
Движители для катеров и моторных лодок
Главным требованием при разработке движителей для любых судов независимо от их размеров и назначения всегда было обеспечение высокой эффективности переработки мощности: при заданной мощности двигателя выбранный движитель должен обеспечивать наибольшую полезную тягу.
В настоящее время это требование приобрело особую актуальность в связи с существенным возрастанием стоимости топлива, расходы на которое почти на 90% определяют экономичность использования создаваемого плавсредства. Для моторных катеров и лодок, равно как и для судов вообще, наиболее эффективными являются гидравлические движители, представляющие собой некоторый лопастной механизм, способный захватывать и отбрасывать назад воду и тем самым создавать тягу. Самыми распространенными гидравлическими движителями являются гребные винты различных конструкций, крыльчатые и водометные движители. В настоящее время можно утверждать, что для скоростных катеров и лодок, эксплуатируемых при скоростях более 70 км/ч, наиболее эффективными являются обычные и специальные (вентилируемые, двухконтурные) водометные движители и суперкавитирующие полностью погруженные или частично погруженные гребные винты. При правильном проектировании всех элементов таких движителей их КПД на больших скоростях составляет 0.60-0.70. Для катеров с умеренными (менее 60 км/ч) и малыми (менее 40 км/ч) скоростями плавания, которые составляют основную часть всего маломерного флота, наиболее эффективным движителем является обычный гребной винт. Следует отметить, что значительное преобладание тихоходных судов среди плавающего маломерного флота обусловлено существенной зависимостью потребной мощности двигателя от скорости. Величина потребной мощности прямо пропорциональна кубу скорости (В=AV3, где А постоянный коэффициент), а для некоторых судов — и более высокой степени, вплоть до V5.
В настоящее время можно с уверенностью утверждать, что до появления новых дешевых источников энергии альтернативы обычному гребному винту и гидравлическим движителям, созданным на его основе (соосные винты, винты в направляющих насадках, водометы и др.), не будет.
При умеренных скоростях плавания КПД обычных гребных винтов равен 0.65-0.75. Однако достижение этой величины может быть обеспечено только при правильном выборе соответствующих корпусу и ожидаемой скорости хода величин диаметра D, шага Р и числа оборотов гребного винта п. Остальные геометрические параметры гребного винта, такие как число лопастей, их площадь, профилировка и форма контура лопасти, геометрия ступицы и т.д., для некавитирующих гребных винтов при умеренных скоростях плавания значительного влияния на коэффициент полезного действия не оказывают. Наиболее существенное влияние на КПД оказывает шероховатость поверхности лопасти. Поэтому с точки зрения эффективности поверхность лопастей должна быть гладкой (шлифованной).
Итак, эффективность переработки мощности при создании конкретного катера (судна) в первую очередь определяется правильным выбором частоты вращения n, диаметра D и соответствующего им шага Р гребного винта для заданной или ожидаемой скорости плавания V. В настоящее время для обоснованного определения указанных величин разработаны обширные технические материалы и методы расчета. В общем можно констатировать, что оптимальное соотношение D, Р, n и V является сугубо индивидуальным для каждого конкретного катера и должно выбираться каждый раз в зависимости от его размеров, принятого двигателя и достижимой скорости хода. При этом для тихоходных судов оптимальное число оборотов винта всегда должно быть меньше, а диаметр гребного винта больше, чем для быстроходных катеров. Однако стремление к снижению числа оборотов и увеличению диаметра гребного винта не всегда может быть реализовано из-за усложнения конструкции редуктора и валопровода, а также размещения гребного винта увеличенного диаметра за корпусом катера или на подвесном моторе. Так например, на подвесных моторах массового производства "Вихрь" и "Москва" основные геометрические элементы штатных гребных винтов выбраны исходя из съема ими полной мощности при скоростях 35-40 км/ч. При движении на меньших скоростях эти гребные винты становятся гидродинамически тяжелыми, и при скоростях менее 20 км/ч двигатель не может развить полную мощность. При больших скоростях (17>40 км/ч), напротив, штатный гребной винт становится гидродинамически легким, и двигатель недогружен. Поэтому фирмы, производящие подвесные моторы, как правило, выпускают два дополнительных гребных винта с измененным шагом — для малых и больших скоростей. Однако это лишь частично улучшает тяговые характеристики установки, поскольку принятое на этих подвесных моторах соотношение диаметра и числа оборотов гребного винта является оптимальным только для скоростей 35-40 км/ч. При меньших скоростях для более эффективной переработки мощности число оборотов необходимо уменьшить, диаметр гребного винта увеличить. Ясно, что для указанных подвесных моторов эта задача практически неразрешима, как с точки зрения размещения гребного винта увеличенного диаметра, так и установки дополнительного редуктора. Для этого пришлось бы разрабатывать новую конструкцию подвесного мотора.
Устройство винта
Оригинальную конструкцию движителя разработал и запатентовал известный любитель Б.К. Шаранков (Авторское свидетельство № 433064 от 25.01.71). Автор фактически предложил новую конструкцию лопастного механизма (гребного винта) увеличенного диаметра, совмещенного с понижающим обороты редуктором. Важным преимуществом этой конструкции является простота ее установки на подвесном моторе взамен штатного гребного винта и редуктора, крепящихся на двух болтах. Разумеется, при установке винта Шаранкова существенно увеличивается подводный габарит подвесного мотора, что создает определенные трудности при плавании на мелководье.
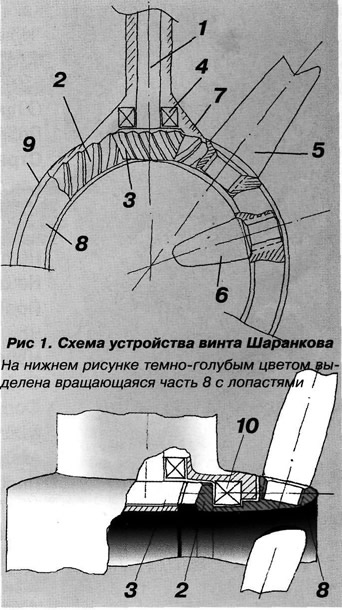
Рассмотрим подробнее конструкцию гребного винта Шаранкова на примере реальной конструкции (рис. 1).
Профилированная кольцевая насадка (9) состоит из задней неподвижной части (7) и передней подвижной части (8) с закрепленными на ней лопастями-лопатками (5, 6). Передняя подвижная часть соединяется с неподвижной кольцевым радиально-упорным подшипником (10). Вместе они образуют сопло, имеющее в меридиональных сечениях аэродинамическую форму профиля крыла. Профилировка может быть различной — симметричной и несимметричной, в зависимости от модификации гребного винта, выбор которого, в свою очередь, зависит от требуемой скорости судна и мощности силовой установки.
В описываемой конструкции используется авиационный несимметричный профиль с относительной толщиной 0.13. Средний диаметр по хорде кольцевой насадки-сопла составляет 42% диаметра винта, длина сопла по хорде составляет 34% диаметра винта. В плоскости профиля, между передней подвижной и задней неподвижной частями его размещается механизм привода винта, состоящий из шестерни (3) и радиально-упорного подшипника (4), воспринимающего осевой упор и окружное усилие винта при работе. На шлицы штатного вала (1) подвесного мотора насажена венцовая зубчатая шестеренка (3) со спиральным зубом, находящаяся в зацеплении с шестерней (2), передающей крутящий момент от двигателя на подвижную часть кольцевой насадки (8) с установленными на ней лопастями-лопатками.
Шаранковым было спроектировано и изготовлено несколько конструкций таких движителей для различных катеров, включая и катер на подводных крыльях. По данным автора, катер на крыльях легко преодолевал "горб" сопротивления и выходил на крыло, обеспечивая ожидаемую скорость хода. Неизменно положительным оказывался результат применения винта Шаранкова и в других случаях, в особенности на тяжелых тихоходных лодках, предназначенных для перевозки грузов.
Однако трудности измерения на катерах в реальных условиях упора, потребляемой мощности и даже скорости хода не позволяли достоверно оценить гидродинамические качества движителя предлагаемой конструкции. Необходим был точный лабораторный эксперимент. В 1992 г. в опытовом бассейне ЦНИИ им. акад. А.Н. Крылова были выполнены испытания одной из реальных конструкций гребного винта.
Для их проведения был взят гребной винт Б.К.Шаранкова со следующими характеристиками:
| Диаметр D, мм | 410 |
| Число внешних лопаток z1 | 6 |
| шаг Н1, мм | 660 |
| Число внутренних лопаток z2 | 9 |
| шаг Н2, мм | 880 |
| Диаметр кольцевой насадки-сопла: | |
| внутренний DB, мм | 157 |
| наружный DH, мм | 195 |
| Длина насадки L, мм | 120 |
| Дисковое отношение AЕ/A0 | 0.25 |
При этом для проведения испытаний на штатной установке опытового бассейна неподвижная и вращающаяся части кольцевой насадки были жестко соединены, а в центре сопла с опорой на лопатки установлена обычная ступица диаметром 40 мм. В результате при испытаниях вращалась вся конструкция целиком. Поэтому потери на трение вращающего сопла-насадки возрастали, а потери на трение в радиально-упорном подшипнике и зубчатой передаче не учитывались. Появились дополнительные потери на обтекание установленной в центре насадки-сопла ступицы. Поскольку указанные обстоятельства вносят незначительные изменения в крутящий момент и противоположны по знаку, погрешность измерения гидродинамических характеристик винта Б.К. Шаранкова в лабораторных условиях была невелика.
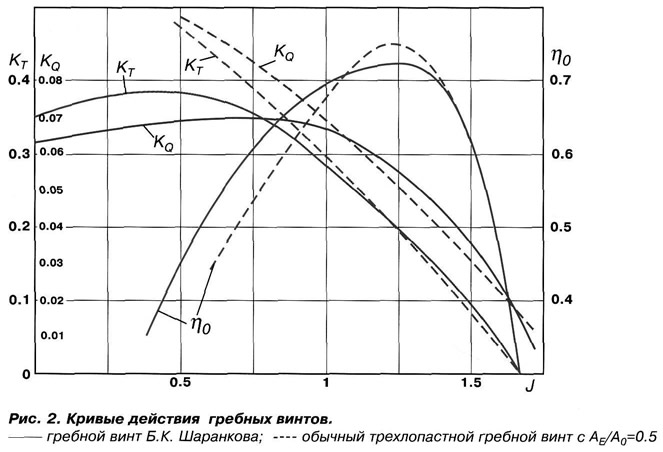
При испытаниях измерялись упор Т и момент Q, действующие на винт, а также скорость движения V и число оборотов п. В процессе испытаний скорость и число оборотов варьировались в необходимых для получения всех режимов работы пределах: от швартовного до поступи нулевого упора. По результатам испытаний были получены стандартные кривые зависимости безразмерного коэффициента упора: KT=T/ρn2D4 и момента: KQ=Q/ρn2D5 от относительной поступи гребного винта J=V/nD, где Т — упор в кг, Q — момент в кгм, n — число оборотов в секунду, D — диаметр в м, ρ=102 кг·с2/м4 — массовая плотность пресной воды, V — скорость движения в м/с. Соответствующие кривые КT, KQ и КПД гребного винта η0=KTJ/ 2πКQ приведены на рис. 2. Здесь же пунктирной линией показаныкривые действия обычного трехлопастного гребного винта с дисковым отношением АЕ/А0=0.5, обеспечивающего вблизи максимума КПД тот же упор, что и винт Б.К. Шаранкова.
Как видно из рис. 2, характер изменения КT и KQ от поступи J винта Шаранкова существенно другой, чем у обычного гребного винта. Значения КT и KQ у этого винта, вследствие особенностей его обтекания, начиная с поступей J=1.0 и до швартовного режима J=0, практически не изменяются, в то время как для обычного гребного винта они увеличиваются почти по линейному закону.
Такой характер изменения кривых действия гребного винта скорее всего обусловлен ускорением и закручиванием потока внутри насадки-сопла и отрывным обтеканием наружных лопаток при приближении к швартовному режиму.
Вследствие этого гребной винт Б.К. Шаранкова менее чувствителен к изменению режима его работы и способен снимать полную мощность двигателя практически на всех скоростях хода от полной до швартовного режима, что в некоторой степени сближает его с винтом регулируемого шага.
Коэффициент полезного действия η0 такого гребного винта на расчетном режиме (вблизи η0=max) близок к КПД обычного гребного винта.
Для более полного сопоставления тяговых характеристик предлагаемого движителя была рассчитана его стандартная паспортная диаграмма применительно к установке на подвесном моторе "Вихрь-30", которая приведена на рис. 3.
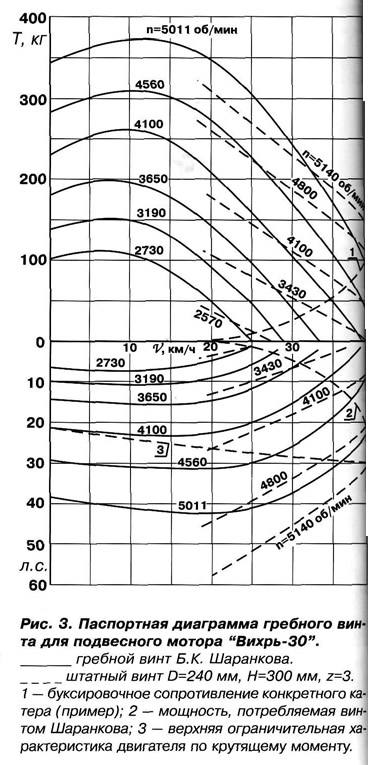
В верхней части диаграммы даны кривые изменения упора Т, создаваемого гребным винтом, от скорости движения V при заданных постоянных оборотах на маховике двигателя, а в нижней части такие же кривые снимаемой гребным винтом мощности. Для сравнения на диаграмме пунктирными линиями проведены аналогичные кривые для штатного гребного винта подвесного мотора "Вихрь-30". Как видно из рисунка, при заданных оборотах двигателя зависимость снимаемой гребным винтом Шаранкова мощности от скорости более слабая, чем для обычного гребного винта, что особенно важно для катеров на подводных крыльях при преодолении горба сопротивления.
Для сравнения эффективности этого и обычного гребного винта ниже в таблице для четырех скоростей хода даны величины максимальной снимаемой с мотора "Вихрь-30" мощности и КПД движителя.
Из таблицы видно, что применение на моторе "Вихрь-30" гребного винта Б.К. Шаранкова позволяет снимать полную мощность двигателя без его перегрузки по моменту на всех скоростях хода от швартовного режима до 40 км/ч. Штатный гребной винт не позволяет снимать с двигателя полной мощности при скоростях, меньших 30 км/ч.
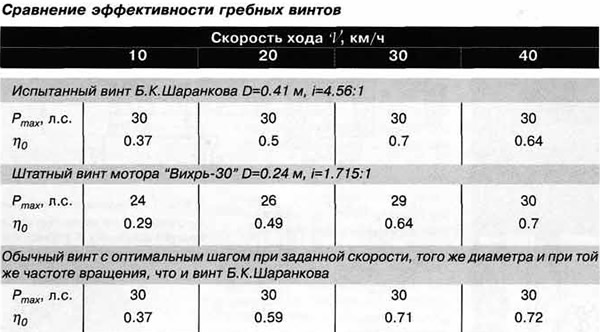
Именно на малых скоростях благодаря снижению числа оборотов и увеличению диаметра гребной винт Шаранкова обеспечивает более высокий КПД по сравнению со штатным гребным винтом.
На скорости 40 км/ч, для которой спроектирован штатный гребной винт, более высокий КПД обеспечивается именно этим винтом.
Информация об изображении
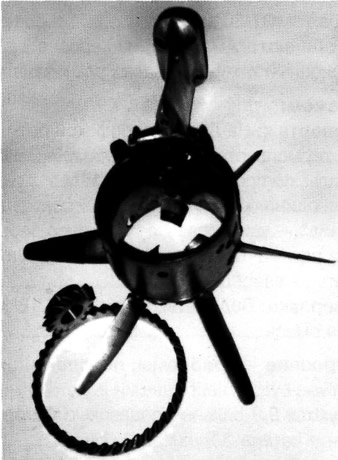
Для проведения эксперимента конструкция винта Шаранкова была несколько изменена
Еще более высокий КПД можно было бы обеспечить обычным гребным винтом за счет изменения конструкции мотора и редуктора при снижении оборотов до той же величины, что и на винте Б.К. Шаранкова. Из сравнительной таблицы видно, что в этом случае обычный гребной винт при скорости 20 км/ч обеспечивает на 15% больший КПД по сравнению с винтом Шаранкова. На больших скоростях V>30 км/ч КПД всех сравниваемых винтов почти одинаковы.

Для проведения эксперимента конструкция винта Шаранкова была несколько изменена
Подводя итог, можно констатировать, что разработанная Б. К. Шаранковым конструкция гребного винта, совмещенная с понижающим обороты редуктором, является довольно удачной и может существенно увеличить эффективность подвесных моторов серийного производства при использовании их на тяжелых тихоходных (V<20 км/ч) лодках или паромах, а также на быстроходных катерах на крыльях для выхода на крыло.
Хотя изготовление такого типа движителя достаточно трудоемко, простота замены штатного гребного винта подвесного мотора на винт Шаранкова и значительная экономия топлива во многих случаях делают его применение рациональным. При использовании на катере стационарных двигателей целесообразно применение надлежащим образом спроектированного обычного гребного винта. Следует отметить, что изготовленные Б.К. Шаранковым гребные винты, в том числе и испытанный в лабораторных условиях, оптимизированы не по всем геометрическим параметрам. Передаточное число встроенного в винт редуктора и диаметр винта, а также расположение и шаг лопастей в зависимости от условий эксплуатации конкретного катера и ожидаемой скорости его хода могут быть дополнительно оптимизированы.
В заключение необходимо еще раз подчеркнуть, что эффективность гребного винта больше всего зависит от правильного выбора частоты вращения и диаметра, а также соответствующего им шага в зависимости от размеров корпуса катера и ожидаемой скорости плавания. Число лопастей, их контур и профилировка, в особенности для катеров с малыми скоростями, существенного влияния на КПД не оказывают. Для выбора оптимальных соотношений D, n и Р при заданной скорости V в настоящее время разработаны обширные технические материалы и методы расчета.
Несколько слов о судьбе изобретения и его авторе
Борис Константинович Шзранков в настоящее время проживает в г. Волхов Ленинградской области.
Он самостоятельно проектирует и изготавливает гребные винты для маломерных судов с середины 50-х. Размышляя о возможных путях повышения эффективности движителей, Ша-ранков изучал специальную литературу, в том числе историческую. Однажды в его руки попали труды А.Ф. Можайского. В послании Главному инженерному управлению, датированном февралем 1887 г., Шаранков встретил заинтересовавший его абзац: "...Исследовать и приискать наилучшую форму винта двигателя аппарата в отношении числа перьев или лопастей его, изгиба их, или угла с валом. Отыскать наиболее выгодную величину площади винта в отношении двигающей его силы, диаметр его. Так как нижняя площадь перьев винта не дает полезной работы, то, понемногу вырезая ее, определить наивыгоднейшую величину выреза покрышки винта около вала."
Так великий русский изобретатель определял в конце прошлого столетия первоочередные шаги в изучении аэродинамики движителей летательных аппаратов, которые предстояло сделать ученым и конструкторам, работавшим на рубеже 19 и 20 веков. И именно эта фраза, по признанию Бориса Константиновича, подсказала ему довольно интересное решение вопроса о повышении эффективности гребного винта — не просто "вырезать понемногу" корневые участки лопастей, но и полностью исключить осевую ступицу из конструкции движителя. Для проверки справедливости собственных предположений Шаранков в 1968 году самостоятельно изготовил первый винт, параметры которого подобрал интуитивно (электромеханик по профессии, Борис Константинович не имел специального судостроительного образования, но был заядлым водномоторником-любителем). К слову, лопасти для своих винтов Шаранков вытачивает самостоятельно на токарном станке.
К сожалению, первые по-настоящему корректные испытания новой конструкции винта удалось провести только спустя четверть века (несмотря на то, что авторское свидетельство было получено в начале 70-х). Автор изобретения выражает благодарность В.К. Турбалу и другим сотрудникам ЦНИИ им. акад. Крылова, оказавшим помощь в проведении эксперимента и определении характеристик нового гребного винта.