма тела ската представляет в известной степени оптимальный вариант подводного крыла с удлинением, равным единице, предназначенного для движения вблизи экрана.
Как летает летучая рыба?
Ни одно описание плавания по тропическим водам не обходится без упоминания о летучих рыбах. Издревле картина парения этих диковинных существ над водой завораживала мореходов, не давала покоя умам естествоиспытателей.
Собственно побудительные причины перехода рыб из одной среды в другую загадки не составляли: чтобы спастись от быстроходных преследователей — тунца или меч-рыбы — беззащитным рыбкам не оставалось ничего другого, как взлетать над поверхностью!
В семействе летучих рыб насчитывается более 60 видов, наиболее крупные из них достигают 0,5 м в длину. В наших водах известна лишь японская летучая рыба, которая встречается иногда летом в заливе Петра Великого.
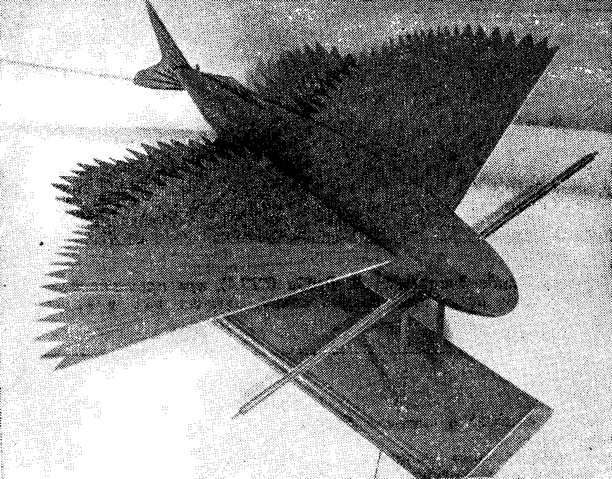
У некоторых видов летучих рыб — одна пара крыльев, у других — две. Эти крылья, которые могут раскрываться и складываться, прижимаясь к телу, представляют собой развитые грудные плавники больших размеров (главные крылья) и широкие брюшные плавники.
Крылья-плавники выполняют различные задачи: служат несущими плоскостями — подводными крыльями — при «планировании» с поверхности в глубину и наоборот при подъеме и разгоне в воде; используются как тормоз для остановки — плывущая с большой скоростью рыба с прижатыми к телу плавниками внезапно разворачивает их веером; наконец, они же играют роль воздушных крыльев — создателей подъемной силы при выпрыгивании рыбы из воды и полете.
Важно подчеркнуть, что эти плавники работают только как несущие плоскости (выдерживающие нагрузку до 1,3 г/см2) и не являются движителями. Распространенное в среде моряков прошлого мнение, что «летучая рыба машет крыльями, как стрекоза или птица», ошибочно. Управляющая плавниками — регулирующая угол атаки и площадь крыльев — мускулатура слишком слаба: ее вес составляет лишь 3% веса всей мускулатуры рыбы. При движении в воздухе возможен лишь пассивный «флаттер» — дрожание больших и мягких плавников, которое и является причиной жужжания, отмеченного еще во времена А. Гумбольдта (только в 1941 г с помощью стробоскопической фотографии удалось доказать, что это жужжание — результат не активного биения плавников, а их пассивной реакции на колебания движителя — хвостового плавника).
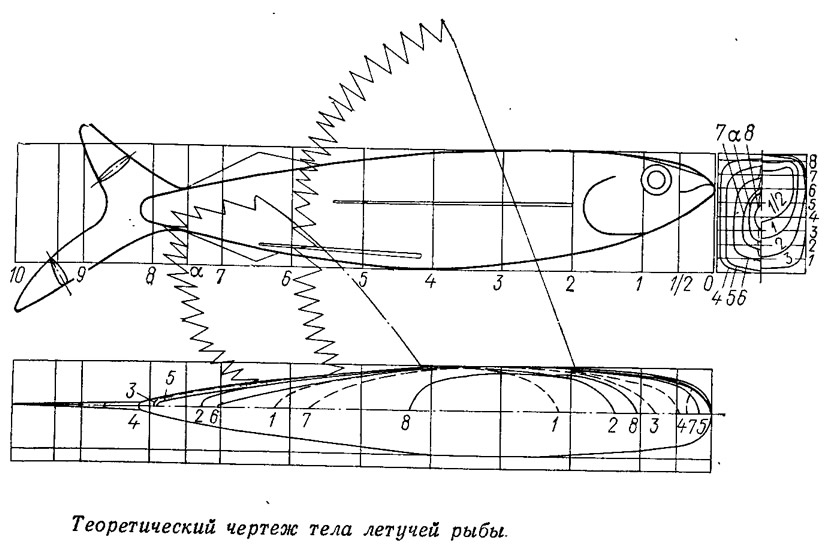
Познакомимся с геометрическими характеристиками летучих рыб, обитающих в центральной части Атлантического океана; их теоретический чертеж построен на основе обмеров 60 экземпляров.
Одной из основных особенностей самого «корпуса» рыб является необычная прямоугольная форма поперечных сечений с плоской брюшной поверхностью, позволяющей глиссировать.
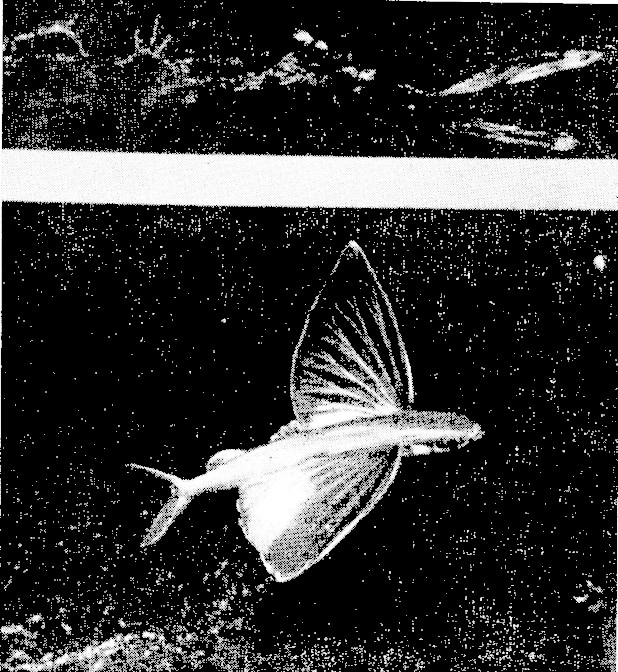
При взлете рыба сначала разгоняется до выхода на режим глиссирования по поверхности воды, а затем частично выскакивает из воды. При этом ее корпус уже находится в воздухе и испытывает значительно меньшее сопротивление, чем в воде, а расправленные крылья-плавники обеспечивают воздушную разгрузку, причем эффективность крыльев дополнительно повышается благодаря близости экрана; в то же время нижняя лопасть хвостового плавника (движителя) продолжает оставаться погруженной в воду и, совершая примерно 50—70 биений в секунду, позволяет довести скорость до значений порядка 60—65 км/ч. (Заметим попутно, что эта скорость уже вдвое выше, чем той же рыбы в воде!) Наконец, рыба изменяет угол атаки крыльев и взмывает вверх. Начальная скорость полета составляет, по-видимому, 54—72 км/ч!
Далее следует свободный полет — не более чем 10-секундное планирование на высоте 0,5—1 м на расстоянии до 50 м; скорость при этом неуклонно падает, а в итоге снижаются подъемная сила на крыльях и высота полета. Когда скорость уменьшится до 36 км/ч, нижняя лопасть хвостового плавника снова погружается в воду, начинается новый разгон до достижения максимальной скорости полета, затем снова следует свободный полет и т. д. В общей сложности рыба может пролететь таким образом до 400 м за 30 секунд. Естественно, что встречный ветер помогает летучей рыбе, как и взлетающему самолету.
Изменяя угол атаки крыльев, летучая рыба может соответственно изменять и траекторию полета вплоть до больше всего привлекающих внимание наблюдателей прыжков на высоту 8—10 м — через небольшие суда; нередко летучие рыбы оказываются и на палубах крупных судов.
Испытания твердой модели летучей рыбы показывают прежде всего высокое гидродинамическое качество отработанных тысячелетней эволюцией форм. Коэффициент гидродинамического сопротивления летучей рыбы составляет всего 0,015.
Подъемная сила, возникающая на плоских (непрофилированных) крыльях-плавниках, при малых углах атаки невелика, но с увеличением углов атаки заметно возрастает: очевидно, сказывается и «бипланный» эффект — взаимодействие обеих пар плавников. Тем не менее, как и в случае со скатом, твердая модель далека от своего намного более совершенного живого прототипа, представляющего сложнейший комплекс систем, смоделировать который пока не удается.
Удалось ли инженерам хотя бы частично воспользоваться результатами биотехнических исследований?
Известно, что во время полета летучая рыба, как и птицы, не только изменяет угол атаки, но и, частично складывая и расправляя плавники, регулирует площадь несущих плоскостей в зависимости от скорости полета: другими словами, крылья всегда работают в зоне их максимального качества. Как известно, этот же принцип изменения геометрии крыла самолета взят на вооружение современными авиаконструкторами.
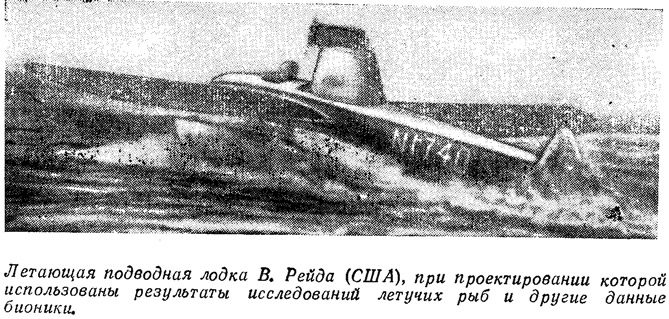
В начале 1968 г. в зарубежной печати проскользнуло сообщение, что американский инженер В. Рейд сконструировал подводную лодку с крыльями, которая могла отрываться от поверхности воды и превращаться в летающий аппарат. Во время эксперимента 8-метровая модель стартовала из воды и поднималась на высоту до 23 м. Считают, что созданию этого необычного экспериментального аппарата, вызвавшего большой интерес ВМС США, предшествовало глубокое изучение движения летучей рыбы.
Говоря об использовании в технике закономерностей, обнаруженных у обитателей моря, стоит подчеркнуть, что простым копированием тех или иных отдельных особенностей морских животных и рыб вряд ли можно добиться коренного усовершенствования существующих сегодня технических устройств. Многие биологические объекты — это модели чрезвычайно сложных явлений, объяснить которые до конца современная наука еще не в состоянии. Познать физическую теорию этих явлений для последующей технической реализации закономерностей живого подводного мира — вот основная задача гидробионики.