Прочел вашу статью ("КиЯ" №152) о проблемах плавсредств с педальным приводом и сразу понял, что мое изобретение более всего подходит для этих целей. Поэтому хочу, чтобы вы срочно (лето на носу) опубликовали мою статью под названием "Желаете установить мировой рекорд?".
Не спешите смеяться над этим кажущимся авантюрой заявлением. Я более, чем реалист, и твердо уверен в своей интуиции. К тому же, проведенные опыты дали прекрасные результаты.
Из вашей статьи стало известно, что максимальная скорость, достигнутая на аппарате с подводными крыльями и педальным приводом равна 6.5 м/с (23.4 км/ч). Я согласен с доцентом В. Жинкиным, что вряд ли удастся "выжать" из этой конструкции большого прироста скорости.
Предлагаю энтузиастам изготовить педальную лодку — ротоплан моей конструкции и думаю, что побить рекорд иностранцев удастся без особого труда.
Конструкция очень проста, но потребует тщательного расчета и подбора всех параметров. Я бы сам "склепал" ее за неделю, но на полярной станции, где работаю, нет, к сожалению, подходящих материалов. А время не ждет!
Судостроительные кооперативы смогли бы без особых затрат выпускать такой водный велосипед, который явился бы прекрасным снарядом для отдыха на воде, а в будущем, возможно, и для спорта — вплоть до Олимпийских игр. Малый вес аппарата, возможность одному человеку катить его по суше, большая скорость передвижения (до 30 км/ч) найдут горячих поклонников такого средства передвижения. Ну а мировой рекорд послужит хорошей рекламой вашей продукции и моему изобретению, которое в настоящий момент патентуется.
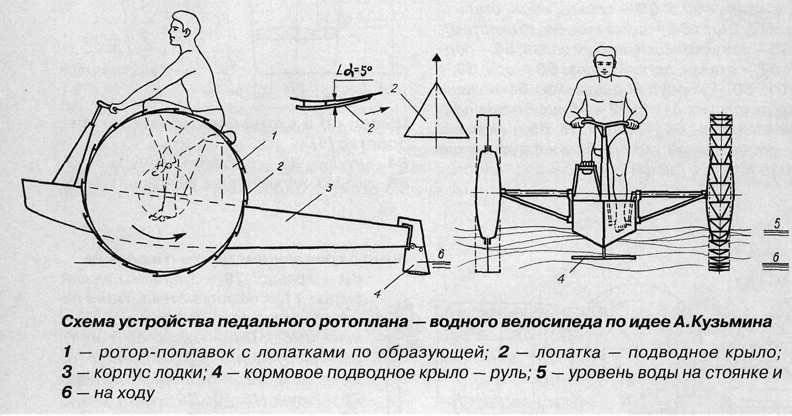
Тем, кто захочет построить водный велосипед-ротоплан, разъясняю принцип действия. В состоянии покоя корпус лодки лежит на воде, роторы на одну третью часть погружены в воду. При работе педалями роторы начинают вращаться. Установленные на них под углом 5-10° к водному потоку треугольные лопатки — дельтавидные подводные крылья — создают подъемную силу, которая поднимает корпус аппарата над водой. Сила сопротивления лопаток как лопастей гребного колеса заставляет двигаться вперед.
На ходу аппарат опирается на три "точки" — нижние лопатки роторов и кормовое опорное крыло, стойка которого играет роль руля управления.
Вся сложность проблемы заключается в том, чтобы подобрать оптимальное соотношение диаметра ротора, площади лопаток, угла их установки, числа оборотов роторов. Потребуются, видимо, эксперименты.
Для ориентировки рискну посоветовать следующие начальные параметры. Диаметр роторов 1.4-1.6 м.
Лопатки — треугольной формы со стороной 200 мм, возможно меньшей толщины; угол атаки — 5°. Крепление лопаток на экспериментальном аппарате должно обеспечивать регулировку установочного угла атаки. В перспективе возможно понадобится создание более сложной конструкции с изменяемым на ходу углом атаки.
Число оборотов должно быть таким, чтобы при движении на полной скорости аппарат не проваливался в воду. Нужно учесть, что торможение очень интенсивное и может привести к опрокидыванию через нос.
На рисунке показан простейший привод; для рекордного заезда понадобится, видимо, передача, позволяющая изменять число оборотов роторов.
Роторы надо сделать пустотелыми или с пенозаполнителем, чтобы они играли роль поплавков на стоянке.
При работе этой простой конструкции происходят сложные процессы, не видимые на первый взгляд. Тот, кто поймет все тонкости, сможет по достоинству оценить преимущества моего изобретения.

- Главная
- Проекты
- Прочие проекты
- 1996 год
- Педальный водный велосипед-ротоплан
Подкатегории раздела
Парусные яхты
Парусные катамараны
Парусные тримараны
Моторные лодки
Катера
Туристические суда
Рыболовные суда
Виндсерфинги и лыжи
Прицепы и трейлеры
Прочие проекты
Поделитесь информацией
Похожие статьи
Новый водный велосипед «Янтарь»
Водный велосипед с оригинальным водометным движителем
Водный велосипед на подводных крыльях «Трампофойл»
Ротоплан механика Кузьмина
Сообщения: катамаран, велосипед, «Меркьюри», фантазия, везение...
За рубежом: весла, каравеллы, «Фаудроант», велосипед, слалом...
Велосипед-амфибия с надувными поплавками
Педальный привод на гребной винт лодки
Усовершенствованный педальный привод
Сообщения: адмирал, реликвия, памятник, колокол, реклама, велосипед, кругосветка...
Педальный одноместный катамаран «Аквапед»
Скоростной однороторный ротоплан «Марлин»
Легкий и простой по конструкции катер «водный пикап»
Двухкорпусный двухместный надувной водный мотоцикл
Водный велосипед с оригинальным водометным движителем
Водный велосипед на подводных крыльях «Трампофойл»
Ротоплан механика Кузьмина
Сообщения: катамаран, велосипед, «Меркьюри», фантазия, везение...
За рубежом: весла, каравеллы, «Фаудроант», велосипед, слалом...
Велосипед-амфибия с надувными поплавками
Педальный привод на гребной винт лодки
Усовершенствованный педальный привод
Сообщения: адмирал, реликвия, памятник, колокол, реклама, велосипед, кругосветка...
Педальный одноместный катамаран «Аквапед»
Скоростной однороторный ротоплан «Марлин»
Легкий и простой по конструкции катер «водный пикап»
Двухкорпусный двухместный надувной водный мотоцикл
Педальный водный велосипед-ротоплан
Год: 1996. Номер журнала «Катера и Яхты»: 160 (Все статьи)
ПРЕДЫДУЩИЕ СТАТЬИ
Швертбот «Радиус-4,8» для гонок и развлечений
Классический 20-футовый кэтбот «Тэбби Кэт»
Простая деревянная лодка-скиф для дачи и рыбалки
Мини-мотолодка для морского туризма «Балтик»
Стальная крейсерско-гоночная яхта «Жигули-26РТ»
Гоночная микро-яхта «Со-Ду-Ит!» для открытого океана
Сверхмалая яхточка длиной 3,5 метра
Крейсерский швертбот «Дюйм» класса Т2
Необычные проекты парусников Евгения Xабарина
Прогулочно-туристский катер-яхта «Катран»
Яхта «Макси»-класса для кругосветных гонок
Секционная туристическая лодка «Анаконда»
Автомобильная кар-топ моторная лодка
Стальной прогулочно-экскурсионный катер
Съемное парусное вооружение для гребной лодки «Пелла»
Классический 20-футовый кэтбот «Тэбби Кэт»
Простая деревянная лодка-скиф для дачи и рыбалки
Мини-мотолодка для морского туризма «Балтик»
Стальная крейсерско-гоночная яхта «Жигули-26РТ»
Гоночная микро-яхта «Со-Ду-Ит!» для открытого океана
Сверхмалая яхточка длиной 3,5 метра
Крейсерский швертбот «Дюйм» класса Т2
Необычные проекты парусников Евгения Xабарина
Прогулочно-туристский катер-яхта «Катран»
Яхта «Макси»-класса для кругосветных гонок
Секционная туристическая лодка «Анаконда»
Автомобильная кар-топ моторная лодка
Стальной прогулочно-экскурсионный катер
Съемное парусное вооружение для гребной лодки «Пелла»
ТЕКУЩАЯ СТАТЬЯ
Педальный водный велосипед-ротоплан
СЛЕДУЮЩИЕ СТАТЬИ
Гоночная килевая яхта Л-60
Автомобильная мотолодка-картоп «Воронеж-мини»
Три варианта восстановления лодки типа «фофан»
Парусно-моторная яхта по проекту «Бриз»
Крейсерская яхта с корпусом из легкого сплава «Джелинайт»
Армоцементная яхта «Хэппи Бэби V»
Постройка двухмачтового швертбота типа «Дрэскомб Логгер»
Мореходная моторная лодка «Радуга-50»
Скоростная двухместная кар-топ мотолодка «Супербесенок»
Яхта-тендер «Анастасия» шведского мастера Чапмена
Двухсекционная прогулочная мотолодка под «Вихрь»
Катер с автомобильным трейлером для активного отдыха
История постройки ладожской соймы - мореходной парусной лодки
Швертбот-плавдача на базе «Ската»
Забытый вариант «моторки» — автобот
Автомобильная мотолодка-картоп «Воронеж-мини»
Три варианта восстановления лодки типа «фофан»
Парусно-моторная яхта по проекту «Бриз»
Крейсерская яхта с корпусом из легкого сплава «Джелинайт»
Армоцементная яхта «Хэппи Бэби V»
Постройка двухмачтового швертбота типа «Дрэскомб Логгер»
Мореходная моторная лодка «Радуга-50»
Скоростная двухместная кар-топ мотолодка «Супербесенок»
Яхта-тендер «Анастасия» шведского мастера Чапмена
Двухсекционная прогулочная мотолодка под «Вихрь»
Катер с автомобильным трейлером для активного отдыха
История постройки ладожской соймы - мореходной парусной лодки
Швертбот-плавдача на базе «Ската»
Забытый вариант «моторки» — автобот
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев
Barque.ru © 2013 | Контакты | Карта сайта | Мобильная версия
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории
Судостроение: Парусные суда Моторные суда Технологии Экранопланы
Моторы: Описание моторов Устройство моторов Самодельные моторы Тюнинг моторов Обслуживание моторов Дистанционное управление
Проекты: Парусные яхты Парусные катамараны Парусные тримараны Моторные лодки Катера Туристические суда Рыболовные суда Виндсерфинги и лыжи Прицепы и трейлеры Прочие проекты
Спорт: Новости спорта Парусные соревнования Водномоторный спорт Воднолыжный спорт Виндсерфинг Буерные соревнования Соревнования туристов
Консультации: Полезные устройства Полезные советы Улучшение судов Улучшение моторов Опыт эксплуатации Техника плавания Разбор аварий Рыболовам
Кругозор: Новые суда и устройства Интересные события Интересные факты Интервью Карты и маршруты Официальные данные Проблемы малого флота Яхт-клубы и стоянки Письма в редакцию
Истории: Путешествия Туристические походы Знаменитые корабли Военная страничка Литературная страничка История флота Прочие истории