В коротком прогулочном плавании управление катером или яхтой доставляет удовольствие, но если переход длится сутками, работа на руле становится утомительной. Особенно, если экипаж судна малочисленный и курс проложен вдали от берегов.
В этих случаях помощником капитанов малых судов может стать автоматический рулевой, который удерживает судно на заданном курсе без вмешательства человека. На парусных яхтах используются подруливающие устройства, в конструкции которых предусмотрен флюгер. Поставив яхту на нужный курс, закрепляют флюгер по направлению вымпельного ветра. Любое отклонение судна от курса сопровождается поворотом флюгера и связанного с ним механической передачей вспомогательного руля, находящегося в воде. Таким образом судно возвращается на нужный курс. Подробно конструкция подруливающих устройств этого типа описана в «КиЯ» №31 за 1971 г. Они удовлетворительно справляются со своей задачей только в зонах устойчивых по направлению ветров.
Известны конструкции авторулевых на основе гироскопических и гиромагнитных систем, применяемые на флоте, но, к сожалению, такие системы громоздки, дороги, требуют много энергии для своего питания. Сделать такую систему самостоятельно невозможно.
Лет десять назад появились авторулевые, работающие от магнитного компаса. Сигнал об изменении курса давался датчиками, смонтированными на котелке компаса, при повороте картушки и изменении магнитного поля, наводимого магнитами. Авторы попытались сделать такой авторулевой, но убедились в больших недостатках системы. Прежде всего потребовалась существенная переделка котелка компаса, установка датчиков, которые заметно повлияли на девиацию. Причем девиация имела не стабильный характер, а со значительными разбросами. Колебания картушки и ее застой вызывали ложные срабатывания системы и неустойчивое положение судна на курсе.
В предлагаемой конструкции авторулевого мы использовали магнито-модуляционный зонд, который реагирует на величину и направление магнитного поля Земли. Этот принцип хорошо известен и применяется, например, в авиационном дистанционном компасе ИДК-50, элемент датчика которого и был использован в нашей схеме. Прибор осуществляет автоматическое ведение судна по заданному направлению с акустической и оптической сигнализацией отклонений. Его схема позволяет учесть дрейф под влиянием внешних сил, увеличить допустимый угол зарыскивания (уменьшить чувствительность датчика) для более «мягкой» работы при неблагоприятных условиях. При ручном или дистанционном управлении оптические индикаторы авторулевого могут быть использованы для контроля направления движения судна.
Прибор рассчитан на питание от бортовой сети 12—14 В. Ток потребления электронных схем составляет 250—350 мА. Ток, потребляемый сервоприводом рулевого управления, зависит от применяемого электродвигателя; в нашем случае он имеет значения 1—4 А.
Рассмотрим принцип получения сигнала в датчике и его устройство.
Если искусственно вызывать периодическое изменение магнитной проницаемости магнитомягкого материала сердечника зонда, то за счет постоянного магнитного поля Земли в обмотке сердечника будет индуктироваться сигнал, пропорциональный величине поля и косинусу угла между направлениями зонда и вектором напряженности поля. В магниточувствительном элементе магнитная проницаемость изменяется под действием переменного магнитного потока, который периодически насыщает пермаллой сердечника и, следовательно, периодически изменяет (уменьшает) его магнитную проницаемость. При этом изменяется поток, наведенный в пермаллоевом магнитопроводе от поля Земли, и, как следствие, во вторичной обмотке создается электродвижущая сила.
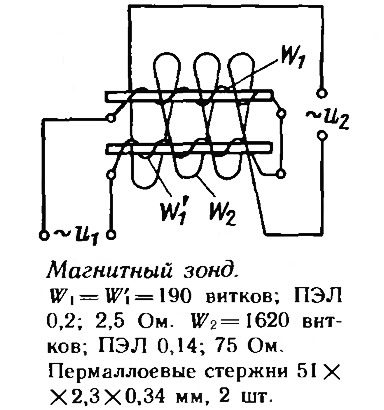
Конструктивно датчик состоит из двух расположенных параллельно пермаллоевых пластинок, на каркасах которых намотаны первичные обмотки с противоположным направлением витков для подачи модулирующих магнитную проницаемость токов. Вторичная выходная обмотка намотана на каркасе, охватывающем обе первичные обмотки. Благодаря этому в выходной обмотке индуцируются ЭДС с противоположными фазами, которые взаимно уничтожаются. ЭДС, образуемая модулированным потоком поля Земли, составляет полезный сигнал и имеет двойную частоту по сравнению с частотой, подводимой к первичной обмотке.
При совпадении направления магнитного меридиана с продольной осью датчика напряжение на вторичной обмотке имеет максимальное значение, зависящее от широты места судна. При повороте датчика вокруг вертикали напряжение убывает и при достижении положения, перпендикулярного магнитному меридиану, равно нулю (что соответствует заданному курсу). При дальнейшем повороте во вторичной обмотке вновь появляется переменное напряжение, но уже обратной фазы. Таким образом, выходной сигнал зависит от направления датчика, т. е. от магнитного курса судна.
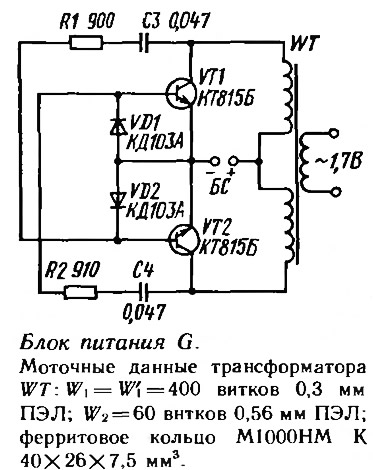
Блок питания обеспечивает подачу переменного напряжения на первичную обмотку датчика в виде импульсов прямоугольной формы частотой 400 Гц и амплитудой 1,7 В. Сигнал во вторичной обмотке датчика, обусловленный внешним магнитным полем Земли, подается на вход электронной схемы.
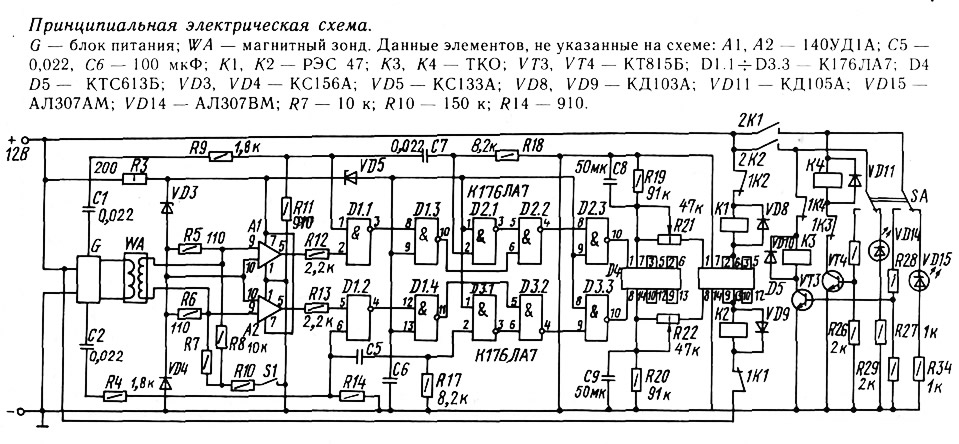
С помощью компаратора, выполненного на операционных усилителях (ОУ), А1, А2, сигнал U2, поступивший с датчика, разделяется на «левый» и «правый». На одном плече компаратора выделяется сигнал U2 положительной полярности, на другом плече сигнал U2 отрицательной полярности. Разделенный сигнал является суммой полезного, по времени совпадающего с фронтом входного импульса, и паразитного, совпадающего по времени с вершинами импульсов напряжения блока питания. Паразитный сигнал необходимо подавить с помощью логических схем.
На одни входы логических ячеек «И-Не» D1.1 и D1.2 подаются сигналы с выхода компараторов, а на другие — дифференцированные сигналы с преобразователя блока питания. Выходные сигналы этих ячеек также с помощью логических ячеек «И-НЕ» D1.3 и D1.4, суммируются с сигналом U2 и инвертируются, в результате получаются отфильтрованные сигналы правого или левого отклонения от курса.
За счет малой амплитуды сигналов от датчика, малой крутизны переднего фронта и недостаточного быстродействия ОУ, реальные управляющие сигналы U ± имеют зону нечувствительности и требуют дополнительной обработки в каждом из двух каналов с помощью дифференцирующей цепи С7 R18 и трех логических ячеек «И-НЕ» D 2.1, 2, 3. На выходах блока логики получаем последовательности импульсов, подаваемые к интеграторам на транзисторной сборке D4.
Благодаря большому коэффициенту усиления транзисторов интеграторов напряжение на том или ином конденсаторе С8, С9 этих интеграторов практически мгновенно достигает амплитудного значения импульсов, выдаваемых блоком логики. Время же разряда конденсаторов задается переменным резистором R21 или R22 и определяет время работы последующих элементов схемы и сервопривода рулевого управления.
С целью устранения одновременного включения управляющих реле К1 и К2 они взаимно блокированы их НЗ контактами. Точность удержания на курсе задается порогом чувствительности схемы, определяемым резисторами R7r R8 и R10 и переключателем S1. При выключенном переключателе S1 погрешность достигает ±1,5°. При включении угол нечувствительности расширяется до 3° в каждую сторону. Это необходимо, если плавание проходит при неблагоприятных погодных условиях с целью сократить число срабатываний реле и мотора привода, которое достигает на пройденном расстоянии 60 миль до 1000 включений.
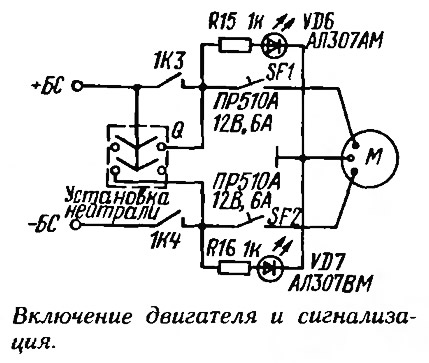
Для компенсации дрейфа от влияния внешних сил, используют два резистора R21 и R22, регулирующих задержку срабатывания раздельно для левого и правого борта, что позволяет установить разное время задержки срабатывания промежуточных реле К1, К2. Переключатель SA «Установка курса» отключает цепи катушек силовых реле К3, К4 и напряжение от реле К1, К2 поступает на оптические индикаторы VD14 и VD15 красного и зеленого цвета для соответствующего борта. Индикаторы установлены в корпусе датчика, что позволяет их использовать и при ручном управлении. При включении разъема «Ручное управление» можно перейти на электрическое дистанционное управление от выносного пульта.
Для установки дистанционного электропривода в нейтральное положение на пульте предусмотрен реверсивный переключатель Q «Установка нейтрали». От возможных перегрузок мотор электропривода защищен двумя тепловыми реле с самовозвратом типа РП510А, рассчитанными на ток до 6 А.
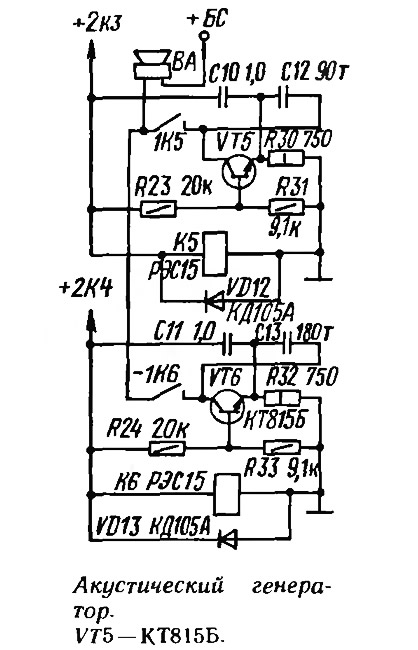
К силовым контактам реле К3, К4 подключен акустический двухтональный генератор, работающий на капсюль ДЭМ4М для сигнализации работы исполнительных механизмов. При включении акустического генератора на выход реле К1, К2, прибор может быть использован в качестве сигнализатора ухода с курса.
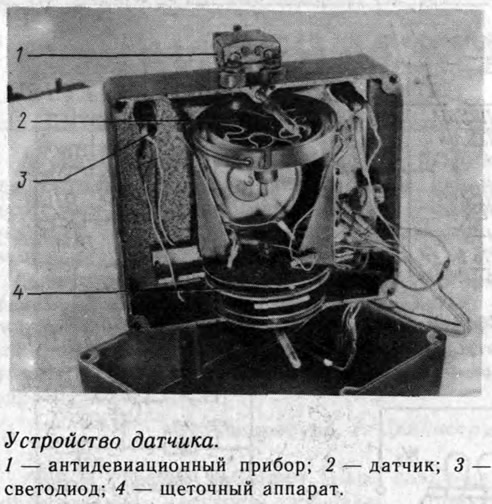
Конструктивно прибор оформлен в двух корпусах из силумина. Датчик установлен в кардановом подвесе для устранения ложного сигнала от вертикальной составляющей магнитного поля Земли. С лицевой стороны расположен лимб установки курса, разбитый на градусы. Вращение ручки лимба передается на платформу карданова подвеса зонда со щеточным аппаратом. На корпусе установлен антидевиационный прибор. Все детали в корпусе датчика и крепеж выполнены из немагнитных материалов. Как и компас, датчик авторулевого должен располагаться вдали от магнитных масс судна.
В другом корпусе расположены блок питания, логическая схема управления, акустический блок, силовые реле и приборы коммутации.
Элементы схемы управления смонтированы на двухсторонней плате с печатным монтажом.
Мы не касаемся в данной статье вопроса об устройстве исполнительного механизма, непосредственно воздействующего на руль или другие органы управления курсом судна, так как применимы различные решения.

- Главная
- Консультации
- Полезные устройства
- 1987 год
- Электронный авторулевой с магнитомодуляционным зондом
Подкатегории раздела
Полезные устройства
Полезные советы
Улучшение судов
Улучшение моторов
Опыт эксплуатации
Техника плавания
Разбор аварий
Рыболовам
Поделитесь информацией
Похожие статьи
Электронный авторулевой «Ауто Хелм»
Электронный тахометр для любого двигателя
Электронный впрыск топлива для мотора глиссера
Звуковой электронный сторож-сигнализатор
Электронный тахометр с растянутыми диапазонами
Полезные мелочи: электронный лаг, кранец, утка, воздушный винт...
Электронный расходомер топлива
Электронный указатель вымпельного ветра
Электронный термометр для лодочного мотора
Простой электронный тестер моториста
Электронный акустический тахометр для подвесного мотора
Электронный тахометр для определения числа оборотов коленвала
Электронный тахометр катеров «Амур-М»
За рубежом: Электронный детектив, Колесо профессора Грима...
Электронный тахометр для любого двигателя
Электронный впрыск топлива для мотора глиссера
Звуковой электронный сторож-сигнализатор
Электронный тахометр с растянутыми диапазонами
Полезные мелочи: электронный лаг, кранец, утка, воздушный винт...
Электронный расходомер топлива
Электронный указатель вымпельного ветра
Электронный термометр для лодочного мотора
Простой электронный тестер моториста
Электронный акустический тахометр для подвесного мотора
Электронный тахометр для определения числа оборотов коленвала
Электронный тахометр катеров «Амур-М»
За рубежом: Электронный детектив, Колесо профессора Грима...
Электронный авторулевой с магнитомодуляционным зондом
Год: 1987. Номер журнала «Катера и Яхты»: 126 (Все статьи)

ПРЕДЫДУЩИЕ СТАТЬИ
Как вывернуть заржавевший болт
Почему не используются паруса Базалло?
Как избавиться от ярких бликов при подсветке компаса
Консультации по моторам «Москва», «Ветерок» и «Чайка»
Ошибки в управлении судами и парусами при шквале
Определить истинное направление пути
Малоизвестный способ съемки с якоря в экстремальных условиях
Как вытащить катер на берег с использованием браги
Рыбацкие хитрости: донка из кофейной тары и грузило
Оверкиль на байдарке на реке Оке
Ядовитые морские животные, которых нужно избегать
Правила парусных гонок: как правильно обойти препятствие и знак
Морские испытания водометного катера «Крым-4»
Катамаран «Каскад» проходит испытания
Пайол из стеклотекстолита для надувной лодки
Почему не используются паруса Базалло?
Как избавиться от ярких бликов при подсветке компаса
Консультации по моторам «Москва», «Ветерок» и «Чайка»
Ошибки в управлении судами и парусами при шквале
Определить истинное направление пути
Малоизвестный способ съемки с якоря в экстремальных условиях
Как вытащить катер на берег с использованием браги
Рыбацкие хитрости: донка из кофейной тары и грузило
Оверкиль на байдарке на реке Оке
Ядовитые морские животные, которых нужно избегать
Правила парусных гонок: как правильно обойти препятствие и знак
Морские испытания водометного катера «Крым-4»
Катамаран «Каскад» проходит испытания
Пайол из стеклотекстолита для надувной лодки
ТЕКУЩАЯ СТАТЬЯ
Электронный авторулевой с магнитомодуляционным зондом
СЛЕДУЮЩИЕ СТАТЬИ
Полезные мелочи: подушка, кокпит, насос, крыльчатка, груша, замок...
Сварная вьюшка для якорного каната
Ремонт резино-тканевых оболочек складных лодок
Как улучшить работу водомета при ходе на волнении?
Удобные универсальные лекала
Несколько вариантов жерлиц для ловли рыбы
Техника старта из воды на виндсерфинге
Правила парусных гонок: Ситуация у знака, на старте и на финише
Гребно-парусный тримаран «Янтарь-турист» — плюсы и минусы
Испытания надувной моторной лодки «Крым-5» с жестким дном
Отзыв о катамаране типа «Гауя» после длительной эксплуатации
Пропитка парусов и тентов раствором пенопласта
Полезные мелочи: люверсы, подпятник, шверц, колесо, бушприт...
Как сделать яхту непотопляемой
Поплавки для надувных катамаранов
Сварная вьюшка для якорного каната
Ремонт резино-тканевых оболочек складных лодок
Как улучшить работу водомета при ходе на волнении?
Удобные универсальные лекала
Несколько вариантов жерлиц для ловли рыбы
Техника старта из воды на виндсерфинге
Правила парусных гонок: Ситуация у знака, на старте и на финише
Гребно-парусный тримаран «Янтарь-турист» — плюсы и минусы
Испытания надувной моторной лодки «Крым-5» с жестким дном
Отзыв о катамаране типа «Гауя» после длительной эксплуатации
Пропитка парусов и тентов раствором пенопласта
Полезные мелочи: люверсы, подпятник, шверц, колесо, бушприт...
Как сделать яхту непотопляемой
Поплавки для надувных катамаранов
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории