
Владельцы по-разному организуют управление этим вспомогательным мотором, поскольку универсальной схемы, пожалуй, не существует. Наиболее распространенным и самым дешевым является простейшее румпельное управление. Мотор фиксируется в прямолинейном положении на выносном транце судна. Частота вращения винта выбирается постоянной в зависимости от требуемого режима движения, после чего тяга управления газом тоже фиксируется соответствующим приспособлением на румпеле. Роль пера руля в данном случае выполняет подводная часть основного двигателя, который находится в опущенном состоянии. Таким образом, судоводитель имеет возможность управлять поворотом судна, непосредственно поворачивая рулем основной двигатель. Очевидные недостатки этой схемы:
- невозможность изменять режим работы вспомогательного мотора (газ/реверс);
- создание дополнительного сопротивления движению и ухудшение проходимости по мелководным участкам из-за опущенной подводной части основного двигателя.
Значительно более комфортно чувствует себя судоводитель, используя вспомогательный мотор с дистанционным управлением газом/реверсом. Наличие контроллера под рукой позволяет быстро реагировать на изменение ситуации, соответственно меняя режим движения судна.
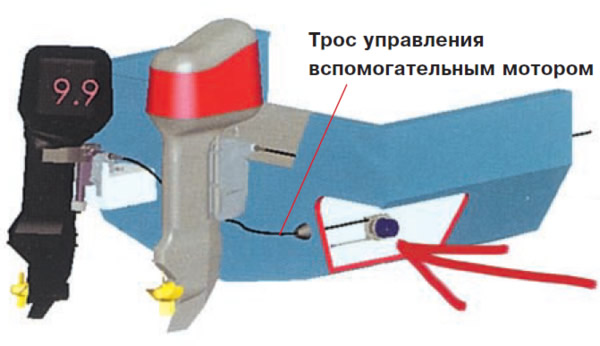
Ну и, наконец, самым цивилизованным способом управления катером при движении под вспомогательным мотором является тот, при котором основной двигатель поднят над водой, а управление полностью осуществляется за счет вспомогательного. Технически это наиболее сложная задача, поскольку для традиционной схемы управления поворотом требуется рулевой трос с редуктором, а тому, в свою очередь, нужна рулевая консоль. Согласитесь, что катер с двумя рулевыми консолями выглядит, по меньшей мере, странно, не говоря уже о потерянном полезном пространстве, которое эта конструкция будет занимать.

Удачным решением данной проблемы явилось создание канадскими инженерами рулевого редуктора с электрическим приводом. Конструктивно все достаточно просто. Вместо рулевого колеса на вал редуктора через понижающую передачу смонтирован электродвигатель постоянного тока. При подаче электропитания той или иной полярности редуктор толкает рулевой трос в соответствующую сторону, а при отсутствии питания он фиксируется в выбранном положении электромагнитной защелкой. Управление редуктором осуществляется с переносного дистанционного пульта на гибком кабеле, который размещается рядом с судоводителем. Таким образом, судоводитель может управлять поворотом вспомогательного мотора, даже не находясь непосредственно у главной рулевой консоли. Сам редуктор с электроприводом не занимает много места и может быть размещен в любой подходящей нише корпуса или подпалубного пространства судна. В качестве единственного недостатка этой схемы управления можно отметить невысокую скорость поворота вспомогательного двигателя. Время его полной перекладки с борта на борт — около 15 секунд, что определяется малой мощностью электродвигателя.
Описанный комплект управления вспомогательным мотором можно приобрести в компании "ТЕХНОМАРИН", которая предлагает широкий ассортимент различных рулевых систем для маломерных судов.