
Явление отражения радиоволн открыл изобретатель радио А. С. Попов в 1897 с. при проведении опытов по радиосвязи между кораблями. Великий ученый предсказал применение обнаруженного им явления для обеспечения успешной навигации в условиях ограниченной видимости. Однако понадобилось несколько десятилетий развития всех отраслей радиоэлектроники, чтобы создать современный радиолокатор.
Необходимость в судовом радиолокаторе стала ощущаться особенно остро в начале XX века, когда возросло количество судов и увеличилась их скорость. При этом участились столкновения, которые чаще всего заканчивались трагично. Сегодня трудно представить морской флот и авиацию без надежных радиолокационных станций и систем. Широко используются радиолокаторы или, как их еще называют, радары на маломерных судах: промысловых ботах, спортивных и туристских катерах, на яхтах открытого моря.
Информация об изображении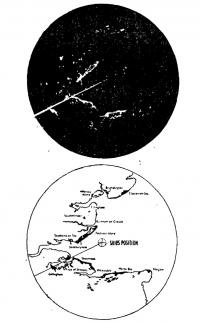
Сравнение радиолокационного изображения с навигационной картой устья р. Темзы
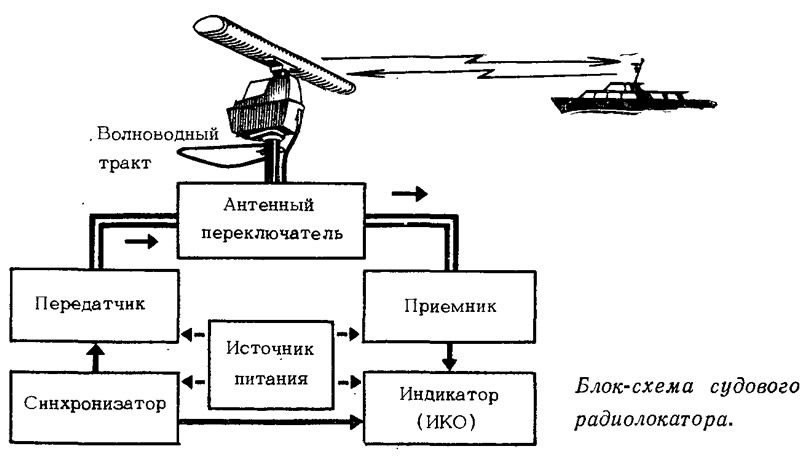
Простейшая радиолокационная станция (РЛС) содержит элементы, показанные на приводимой схеме. Передающее устройство запускается синхронизирующими импульсами и вырабатывает импульсы электромагнитных колебаний сверхвысокой частоты (СВЧ). Через антенну эти импульсы излучаются в пространство и облучают объекты, попадающие в зону направленного действия антенны. От объектов отражаются импульсы очень малой амплитуды. Они принимаются той же антенной и через антенный переключатель подводятся к приемнику, где принятые сигналы преобразовываются и усиливаются до величины, которая необходима в работе индикаторного устройства. На индикаторе (электронно-лучевой трубке) создается радиально-круговая развертка. Она обеспечивает во всех судовых РЛС наблюдение за окружающей обстановкой и определение координат объектов.
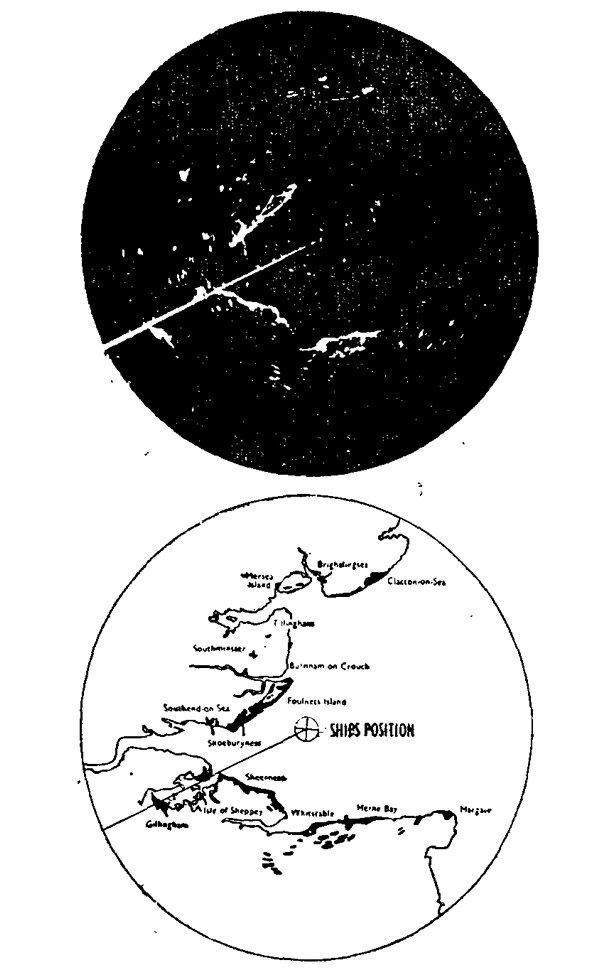
Сравнение радиолокационного изображения с навигационной картой устья р. Темзы
Принцип формирования изображения на экране индикатора кругового обзора (ИКО) заключается в следующем.
В момент запуска передатчика и излучения импульса в пространство синхронизирующий импульс запускает развертку, и электронный луч начинает чертить на экране светящуюся линию, начинающуюся от центра. Линия развертки вращается синхронно с вращением антенны. Иными словами, ее положение в любой момент времени определяет положение антенны, а значит, и направление излучения и приема.
Отраженный объектом сигнал с выхода приемника поступает на ИКО, где вызывает увеличение интенсивности электронного луча и кратковременное увеличение яркости развертки. Последовательное облучение объекта в нескольких периодах повторения, когда антенна направлена на объект, создает на соседних линиях развертки отметку от цели в виде короткой дужки. Дужку можно наблюдать на экране некоторое время за счет эффекта послесвечения. Таким же образом последовательно облучаются все объекты, и иа экране создается картина, воспроизводящая окружающую обстановку.
По расстоянию каждой отметки от центра экрана судят о времени запаздывания отраженного сигнала относительно прямого импульса, т. е. о расстоянии до объекта. Положение отметки на экране дает направление отраженного сигнала, то есть направление на цель.
Отсчет дальности на экране снимается по яркостным отметкам в виде неподвижных колец дальности (НКД). По числу НКД, уложившихся от центра экрана до отметки цели, отсчитывают дальность до цели. Для более точного отсчета дальности применяют подвижный круг дальности (ПКД), который совмещают с отметкой выбранной цели и по специальной шкале, связанной с рукояткой ПКД, снимают точный отсчет дальности.
Собственный курс обозначается на ИКО с помощью метки курса. Метка высвечивается на экране при вращении антенны каждый раз, когда направление ее излучения совпадает с диаметральной линией судна. Изображение на экране устанавливается так, чтобы метка курса совпадала с нулем шкалы азимутального круга, обрамляющего индикатор. Такая ориентировка изображения называется ориентировкой по курсу. Совмещая механический визир с серединой дужки от объекта, отсчитывают по шкале курсовой угол этого объекта.
При наличии на судне гирокомпаса и связи его с ИКО можно произвести ориентировку по «Норду». При этом нуль шкалы азимута всегда совпадает с направлением «Норда» на гирокомпасе (условно — «Нордом истинным»), а отсчет направления на обнаруженую цель дает истинный пеленг.
Таким образом, РЛС дает возможность измерить дальность и пеленг любого объекта (цели), создающего отметки на экране ИКО.
Новейшие достижения радиоэлектроники и появление интегральных микросхем позволяют уменьшать габариты аппаратуры и энергопотребление при увеличении надежности устройств, что сделало миниатюрные РЛС доступными для установки на малых судах как с точки зрения занимаемого объема и массы, так и с точки зрения их стоимости.
Яхтенные РЛС, как правило, работают в 3-сантиметровом диапазоне волн. Им не нужны большие антенно-волноводные тракты. Точность определения направления на объект при использовании таких локаторов достаточно высокая. Длительность импульсов выбирается порядка 0,05—0,8 микросекунды, что определяет высокую разрешающую способность и точность по дальности. В существующих миниатюрных РЛС мощность в импульсе на порядок меньше, чем в РЛС крупнотоннажных судов, и равна обычно 3 кВт и меньше.
Большинство современных мини-радиолокаторов позволяет выбирать шкалу дальности в зависимости от обстановки. Если объект находится на достаточном удалении, то выбирается шкала максимальной дальности, которую можно переключать по мере сближения, и наблюдать объект в более крупном масштабе. Шкалы минимальной дальности 0,5 и 0,25 мили удобны для наблюдения мелких объектов, например буев, до безопасного сближения с ними.
Особо популярны на малых судах миниатюрные РЛС с дальностью действия 1,5—2 мили и малой потребляемой мощностью питания от источника постоянного тока 12 В.
В зарубежной литературе появились сведения о портативном радиолокаторе американского производства. Его вес всего 1,45 кг. Наличие пели фиксируется звуковым сигналом, а дальность объекта отображается в цифровой форме.
Однако наиболее распространенной РЛС для самых малых судов является в настоящее время устройство двухприборного состава: индикатор размещается в рулевой рубке, где производится наблюдение, а антенна приемопередатчика и привод вращения вынесены на мачту. Это упрощает установку антенны на судне, а также уменьшает потери электромагнитной энергии в волноводном тракте, что, в свою очередь, дает возможность уменьшить мощность и габариты передатчика без ухудшения дальности действия РЛС.
Часто блок антенны РЛС катеров и яхт, совмещенный с приемопередатчиком, для защиты от внешней среды помещается внутри колпака-обтекателя, например, из стеклопластика. Весь этот герметизированный блок для обзора пространства (сканирования) вращается с частотой 20—30 об/мин.
Вообще установка блока антенны на малом судне имеет свои проблемы. Для увеличения дальности обнаружения необходимо антенну устанавливать возможно выше. Кроме того, следует учитывать наилучшее положение антенны для уменьшения наклонов луча при качке, приводящих к ухудшению радиолокационного наблюдения.
Обнаружение объектов в условиях любой видимости производится путем наблюдения экрана ИКО и опознавания целей на нем. Точечные объекты с размером до 150—200 м изображаются на ИКО в виде коротких дужек-мазков четко очерченной формы. Береговая черта, острова и тому подобное дают несколько размытые отметки протяженной формы, соответствующей их отражающей характеристике. По мере приближения к протяженным объектам отметки их меняют форму. Это объясняется тем, что вначале видны отметки только наиболее высоких местных предметов, таких, как маяки, вышки, строения, береговые склоны. Когда количество отражающих объектов увеличивается, отметки их слипаются.
После оценки обстановки выбираются отметки наиболее важных объектов с точки зрения опасности столкновения с ними или ориентиры и определяются их пеленги и дальности.
Определение своего местонахождения на момент учтенного времени с помощью РЛС выполняют путем измерения пеленга н расстояния до ориентира, дающего четкую отметку на ИКО. Затем производится прокладка результатов измерений па навигационной карте по общим правилам судовождения.
При определении места по расстояниям с ИКО снимают расстояния до двух или трех ориентиров, дающих четкие отметки на экране, а затем на навигационной карте делают засечки, на пересечении которых находится местоположение своего судна.
Способ пеленгов применяют в случае, если береговая черта имеет низменный характер и не дает четкого изображения па экране, но в то же время имеются хорошо различимые местные предметы в глубине побережья или, например, мысы. Имея направление на эти предметы, находят на карте свое местоположение.
Использование РЛС при плавании вдоль берегов и в узкостях имеет ряд особенностей. Крутые склоны берегов, скалы, рифы, местные предметы дают отраженные сигналы. Большое значение имеет навык опознавания различных объектов по их радиолокационному изображению. Сличение изображения с навигационной картой, на которой заранее помечены все хорошо отражающие объекты, очень помогает судоводителю ориентироваться в обстановке.
В стесненных водах, например при подходе к портам, времени на сличение радиолокационной картины с картой не остается. Поэтому приходится заранее изучить маршрут по навигационным пособиям с тем, чтобы управлять судном только по экрану РЛС. При плавании в узкостях пользуются шкалами крупного масштаба (1,5 или 5 миль), что дает возможность более точно определить расстояние до ориентиров и буев.
Одним из наиболее важных применений РЛС в судовождении является использование их для предупреждения столкновений судов в море в условиях плохой видимости.
Основными этапами работы по предупреждению столкновения являются: определение курса и скорости встречного судна, определение расстояния кратчайшего сближения при условии, что суда будут следовать неизменными курсами и скоростями, выбор маневра на расхождение, наблюдение за маневрами встречного судна (цели) для предотвращения повторной угрозы столкновения.
В простейшем случае для определения элементов движения встречного судна и параметров расхождения производится прокладка радиолокационных данных в режиме относительного движения на планшете. Определяют направление перемещения и скорость цели. Скорость измеряется по расстоянию между двумя точками, проходимому за определенный промежуток времени.
Несмотря на появление новых методов локации, например, лазерной и инфракрасной, радиолокаторы останутся основных! средством для получения информации об окружающей обстановке на море и в ближайшем будущем.
Дальнейшее уменьшение габаритов и массы РЛС в обозримом будущем пойдет по пути комплексной микроминиатюризации. Наряду с широким применением в аппаратуре интегральных микросхем будут найдены решения для микроминиатюризации антенных систем, индикаторных устройств, источников питания, высокочастотных элементов, совместимых с узлами и блоками в интегральном исполнении.
Характерной особенностью конструкции новых РЛС явится модульное построение, которое кроме компактности обеспечивает компоновку различных радиолокаторов из стандартных блоков.
Автоматизация обработки информации, которая применяется сейчас в сложных системах предупреждения столкновений, в радиолокаторах для малых судов поможет разгрузить команду от работы на РЛС или максимально упростить ее.