
Существенным преимуществом данного лага является синхронная регистрация продольной и поперечной составляющих вектора скорости движения, что в случае необходимости счисления места судна позволяет постоянно учитывать текущее значение величины бокового сноса. Экипажам парусных судов наличие объективной информации о соотношении продольной и поперечной составляющих скорости поможет лучше настраивать паруса и постоянно поддерживать максимальную скорость. Лаг сулит ряд дополнительных выгод и водномоторннкам, особенно на реках, о чем подробно рассказано в №115 «КиЯ».
Опыт двухлетней эксплуатации лага показал, что, в отличие от гидродинамических и электронно-механических лагов, его работоспособность не нарушается при наличии скоплений водорослей, медуз и прочих разнородных включений в приповерхностном слое воды. Достоверность показаний скорости судна не зависит от колебаний солености воды, что соответствует возможностям промышленного образца лага «ИЭЛ-2М», в котором используется тот же принцип преобразования скорости потока воды в регистрируемые электрические сигналы.

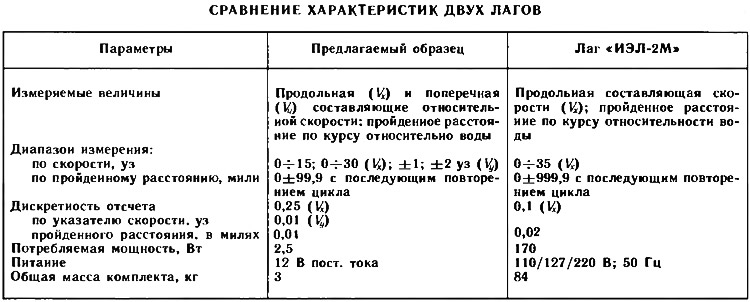
В таблице приведены сравнительные технические характеристики предлагаемого лага и лага промышленного образца «ИЭЛ-2М».
Работа лага основана на регистрации двух ортогональных составляющих скорости набегающего потока воды по изменению ЭДС индукции, создаваемой электромагнитным полем датчика.
В соответствии с законом электромагнитной индукции, сформулированным М. Фарадеем в 1831 г., встречный поток воды, являющейся проводником содержащихся в ней ионов, пересекая магнитное поле, создаваемое электромагнитом датчика, наводит в окружающей его воде электродвижущую силу индукции Ес, пропорциональную скорости потока воды.
Если на электромагнит подается постоянный ток, то из-за продолжительной неизменности полярности электродов у их поверхности будет протекать однонаправленная электрохимическая реакция. Она является причиной возникновения электродвижущей силы помехи, которая превосходит по величине полезный сигнал Ес и неотделима от него. Чтобы избавиться от этого эффекта, необходимо запитывать электромагнит переменным током. Однако в этом случае вместо поляризации электродов возникает квадратурная помеха Еп, исключение которой возможно за счет некоторого усложнения измерительной схемы.
Устранение сигнала помехи Еп основывается на ее свойстве достигать амплитудных значений в моменты, когда скорость изменения магнитного поля максимальна, а питающее напряжение равно нулю. В отличие от этого, полезный сигнал достигает амплитудных значений при максимальной напряженности поля электромагнита, что имеет место при максимуме напряжения в его обмотке.
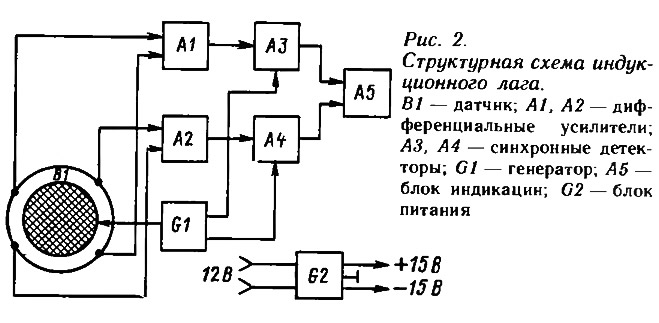
Для уяснения сущности работы лага обратимся к его структурной схеме (рис. 2). Индуцируемые на электродах потенциалы, являющиеся суммой полезного сигнала и квадратурной помехи, усиливаются дифференциальными усилителями A1 и А2, которые имеют большое входное сопротивление — это обеспечивает верное измерение скорости независимо от колебаний солености забортной воды. С выходов усилителей сигналы поступают на синхронные детекторы А3 и А4, управляемые опорным напряжением от генератора G1, запитывающего катушку датчика электромагнита В1. Синхронные детекторы выделяют из суммарных сигналов те их составляющие, которые пропорциональны проекции относительной скорости потока в направлении, перпендикулярном осям пар электродов. При этом значение сигнала продольной скорости судна выводится на соответствующий индикатор блока индикации А5 (как сумма сигналов с выходов детекторов АЗ и А4), а значение поперечной скорости, характеризующее дрейф судна, представляется как разность этих сигналов.1
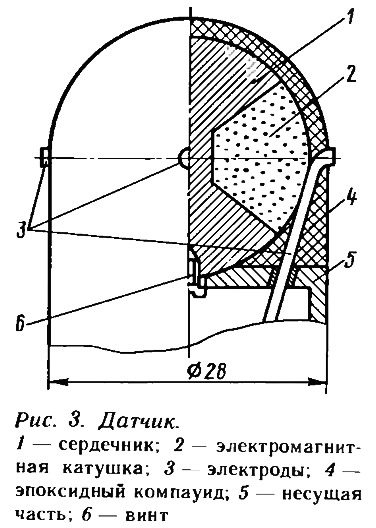
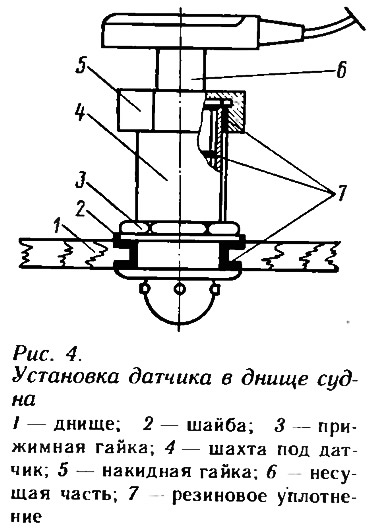
Датчик индукционного лага (рис. 3) содержит сердечник, в паз которого уложена электромагнитная катушка. Поверх катушки осесимметрично расположены электроды. Сверху сердечник и катушка покрыты слоем эпоксидного компаунда — так, что в контакте с водой находятся лишь торцы электродов. Винтом датчик крепится к несущей части, которая может быть выполнена в одном из двух вариантов. Простейшим является использование длинной трубки штанги малого диаметра из коррозионностойкого металла. Крепление для штанги с датчиком легко установить в любом удобном месте надводной части корпуса судна. Однако, фиксируя датчик, следует позаботиться о том, чтобы в пределах возможных величин крена и дифферента судна он всегда оставался погруженным в воду. Другой вариант, предполагающий установку датчика в днище судна, показан на рис. 4.
Крепя датчик, нужно точно выдерживать угол 45° между осями пар электродов и диаметральной плоскостью судна. В противном случае действительное нулевое положение стрелки — указателя индикатора поперечной составляющей вектора скорости судна окажется смещенным относительно стандартной оцифровки шкалы прибора (из-за несовпадения истинных координатных осей датчика лага и корпуса судна). Поэтому окончательную юстировку положения датчика целесообразно производить на судне, стоящем на якоре, когда диаметральная плоскость ориентируется строго по направлению течения. При этом датчик фиксируют в среднем положении диапазона, в пределах которого индикатор поперечной скорости показывает нулевые значения при наличии показаний скорости хода.
Сердечник датчика, размеры которого представлены на рис. 5, изготавливается из пермаллоя марки 79НМ. Возможно применение и низкочастотных электротехнических сталей. В крайнем случае, можно использовать сталь марки Ст.10. Для повышения магнитных свойств сердечника после его механической обработки рекомендуется провести отжиг, который обеспечит повышение чувствительности датчика при той же величине энергопотребления и прочих равных условиях.
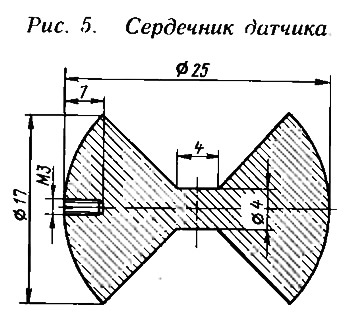
Катушка датчика наматывается проводом ПЭВ-2 диаметром 0,12 мм до заполнения трапециевидного паза сердечника. При этом сопротивление катушки по постоянному току будет порядка 150 Ом. Материалом для электродов может служить проволока из нержавеющей стали диаметром 4 мм. Соединение каждого из электродов с электронной схемой лага выполняется проводом в экранирующей оплетке.
Принципиальная электрическая схема лага представлена на рис. 6.
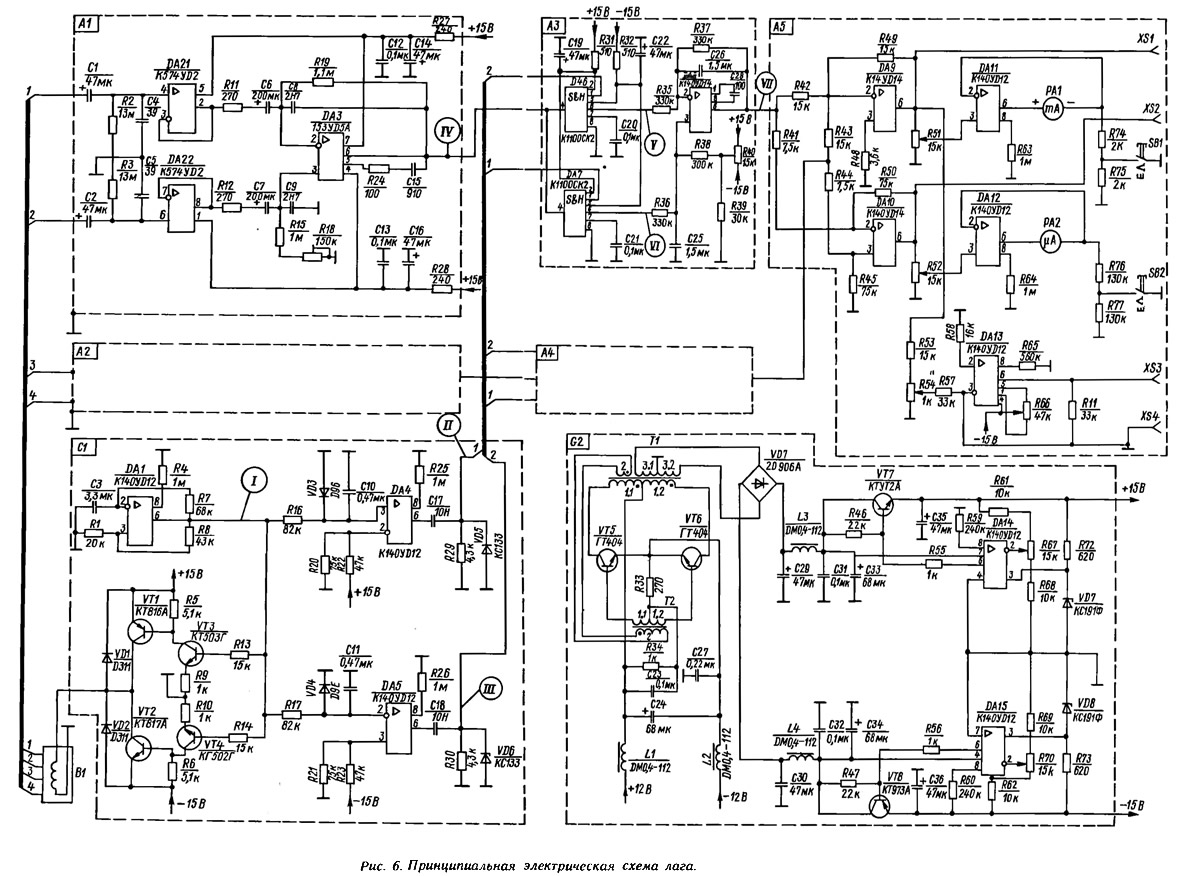
Катушка датчика В1 запитывается прямоугольными импульсами частотой 7 Гц от генератора, собранного на микросхеме DA1. Его нагрузочная способность повышается усилителем мощности, выполненном на транзистоpax VT1—VT4.
Формируемое катушкой переменное магнитное поле в соответствии с законом Фарадея приводит к образованию неравновесных потенциалов на поверхностях электродов датчика в случае относительного перемещения воды. Разности потенциалов, образующиеся на противоположных электродах, усиливаются дифференциальными усилителями A1 и A2, а затем поступают на синхронные детекторы А3 и A4. Схемы выборки и хранения D716 и D717 «запоминают» входные напряжения в момент подачи на них импульсов, формируемых микросхемами DA4 и D715. Благодаря представленной схемотехнической реализации, напряжение на выходе дифференциального интегратора DA8 будет пропорционально только размаху сигнала, поступающего с выхода микросхемы DA3. При этом на его значение не будет влиять дрейф и смещение усилителя.
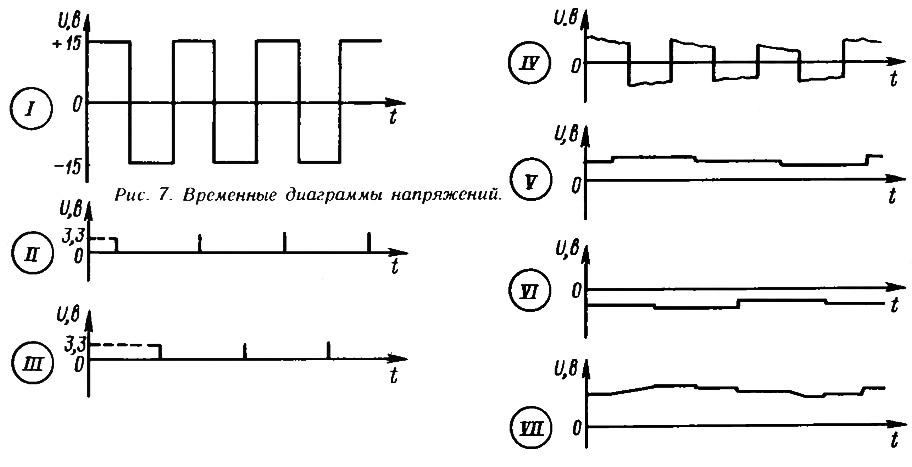
Работу основных функциональных узлов схемы устройства поясняют временные диаграммы напряжений, представленные на рис. 7.
С выходов синхронных детекторов выделенные сигналы поступают одновременно на суммирующий DA9 и разностный DA10 усилители. В случае ориентации осей пар электродов под углом 45° относительно диаметральной плоскости судна напряжение на выходе вычитающего усилителя будет пропорционально скорости дрейфа, а выходное напряжение суммирующего усилителя — пропорционально продольной составляющей вектора скорости судна. Текущие значения ортогональных составляющих скорости регистрируются встроенными в прибор стрелочными индикаторами РА1 и РА2. Диапазон фиксируемых ими значений задается преобразователями «напряжение — ток», собранными на операционных усилителях DA11 и DA12 Установка нужного диапазона измерения продольной скорости осуществляется кнопкой SB1. Для представленных на схеме номиналов элементов и при нажатой кнопке SB1 диапазон измерения составит 0—15 уз, а при отжатой — 0—30 уз. По аналогии при нажатой кнопке SB2 диапазон измерения поперечной скорости судна будет 0—1 уз, а при отжатой — 0—2 узла (для левого и правого борта).
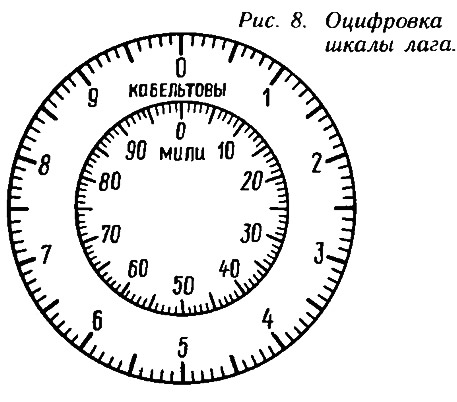
Помимо этого, напряжение с выхода микросхемы DA9 через масштабирующий усилитель DA13 подается на указатель пройденного пути, в качестве которого использован регистратор УНИ-50. Оцифровка его шкалы для указанных на схеме номиналов приведена на рис. 8.
Информация о значении продольной и поперечной составляющих вектора скорости судна может выводиться и на добавочные — дистанционные регистрирующие устройства.
Оптимизацию настройки парусного вооружения яхты может значительно облегчить электронно-оптический индикатор, осуществляющий геометрическое суммирование двух составляющих скорости судна, так как по картинке, наблюдаемой на экране электронно-лучевой трубки, будут четко отслеживаться текущие изменения вектора скорости судна — одновременно и его амплитуды и угла дрейфа яхты.
Схема лага запитывается стабилизированным напряжением ±15 В вырабатываемым блоком питания G2. Он включает преобразователь и стабилизаторы напряжения. Самовозбуждающийся преобразователь напряжения собран на транзисторах VT5 VT6 и двух трансформаторах. Коммутация транзисторов осуществляется при насыщении сердечника переключающего трансформатора Т2, тогда как выходной трансформатор Т1 работает в линейном режиме. Чтобы обеспечить оптимальный режим работы транзисторов VT5 и VT6, они должны быть подобраны с одинаковым коэффициентом передачи h21э.
Трансформатор Т2 выполнен на кольце типоразмера К10X6Х2 из феррита 350ННИ. Его обмотки 1.1 и 1.2 содержат по 8 витков, а обмотка 2 — 16 витков провода ПЭВ-2 диаметром 0,15 мм.
Трансформатор Т1 выполнен на кольце типоразмера К20X12X6 из феррита 1500НМ. Его обмотки 1.1 и 1.2 содержат по 20 витков провода ПЭВ-2 диаметром 0,31 мм. Обмотки 3.1 и 3.2 содержат по 36 витков провода ПЭВ-2 диаметром ∅25 мм а об мотка 2 содержит 8 витков провода ПЭВ-2 диаметром 0,15 мм. При намотке провод следует равномерно распределять по периметру кольца, причем обмотка 1 трансформатора Т2 и обмотки 1 и 3 трансформатора T1 мотаются в два провода.
Реально КПД преобразователя составляет около 90%. При токе нагрузки 0,1 А выпрямленное напряжение на конденсатоpax С29 и С30 должно быть соответственно +20 и —20 В
Двухполярный стабилизатор, собранный на микросхемах DA14 DA15 и транзисторах VT7, VT8, служит для уменьшения амплитуды пульсаций запитывающего датчик напряжения частотой 7 Гц и стабилизации напряжения для питания электронной схемы. Установка величины выходного напряжения осуществляется резисторами R67 и R70.
Для наладки собранного устройства датчик лага опускают в стакан с водой. При неподвиж ном их состоянии осциллографом контролируют амплитуду переменного сигнала частотой 7 Гц на выходе микросхемы DA3, добиваясь максимального подавления синфазного сигнала посредством регулировки схемы подстроенным резистором R18. Затем резистором R40 устанавливают нулевое положение на вы ходе микросхемы DA8. Таким образом достигается настройка обоих каналов — А1, A3 и А2, А4.
Предварительную тарировку указателя продольной скорости и суммирующего регистратора УНИ-50 можно производить на ручье, соорудив своеобразный гидролоток Для этого вдоль продольной оси ручья устанавливают желоб длиной 1—2 м, который должен иметь одинаковое сечение по длине (порядка 100X100 мм) и погружаться в воду так, чтобы величина заглубления лотка у его концов была одинаковой. Точно измерив длину желоба и среднее время перемещения по нему деревянного поплавка, на основании 3—5 замеров рассчитывают скорость тока воды вдоль желоба. Затем посредине желоба устанавливают датчик лага так, чтобы все электроды оказались равномерно погруженными в воду на 1—3 см, а оси пар электродов составляли угол 45° с осью симметрии лотка. Затем при помощи потенциометра R5I приводят в соответствие положение стрелки-указателя с оцифровкой шкалы PA1. Сличая расчетные и фактические показания регистратора УНИ-50 за фиксированный интервал времени, добиваются их совпадения путем поворота потенциометра R54. Резистор R66 обеспечивает установку пороговой чувствительности суммирующего регистратора.
Для уменьшения скорости тока в лотке его следует устанавливать под углом к продольной оси ручья, соблюдая требование одинакового заглубления торцов лотка.
Аналогичным образом производится тарировка указателя скорости дрейфа.
Окончательная тарировка показаний индукционного лага осуществляется по методике, описанной в работе [1] после его штатной установки на судне (теми же потенциометрами).
В лаге использованы постоянные резисторы типа МЛТ, подстроенные резисторы — (типа СП5-2. Конденсаторы C1, С2, С14, С16, С19, С22, С24, С29, С30, С31, С32, С35, С36 типа К53—18; С6, С7 — К50-6, С20, С21 — K73-15B; С3, С25, С26 — К76-4, остальные КМ-66 и КМ-56.
Индикатор РА1 — М4203 0—15В, (из него удален резистор 15к), РА2 — М4206 20—0— 20 μА.
Кнопки SB1 и SB2 — П2К, гнезда Х|S|1÷X|S|4 — любые однополюсные.
Микросхему К574УД2А можно заменить на две микросхемы К140УД8 или К544УД1 с любыми буквенными индексами; К153УДЗ — на микросхему К140УД17. Вместо микросхемы К140УД12 и К140УД14 допустимо применять операционные усилители К140УД6, К140УД8.
Вместо схемы выборки-хранения К1100СК2 можно применить аналоговые ключи, например 190KT2, которые будут управлять процессом заряда конденсаторов хранения, однако при этом потребуется определенное изменение схемы управления ключами.
Диоды VD1—VD4 можно заменить на любые маломощные. Вместо составных транзисторов КТ972А и КТ973А можно использовать включенные по схеме Дарлингтона транзисторы КТ503, КТ817 и КТ502, КТ816 с любыми буквенными индексами.
Вместо регистрирующего прибора УНИ-50 можно применить электромеханический счетчик типа СИ206ХЛ4, включенный последовательно с преобразователем напряжение — частота.
Рекомендуемая литература
- 1. Тараторкин Б. С. Приборы для яхт и катеров. — Л.: Судостроение, 1984 г., с. 78—81.
- 2. Судовые измерители скорости (справочник). Л.: Судостроение, 1978 г.
Примечания
1. Более подробно о принципе работы индукционных лагов можно прочесть в книге «Судовые измерители скорости». — Л.: Судостроение, 1978.