
Автором разработан специальный ультразвуковой прибор, в котором используется доплеровский эффект1. Прибор позволяет оценивать изменение скорости яхты по цифровым данным. Он состоит из двух частей: передатчика с ультразвуковым излучателем — пьезоэлектрическим преобразователем, который может быть закреплен на буе тренировочной дистанции либо на тренерском катере, и приемника, устанавливаемого на настраиваемой яхте. Излучатель передатчика имеет круговую диаграмму направленности, что позволяет принимать его сигналы фиксированной частоты f0 в радиусе до 5000 м.
Структурная схема прибора приведена на рис. 2. Кварцевый генератор передатчика 1 и гетеродин 11 приемника настраивают на одну фиксированную частоту. Ультразвуковые колебания, излучаемые пьезоэлектрическим преобразователем 3 передатчика, принимает преобразователь 4 приемника; здесь они вновь преобразуются в электрический сигнал, который затем усиливается в усилителе 5 и подается в смеситель 6. Сюда же из гетеродина 11 поступает сигнал фиксированной частоты, на которую настроен прибор.
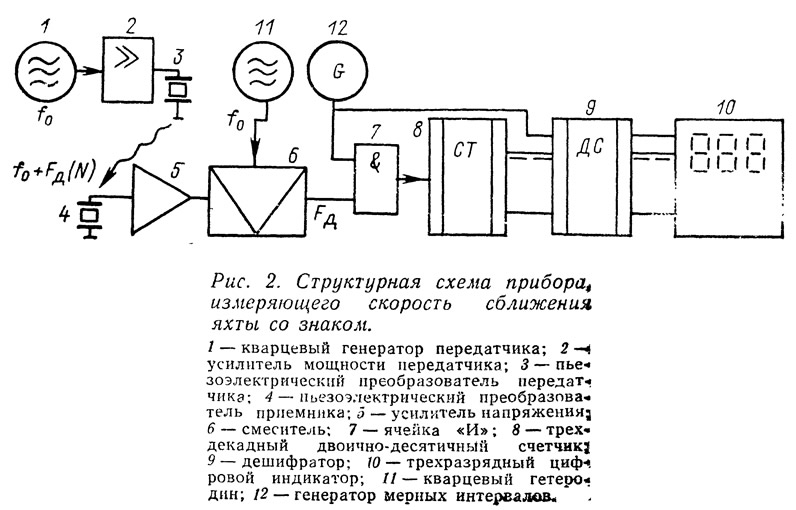
Смеситель «выдает» сигнал, частота которого равна сдвигу частот — разности фиксированной частоты и частоты сигнала, поступившего на преобразователь 4.
Генератор 12 формирует измерительный интервал (времени), необходимый для отсчета скорости изменения сдвига частот. Ячейка 7, счетчик 8 и дешифратор 9 преобразуют электрические сигналы в цифровые показания на индикаторе 10. Если прибор настроен на фиксированную частоту 150 кГц, а измерительный интервал составляет 1 секунду, то сдвиг частоты в 1 Гц соответствует изменению скорости на 1 см/с, а отсчет цифрового индикатора равен доплеровскому сдвигу.
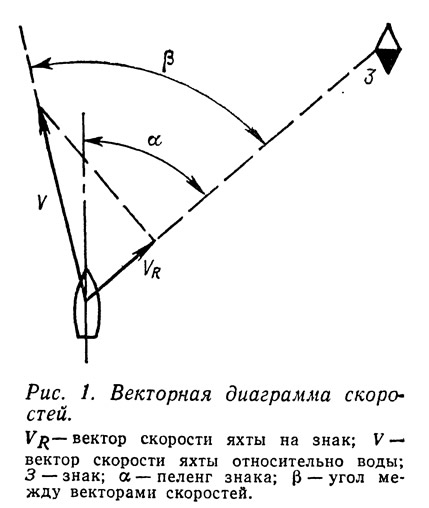
Теперь обратимся к рис. 1. иллюстрирующему принцип замера скорости сближения яхты (приемника) с буем (передатчиком). При движении яхты относительно буя излучаемый передатчиком сигнал достигает приемника с доплеровским сдвигом частоты Fд, пропорциональным проекции вектора скорости яхты V на направление — пеленг на буй
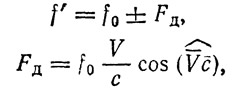
где V — скорость сближения яхты с буем; с — скорость распространения звука в воде.
При отсутствии течения скорость сближения яхты с буем можно определять по формуле
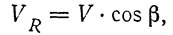
где β — угол между вектором скорости яхты (с учетом дрейфа) и направлением на буй.
Аппаратурная погрешность работы прибора зависит от погрешности работы кварцевых генераторов и составляет примерно 0,1 %. Погрешность за счет разброса скорости звука не превышает 1 %, однако отношение скоростей яхты относительно воды и знака всегда остается постоянным.
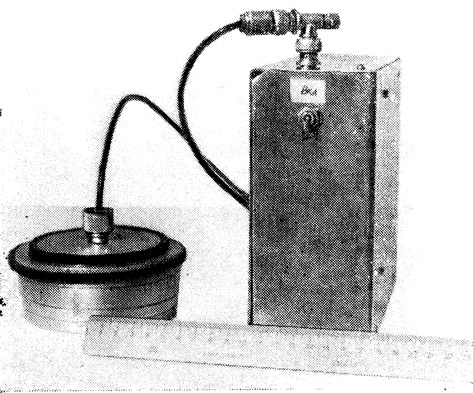
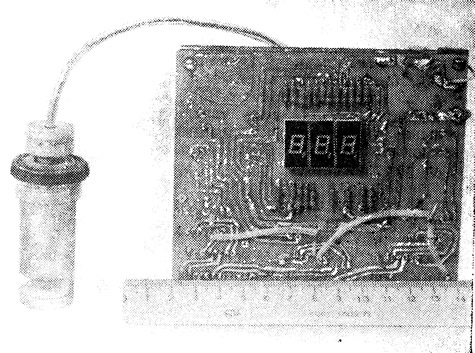
По рассмотренной структурной схеме был изготовлен экспериментальный образец прибора, работающий на частоте 136 кГц. Вес приемника составил около 300 г, передатчика — около 900 г. Прибор прошел испытания на Волге и Черном море в районе Сочи. Кроме него, на яхте был установлен ультразвуковой доплеровский лаг2. Он работает по тому же принципу, что и описанный прибор, но имеет более сложную структурную схему.
Таким образом, на яхте, оборудованной описанным прибором и лагом, тренирующийся гонщик располагает цифровыми данными сразу двух параметров: скоростью движения яхты относительно воды и скоростью сближения яхты со знаком. По этим значениям и их соотношению можно судить о крутизне хода и результатах настройки яхты, выбирать оптимальный курс, регистрировать распределение течений по дистанции и их изменение в зависимости от погодных условий.
Примечания
1. Эффект Доплера — изменение частоты колебаний (звуковых, электромагнитных), наблюдаемое при движении их источника относительно приемника. При приближении источника к приемнику частота растет, при удалении — уменьшается.
2. Подробнее с работой гидрологических лагов можно ознакомиться в книгах М. А. Исаковича «Общая акустика» (М., 1973); A. Н. Парамонова, В. И. Забурдаева, B. М. Кушнира «Современные средства измерения гидрологических параметров океана» (Киев, «Наукова думка», 1979).